

Приклад-2014
.pdfНАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ “КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ” МЕХАНІКО-МАШИНОБУДІВНИЙ ІНСТИТУТ
КАФЕДРА ПРИКЛАДНОЇ ГІДРОАЕРОМЕХАНІКИ ТА МЕХАНОТРОНІКИ
Всеукраїнська студентська олімпіада за напрямом „Механотроніка в машинобудуванні”
ПРИКЛАД РОЗВ’ ЯЗКУ КОНКУРСНОГО ЗАВДАННЯ №1 1
(ПНЕВМАТИЧНА, ЕЛЕКТРОПНЕВМАТИЧНА РЕАЛІЗАЦІЯ ТА
ПРОГРАМУВАННЯ КОНТРОЛЕРУ МОВОЮ STL)
ТА КОНКУРСНОГО ЗАВДАННЯ №2 3
( ЕЛКТРОГІДРАВЛІЧНА РЕАЛІЗАЦІЯ ТА ПРОГРАМУВАННЯ
КОНТРОЛЕРУ МОВОЮ STL)
Київ 2 0 1 4
ПРИКЛАД |
Київ – 2014 |
ПРИКЛАД РОЗВ’ЯЗКУ ЗАДАЧ «а», «б» і «в» ЗАВДАННЯ №11 ТА ЗАДАЧІ «а» ЗАВДАННЯ №23
Окрім основного завдання до задач додаються «Додаткові умови», які уточнюють або визначають технічні засоби, що мають бути використані в системі, та будуть повідомлені тільки в день початку змагань, наприклад:
Тип виконавчих пристроїв: циліндр двосторонньої дії, циліндр односторонньої дії.
Тип пристроїв контролю за виконанням дій: кінцеві перемикачі, реле тиску, реле затримки часу, геркони, ємнісні сенсори, індуктивні сенсори, оптичні сенсори.
Тип засобів керування: бістабільні, моностабільні двопозиційні, моностабільні трипозиційні.
Приклад завдання №11 розглянуто для циліндрів двосторонньої дії з використанням розподільних клапанів з бістабільним керуванням, кінцевих перемикачів, реле тиску та реле часу.
Задачі «а», «б» і «в» належать до конкурсної програми, задачі «г», «д» та «завдання підвищеної складності» наведено для самостійної роботи та підготовки до змагань в особистому заліку.
Приклад завдання №23 розглянуто для варіанту використання гідроциліндра та гідромотора в якості виконуючих пристроїв та трипозиційних клапанів з моностабільним керуванням.
В завданнях з електрогідравліки задача «а» належить до конкурсної програми, інші задачі наведено для самостійної роботи.
Під час командних та особистих змагань схеми систем та опис їх складу виконуються на спеціальних розграфлених аркушах паперу, наданих разом з завданням.
Кожній команді надається таблиця з умовними позначеннями для побудови схем систем.
Використання під час змагань інших матеріалів НЕ передбачено Правилами Олімпіади.
1
ПРИКЛАД |
|
Київ – 2014 |
|
|
|
Завдання №11 |
|
А |
5 |
3 |
Б |

 2 1
2 1 
 4
4
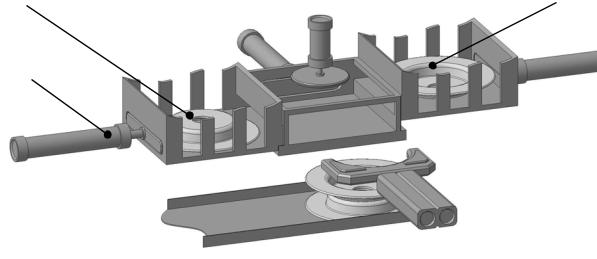
Об’єкт автоматизації: Зварювальний автомат лінії по виготовленню дисків автомобільних коліс.
Диск складається з двох напівдисків (А і Б), виготовлених шляхом штампування. Напівдиски з’єднуються по контуру за допомогою зварного шва та по площині за допомогою місцевого (точкового) зварювання. Зварювання виконується зварювальним автоматом за шість секунд. Перший напівдиск надається з нижнього магазину приводом 1 до кондуктора. Після повернення приводу 1, другий напівдиск з верхнього магазину приводом 2 встановлюється в кондуктор поверх першого напівдиску. Пневмоциліндр 3 здійснює потужне притискання напівдисків один до одного та їх фіксацію (контроль за тиском), після чого приводом 4 до площини зварювання пересувається зварювальний автомат на шість секунд. За цей час виконується остаточне з’єднання напівдисків. По завершенню операції зварювання (контроль за часом – 6 секунд) привод 4 та циліндр фіксації 3 повертаються у вихідне положення. Готовий диск виштовхується пневматичним циліндром 5 на позицію відвантаження. Після повернення всіх механізмів у вихідне положення система повторює виконання циклу зварювання. Контроль часу здійснюється за допомогою реле часу (пневматичного або електричного) або таймера.
