

Приклад-2014
.pdfПРИКЛАД |
Київ – 2014 |
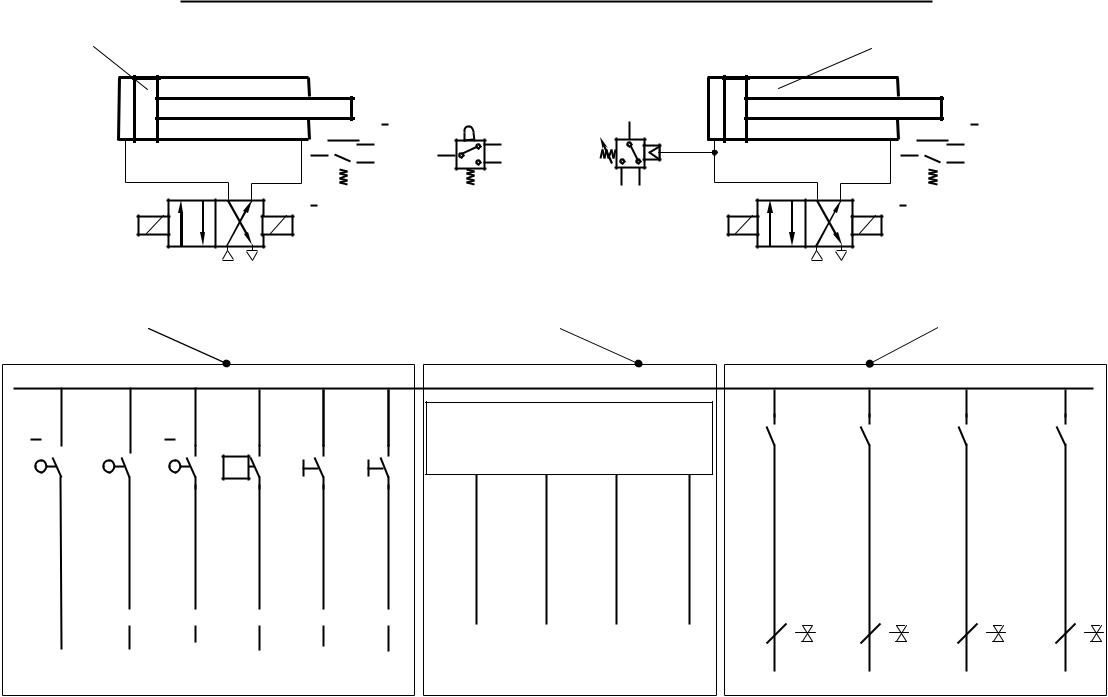
ВИРІШЕННЯ ЗАДАЧІ «В» Склад системи задачі №11 «в» (програмування контролера)
Привід подачі напівдиска (2)
Пневматичний циліндр двосторонньої дії.
Керування – клапан 4/2 бістабільний з електромагнітним керуванням (сигнали Y2, YN2).
Контроль початкового положення – кінцевий вимикач (сигнал XN2). Контроль кінцевого положення – кінцевий вимикач (сигнал X2).
Привід затискання та фіксації (3)
Пневматичний циліндр двосторонньої дії.
Керування – клапан 4/2 бістабільний з електромагнітним керуванням (сигнали Y3, YN3).
Контроль початкового положення – кінцевий вимикач (сигнал XN3). Контроль функції затискання під час технологічної операції – пневматичне
реле тиску з електричним вихідним сигналом (сигнал X3). Контроль технологічного часу – таймер Т1.
Елемент пам’яті
Прапори F0.0 (XN4) та F0.1(X4)
Контролер FEC compact
Входи: I0.0, I0.1, I0.2, I0.3, I0.4, I0.5, I0.6 Виходи: O0.0, O0.1, O0.2, O0.3
Прапори: F0.0, F0.1, F0.2, F0.3
Таймер: T1
Зовнішнє керування
Вмикання системи – електроконтактна кнопка з фіксатором Sst.