2
ПРИКЛАД |
Київ – 2014 |
Задача 11.а. Розробити пневматичну схему системи керування приводом завантаження другого напівдиску та приводом фіксації напівдисків (використати приводи 2 та 3). Контроль завершення дії першого приводу та наявності напівдиску у верхньому магазині імітувати пневматичною кнопкою. Вмикання приводів у дію в режимі неперервного циклу виконується за допомогою кнопки з фіксатором S1, зупинка системи після завершення циклу – у разі вимикання кнопки S1.
Задача 11.б. Розробити електропневматичну схему системи керування приводом завантаження другого напівдиску та приводом фіксації напівдисків (використати приводи 2 та 3). Контроль завершення дії першого приводу та наявності напівдиску у верхньому магазині імітувати оптичним сенсором. Вмикання приводів у дію в режимі неперервного циклу виконується за допомогою кнопки з фіксатором S1, зупинка системи після завершення циклу – у разі вимикання кнопки S1.
Задача 11.в. Розробити електропневматичну схему і програму керування в середовищі FST мова STL для керування діями приводів завантаження другого напівдиску та фіксації напівдисків (використати приводи 2 та 3). Вмикання системи у дію в режимі неперервного циклу виконується за допомогою кнопки S1, зупинка системи після завершення циклу у разі повторного натискання кнопки S1.
Задача 11.г. Розробити електропневматичну схему і програму керування в середовищі FST мова LD для керування діями приводів завантаження другого напівдиску та фіксації напівдисків (використати приводи 2 та 3). Вмикання системи у дію в режимі неперервного циклу виконується за допомогою кнопки S1, зупинка системи після завершення циклу у разі повторного натискання кнопки S1.
Задача 11.д. Розробити електропневматичну схему і програму керування в середовищі FST мова STL для керування роботою зварювального автомату (використовуються приводи 1, 2, 3, 4, 5). Вмикання системи у дію в режимі неперервного циклу виконується за допомогою кнопки S1 без фіксатора, зупинка системи після завершення циклу - повторне натискання кнопки S1.
Завдання підвищеної складності. Доповнити програму керування задачі 11.д. сервісними режимами:
•перше натискання S1 – неперервний цикл роботи системи;
•друге натискання S1 – завершення циклічної роботи системи;
•перше натискання кнопки S4 – перехід в режим ручного керування приводами: 1 – кнопка S1, 2 – кнопка S2, 3 – кнопка S3;
•повторне натискання кнопки S4 – вихід системи з режиму ручного керування.
Розв’язок задачі складається з:
−переліку обладнання,
−схем підключення елементів системи,
−опису дій системи,
−зібраної на стенді та налагодженої за своїми діями і параметрами системи.
3
ПРИКЛАД |
Київ – 2014 |
|
ВИРІШЕННЯ ЗАДАЧІ «А» |
|
Склад системи задачі №11 «а» (пневматика) |
Привід подачі напівдиска (2)
Пневматичний циліндр двосторонньої дії.
Керування – клапан 5/2 бістабільний з пневматичним керуванням. Контроль початкового положення – кінцевий вимикач (клапан 3/2 з
механічним керуванням).
Контроль кінцевого положення – кінцевий вимикач (клапан 3/2 з механічним керуванням).
Привід затискання та фіксації (3)
Пневматичний циліндр двосторонньої дії.
Керування – клапан 5/2 бістабільний з пневматичним керуванням. Контроль початкового положення – кінцевий вимикач (клапан 3/2 з
механічним керуванням).
Контроль функції затискання під час технологічної операції – пневматичне реле тиску з пневматичним вихідним сигналом.
Контроль технологічного часу – пневматичне реле часу з нормально закритим клапаном 3/2.
Елемент пам’яті
Пневматичний розподільчий клапан з бістабільним керуванням (клапан 5/2 з пневматичним керуванням).
Зовнішнє керування
Вмикання системи – пневматична кнопка з фіксатором Sst (клапан 3/2 з ручним керуванням)
Імітація наявності та завантаження першого напівдиску – пневматична кнопка без фіксатора Simit (клапан 3/2 з ручним керуванням).
4

ПРИКЛАД Київ – 2014
Опис роботи системи (задача №11 «а», пневматика)
В початковому положенні штоки циліндрів №2 та №3 втягнуто.