Імітація наявності та завантаження першого напівдиску – електроконтактна кнопка без фіксатора Simit.
10

ПРИКЛАД |
Київ – 2014 |
|
Опис дій системи |
|
|
|
|
|
|
(задача №11 «в» програмування контролера) |
||||||||||||||
В початковому положенні штоки циліндрів №2 та №3 втягнуто. |
||||||||||||||||||||
Послідовність дій в циклі: |
2 → 4 → |
|
→3 → |
|
→ |
|
(4 – елемент пам’яті) |
|||||||||||||
2 |
4 |
3 |
||||||||||||||||||
Логічні вирази команд керування: |
||||||||||||||||||||
Y2 X |
|
|
X |
|
Xst Ximit |
Y |
|
|
|
X4 |
||||||||||
3 |
4 |
|||||||||||||||||||
2 |
||||||||||||||||||||
Y3 X |
|
X4 |
Y3 X |
|
|
|||||||||||||||
2 |
4 |
|||||||||||||||||||
Y4 X 2 |
Y |
|
X3 |
|||||||||||||||||
4 |
||||||||||||||||||||
При натисканні кнопок Sst та Simit система починає роботу:
1.Висувається шток циліндра №2 (команда Y2, сигнал контролю X2)
2.Вмикається елемент пам’яті (X4=1, XN4=0)
3.Повертається шток циліндра №2(команда YN2, сигнал контролю XN2)
4.Висувається шток циліндра №3(команда Y3, сигнал контролю X3)
5.Зростає тиск до рівня, встановленого на реле тиску(X3=1)
6.Вимикається елемент пам’яті + вмикається таймер (X4=0, за 6 секунд
XN4=1)
7.Повертається шток циліндра №3 (команда YN3, сигнал контролю XN3) Якщо від кнопок Sst та Simit система отримує сигнали «1», то цикл повторюється спочатку.
Якщо сигнал від Simit дорівнює “0”, то наступний цикл не розпочинається. Якщо сигнал від Sst приймає значення “0” під час виконання циклу, то система допрацьовує поточний цикл і зупиняється.
11
Задача №11 «в». Керування діями системи за допомогою контролера (схема підключення)
Привод 2 |
Привод 3 |
 X2 +
X2 + 
Y2 |
Y2 |
X2 |
X3 |
+ |
|
 X3 +
X3 + 
Y3 |
Y3 |
12 |
Під’єднання входів контролера (Inputs) |
+24В
X2 X2 X3 X3 Sst Simit
p ≥ |
Під’єднання виходів контролера (Outputs) |
Під’єднання електромагнитів керуючих |
клапанів до приводів 2 і 3 |
O0.0 |
|
O0.1 |
|
O0.2 |
|
O0.3 |
|
К1 |
К2 |
К3 |
К4 |
|
|
|
|
|
|
|
|
|
|
|
|
P L C (Output)
I0.0 |
|
I0.1 |
|
I0.2 |
|
I0.3 |
|
I0.4 |
|
I0.5 |
|
K1 |
|
|
K2 |
|
|
K3 |
|
|
K4 |
|
|
Y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
P L C (Input) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Y2 |
|
|
Y3 |
|
Y3 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0В

13
Задача №11 «в». Алгоритм керування системою (приводи 2 та 3, елемент пам’яті «4») мова STL
STEP 0 «Перехід системи в початковий стан»
IF |
NOP |
THEN |
RESET Y2 |
|
SET YN2 |
|
RESET Y3 |
|
SET YN3 |
|
RESET XT1 |
|
RESET X4 |
|
SET XN4 |
IF |
XN2 AND XN3 |
THEN |
JMP TO 1 |
STEP 1 «Основний крок програми» |
|
IF |
XN3 AND XN4 AND Sst AND Simit |
THEN |
SET Y2 |
|
RESET YN2 |
IF |
X4 |
THEN |
SET YN2 |
|
RESET Y2 |
IF |
XN2 AND X4 |
THEN |
SET Y3 |
|
RESET YN3 |
IF |
XN4 |
THEN |
SET YN3 |
|
RESET Y3 |
IF |
X2 |
THEN |
SET X4 |
|
RESET XN4 |
|
RESET XT1 |
IF |
N XT1 AND X3 |
THEN |
SET T1 |
|
WITH 6s |
|
SET XT1 |
|
RESET X4 |
IF |
N T1 AND XT1 «відлік часу» |
THEN |
SET XN4 |
IF |
NOP |
THEN |
JMP TO 1 |
Входи контролера
Виходи контролера
Аllocation list
Abs |
Simb |
O0.0 |
Y2 |
O0.1 |
YN2 |
O0.2 |
Y3 |
O0.3 |
YN3 |
I0.0 |
XN2 |
I0.1 |
X2 |
I0.2 |
XN3 |
I0.3 |
X3 |
I0.4 |
Sst |
I0.5 |
Simit |
F0.0 |
XN4 |
F0.1 |
X4 |
F0.2 |
XT1 |
T1 |
Ttechn |
TP1 |
|
Sst сигнал вмикання системи
Simit сигнал імітації присутності заготовки X4 прапор ввімкнутого елемента пам’яті XN4 прапор вимкнутого елемента пам’яті із затримкою часу (T1)
XT1 прапор покриття таймера T1 (запобігає повторному вмиканню)
Логічні вирази команд керування:
Y2 |
X3 X4 Xst Ximit |
Y |
|
|
|
X4 |
||||
2 |
||||||||||
Y3 X |
|
X4 |
Y3 X |
|
|
|||||
2 |
4 |
|||||||||
Y4 |
X2 |
Y |
|
X3 |
||||||
4 |
||||||||||
ПРИКЛАД |
|
Київ - 2014 |
|
|
Завдання № 23 |
3 |
2 |
1 |
Б
А
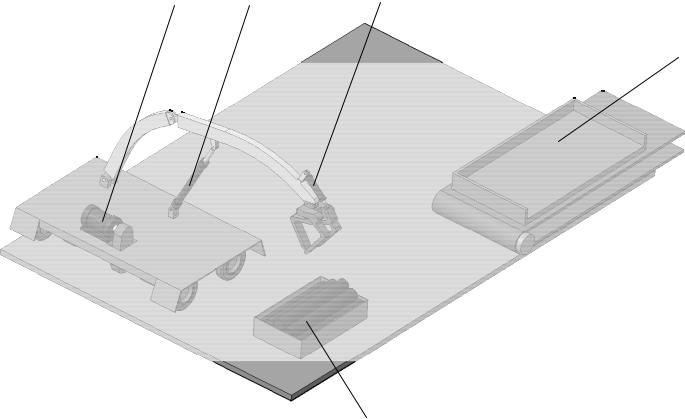
Об’єкт автоматизації: Гідравлічний привод мобільного навантажувача деревообробного комбінату.
Підготовлені до промислової переробки дерев’яні колоди збираються на ділянці і відвантажуються на спеціальну площадку «А». Навантажувач, що переміщується за рахунок шасі, оснащений реверсним гідромотором 3, під’їжджає до заздалегідь обробленої колоди. Навантажувач за допомогою приводу 2 опускає схват до колоди, захоплює її за допомогою гідравлічних затискачів 1 і підіймає на транспортну висоту приводом 2. Навантажувач підвозить колоду до платформи площадки «Б», після чого привод 2 опускає колоду на висоту розвантаження і розкриває затискачі 1. Під час руху колеса навантажувача обертаються за рахунок гідромотора 3. Після звільнення колоди, на що витрачається не більше 5 секунд, привод 2 піднімає схват в транспортне положення і навантажувач під’їжджає до наступної колоди.
Зупинка навантажувача біля площадки «Б» контролюється за допомогою встановленого на її платформі датчику 5, і виконується автоматично, по досягненню колесами бортика платформи «Б». Зупинка навантажувача біля колоди виконується по сигналу від оператора.