Послідовність дій в циклі: 2 → 4 → 2 →3 → 4 →3 (4 – елемент пам’яті)
Логічні вирази команд керування:
Y2 |
X |
|
|
X |
|
Xst Ximit |
Y |
|
|
|
|
X4 |
||||
3 |
4 |
2 |
||||||||||||||
Y3 X |
|
X4 |
Y |
|
|
|
X |
|
|
|||||||
2 |
3 |
4 |
||||||||||||||
Y4 |
X 2 |
Y |
|
X3 |
||||||||||||
4 |
||||||||||||||||
При натисканні кнопок Sst та Simit система починає роботу:
1.Висувається шток циліндра №2
2.Вмикається елемент пам’яті
3.Повертається шток циліндра №2
4.Висувається шток циліндра №3
5.Зростає тиск до рівня, встановленого на реле тиску
6.Вимикається елемент пам’яті
7.Вмикається реле часу (6 секунд)
8.Повертається шток циліндра №3
Якщо від кнопок Sst та Simit система отримує сигнали, що дорівнюють «1», то цикл повторюється спочатку.
Якщо сигнал від Simit дорівнює “0”, то наступний цикл не розпочинається. Якщо сигнал від Sst приймає значення “0” під час виконання циклу, то система допрацьовує поточний цикл і зупиняється.
5
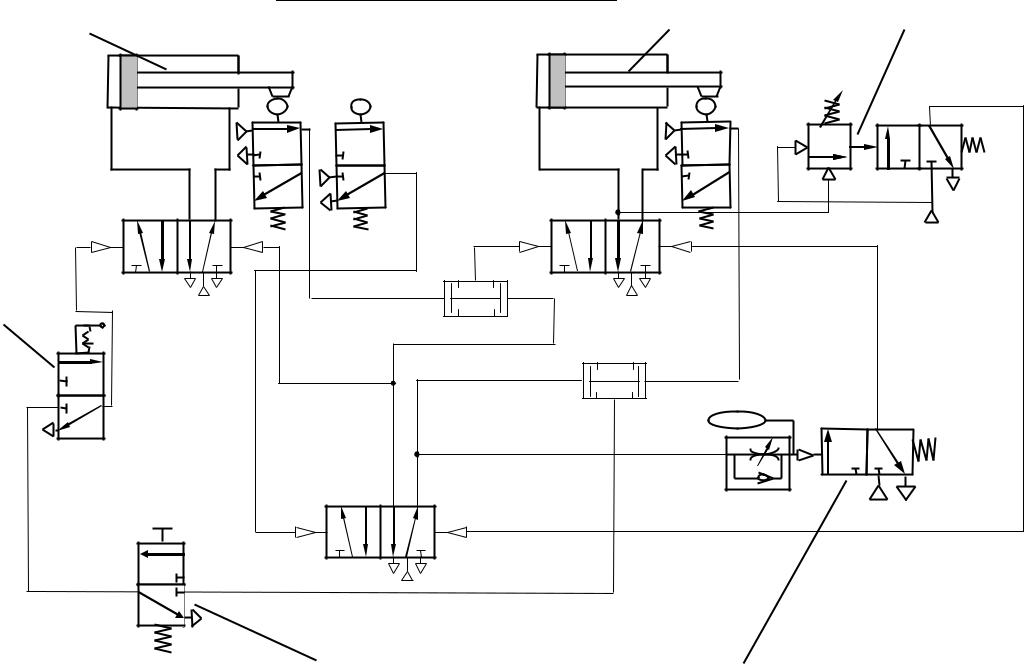
Задача №11 «а» Пневматична реалізація |
|
|
Привод 2 |
Привод 3 |
Реле тиску |
Кнопка |
|
|
«Старт» |
|
|
6 |
|
|
Кнопка, що імітує наявність |
|
Реле часу |
заготовки |
|
|
ПРИКЛАД |
Київ – 2014 |
|
ВИРІШЕННЯ ЗАДАЧІ «Б» |
|
Склад системи Задачі №11 «б» (електропневматика) |
Привід подачі напівдиска (2)
Пневматичний циліндр двосторонньої дії.
Керування – клапан 4/2 бістабільний з електромагнітним керуванням. Контроль початкового положення – кінцевий вимикач.
Контроль кінцевого положення – кінцевий вимикач.
Привід затискання та фіксації (3)
Пневматичний циліндр двосторонньої дії.
Керування – клапан 4/2 бістабільний з електромагнітним керуванням. Контроль початкового положення – кінцевий вимикач.
Контроль функції затискання під час технологічної операції – пневматичне реле тиску з електричним вихідним сигналом.
Контроль технологічного часу – електричне реле часу з затримкою за переднім фронтом.
Елемент пам’яті
Електрорелейна схема на додаткових реле з пріоритетом за вимиканням.
Зовнішнє керування
Вмикання системи – електроконтактна кнопка з фіксатором Sst.
Імітація наявності та завантаження першого напівдиску – електроконтактна кнопка без фіксатора Simit.
7

ПРИКЛАД Київ – 2014
Опис роботи системи (задача №11 «б», електропневматика)
В початковому положенні штоки циліндрів №2 та №3 втягнуто.