Після того, як чергова колода відвантажена і приводи 1, 2 повернуться в вихідне положення, а оператор зупинить шасі навантажувача біля наступної колоди, гідравлічна система повторює цикл завантаження.
14
ПРИКЛАД |
Київ - 2014 |
Задача 23.а. Розробити електрогідравлічну схему і програму керування в середовищі FST мова STL для керування діями привода вертикального переміщення та гідромотора шасі навантажувача (використовуються приводи 2 і 3). Контроль зупинки навантажувача біля колоди імітується електроконтактною кнопкою без фіксатора. Контроль наближення навантажувача до бортів площадки «Б» імітується датчиком. Час роботи привода схвата 1 складає 5 секунд. Вмикання приводів у дію в режимі неперервного циклу виконується за допомогою кнопки без фіксатора S1, зупинка системи після завершення циклу – повторне натискання S1.
Задача 23.б. Розробити електрогідравлічну схему і програму керування в середовищі FST мова LD для керування діями привода вертикального переміщення та гідромотора шасі навантажувача (використовуються приводи 2 і 3). Контроль зупинки навантажувача біля колоди імітується електроконтактною кнопкою без фіксатора. Контроль наближення навантажувача до бортів площадки «Б» імітується датчиком. Час роботи привода схвата 1 складає 5 секунд. Вмикання приводів у дію в режимі неперервного циклу виконується за допомогою кнопки без фіксатора S1, зупинка системи після завершення циклу – повторне натискання S1.
Задача 23.в. Розробити електрогідравлічну схему і програму керування в середовищі FST мова STL для керування роботою навантажувача (використовуються приводи 1, 2, 3). Вмикання системи у дію в режимі неперервного циклу виконується за допомогою кнопки S1 без фіксатора, зупинка системи після завершення циклу - повторне натискання кнопки S1.
Завдання підвищеної складності. Доповнити програму керування задачі 23.в. сервісними режимами:
•перше натискання S1 – неперервний цикл роботи системи;
•друге натискання S1 – завершення циклічної роботи системи;
•перше натискання кнопки S4 – перехід в режим ручного керування приводами: 1 – кнопка S1, 2 – кнопка S2, 3 – кнопка S3;
•повторне натискання кнопки S4 – вихід системи з режиму ручного керування.
Розв’язок задачі складається з:
−переліку обладнання,
−схем підключення елементів системи,
−опису дій системи,
−зібраної на стенді та налагодженої за своїми діями і параметрами системи.
15
ПРИКЛАД |
Київ – 2014 |
|
ВИРІШЕННЯ ЗАДАЧІ «А» |
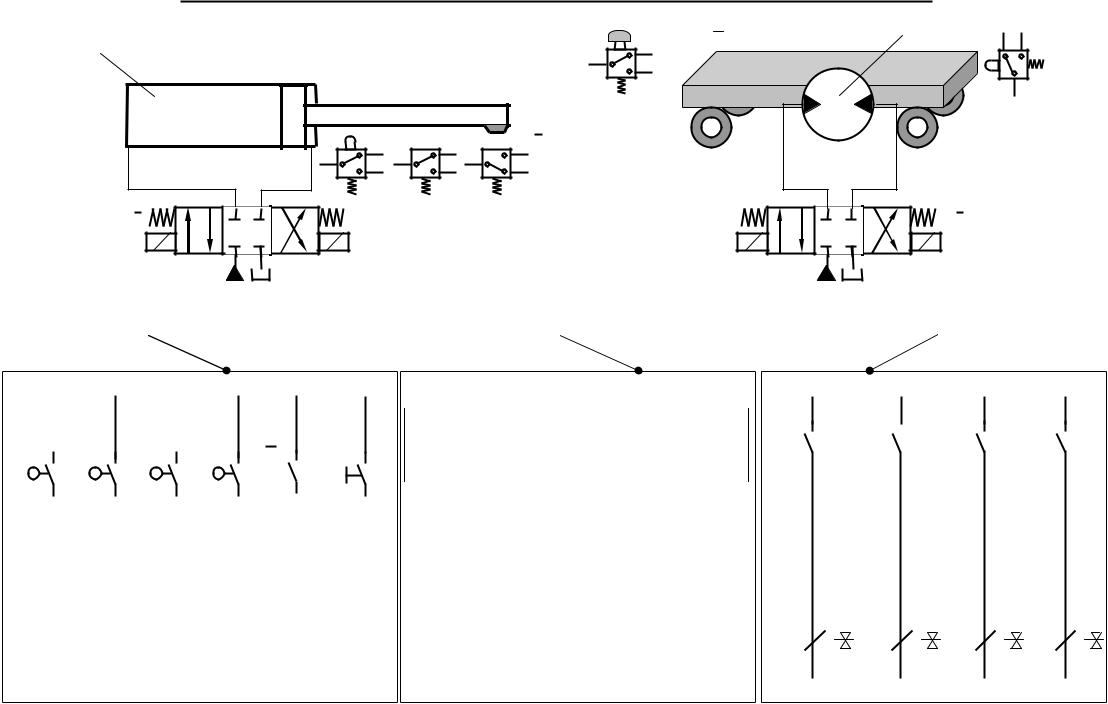
Склад системи задачі №23, «а» (програмування контролера)
Привід підйому-опускання схвата (2)
Гідравлічний циліндр двосторонньої дії. Початкове положення – верхнє (шток висунуто).
Керування – клапан 4/3 моностабільний з електромагнітним керуванням (сигнали керування опускання - Y2, підйом - YN2).
Контроль початкового положення – кінцевий вимикач (сигнал XN2). Контроль середнього положення – кінцевий вимикач (сигнал X2М). Контроль нижнього положення – кінцевий вимикач (сигнал X2).
Привід шасі (3)
Гідравлічний мотор реверсивний.
Керування – клапан 4/3 моностабільний з електромагнітним керуванням (сигнал керування рухом на вивантаження Y3, сигнал керування рухом на завантаження YN3).
Контроль положення завантаження або зупинки – кнопка без фіксатора на пульті оператора (зовнішнє керування: короткочасний сигнал KNOP, запам’ятовує XN3).
Контроль положення вивантаження – датчик на платформі (зовнішнє керування: короткочасний сигнал SENS, запам’ятовує X3).
Керування живленням датчика середнього положення приводу 2 (“6”)
Керування – реле підключення живлення до датчика (сигнал керування
Y6).
Контроль підключеного стану – за сигналом Y6 (X6 = Y6). Контроль відключеного стану – за сигналом N Y6 (XN6 = N Y6).
Елемент пам’яті “7”
Прапори F0.0 (XN7) та F0.1(X7)
Імітація часу затискання бревна
таймер Т1
Імітація часу вивільнення бревна
таймер Т2
Контролер FEC compact
Входи: I0.0, I0.1, I0.2, I0.3, I0.4, I0.5
Виходи: O0.0, O0.1, O0.2, O0.3, О0.4 Прапори: F0.0, F0.1, …, F0.7, F1.0, …, F1.3
Таймери: T1, Т2
Зовнішнє керування
Вмикання та вимикання системи – електроконтактна кнопка без фіксатора S1.
Сигнал оператора про наближення до позиції завантаження або зупинку руху – електроконтактна кнопка без фіксатора KNOP.
16
ПРИКЛАД |
Київ – 2014 |
|
Опис дій системи |
|
(задача №23 «а» програмування контролера) |
В початковому положенні шток циліндру №2 висунуто, гідромотор №3 зупинено.