Послідовність дій в циклі: 2 → 4 → 2 →3 → 4 →3 (4 – елемент пам’яті)
Логічні вирази команд керування:
Y2 |
X |
|
|
X |
|
Xst Ximit |
Y |
|
|
|
|
X4 |
||||
3 |
4 |
2 |
||||||||||||||
Y3 X |
|
X4 |
Y |
|
|
|
X |
|
|
|||||||
2 |
3 |
4 |
||||||||||||||
Y4 |
X 2 |
Y |
|
X3 |
||||||||||||
4 |
||||||||||||||||
При натисканні кнопок Sst та Simit система починає роботу:
1.Висувається шток циліндра №2
2.Вмикається елемент пам’яті
3.Повертається шток циліндра №2
4.Висувається шток циліндра №3
5.Зростає тиск до рівня, встановленого на реле тиску
6.Вимикається елемент пам’яті
7.Вмикається реле часу (6 секунд)
8.Повертається шток циліндра №3
Якщо від кнопок Sst та Simit система отримує сигнали, що дорівнюють «1», то цикл повторюється спочатку.
Якщо сигнал від Simit дорівнює “0”, то наступний цикл не розпочинається. Якщо сигнал від Sst приймає значення “0” під час виконання циклу, то система допрацьовує поточний цикл і зупиняється.
8
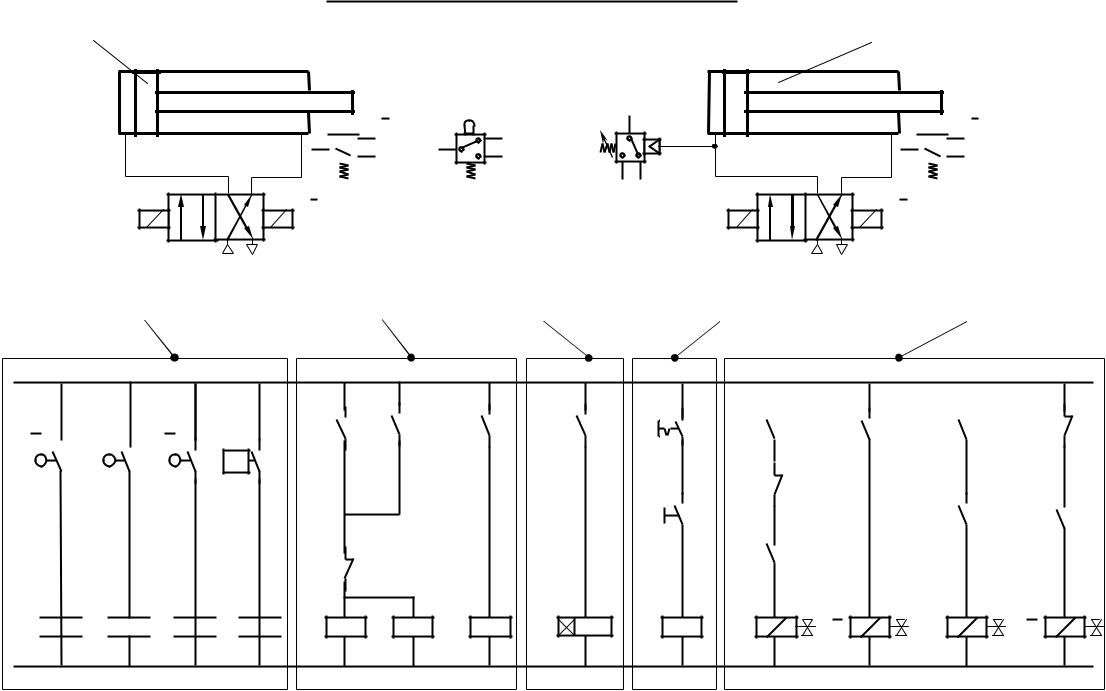
Задача №11 «б» Електропневматична реалізація
Привод 2 |
Привод 3 |
 X2 +
X2 + 
Y2 |
Y2 |
X2 |
X3 |
+ |
|
 X3 +
X3 + 
Y3 |
Y3 |
9
Підключення датчиків |
Модуль елемента пам’яті з |
Реле часу |
Модуль вмикання системи |
Модуль керування діями |
приводів 2 та 3 |
||||
положення та реле тиску |
додатковим реле К7 |
|
|
|
+24В
X2 X2 X3 X3
p ≥ |
К1 
 К2
К2 
 К3
К3 
 K4
K4 

K2 |
К5 |
K4 |
K4 |
Sst |
Simit
К6
K5 |
K7 |
K6 |
РВ |
K8 |
К3 |
|
|
К5 |
К1 |
|
|
К7 |
|
|
|
|
||||
|
|
К5
К5 PB
K8
Y2 |
Y2 |
Y3 |
Y3 |
0В