Послідовність дій в циклі: 2 →7 →2 →3,6 →2 →7 →2 →3,6 (7 – елемент пам’яті, 6 – подача живлення до датчику середнього положення) Логічні вирази команд керування:
Y2 X |
|
|
|
X |
|
X |
|
Xst +X3 X6 X7 |
X |
2M |
Y |
|
|
|
|
X7 X3 X |
|
+X |
|
X3 X6 |
|||||||||||||
3 |
7 |
6 |
|||||||||||||||||||||||||||||||
2 |
6 |
7 |
|||||||||||||||||||||||||||||||
Y3 X |
|
|
|
X7 |
Y3 X |
|
|
|
X |
|
|
|
|
||||||||||||||||||||
2 |
2 |
7 |
|||||||||||||||||||||||||||||||
Y6 |
X |
|
X7 |
Y |
|
|
X |
|
X |
|
|
||||||||||||||||||||||
2 |
6 |
2 |
7 |
||||||||||||||||||||||||||||||
Y7 |
X2 X3 |
Y |
|
X2m X3 |
|||||||||||||||||||||||||||||
7 |
|||||||||||||||||||||||||||||||||
При першому натисканні кнопки S1 (сигнал Xst) та кнопки оператора KNOP (сигнал X3 ), що позначає позицію завантаження бревна, система починає роботу:
1.Втягується шток циліндра №2 (схват опущено, команда Y2, сигнал контролю X2)
2.Вмикається елемент пам’яті №7 + вмикається таймер Т1: X7=0, XN7=1, за
5секунд X7=1, XN7=0 (імітація спрацювання приводу №1)
3.Повертається до вихідного положення шток циліндра №2 (підйом бревна, команда YN2, сигнал контролю XN2)
4.Вмикається гідромотор №3 (рух шасі до площадки “А”, команда Y3, сигнал контролю від датчику SENS (запам’ятовує сигнал X3, за яким гідромотор зупиняється)
та одночасно
Вмикається живлення датчику проміжного положення X2М - команда Y6
5.Втягується до проміжного положення шток циліндра №2 (опускання бревна, команда Y2, сигнал контролю X2М)
6.Вимикається елемент пам’яті (X7=0, XN7=1) + вимикається таймер Т2: X7=1, XN7=0, за 5 секунд X7=0, XN7=1 (імітація спрацювання приводу №1)
7.Повертається до вихідного положення шток циліндра №2 (підйом схвата, команда YN2, сигнал контролю XN2)
8.Вмикається реверсний рух гідромотора №3 (рух шасі до позиції завантаження, команда YN3, сигнал контролю від кнопки оператора KNOP
(запам’ятовує сигнал X3 ), за яким гідромотор зупиняється)
та одночасно
Вимикається живлення датчику проміжного положення X2М команда N Y6
Якщо сигнал від кнопки S1 вдруге приймає значення “1” під час виконання циклу, то система допрацьовує поточний цикл і зупиняється.
17
Задача №23 «а». Керування діями системи за допомогою контролера (схема підключення)
Привод 2
|
X2 |
+ |
+ |
Y2 |
Y2 |
 X2M
X2M  X2
X2
+
KNOP (X3) |
Привод 3 |
|
Y3 |
Y3 |
SENS (X3)
+
18
Під’єднання входів контролера (Inputs) |
Під’єднання виходів контролера (Outputs) |
Під’єднання електромагнитів керуючих |
|
клапанів приводів 2 і 3 |
|||
|
|
+24В
|
|
|
O0.0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1 |
К2 |
К3 |
К4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
O0.0 |
|
O0.1 |
|
O0.2 |
|
O0.3 |
|
O0.4 |
|
|
||||||||||||
X |
|
|
X2 X2M |
|
X3 X3 |
S1 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
2 |
|
|
|
|
|
P L C (Output) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
2M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
I0..0 |
|
|
I0.1 |
|
|
I0.2 |
|
|
I0.3 |
|
|
I0.4 |
|
|
I0.5 |
|
|
|
|
|
|
K2 |
|
|
K3 |
|
|
K4 |
|
|
|
Y2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
P L C (Input) |
|
|
|
|
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
Y2 |
|
|
Y3 |
|
Y3 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0В

19
Задача №23 «а». Алгоритм керування системою (привод 2 та гідромотор 3, елемент пам’яті «7», проміжний датчик «6») мова STL
STEP 0 «Перехід системи в початковий стан»
IF |
NOP |
THEN |
RESET Y2 |
|
SET YN2 (підйом схвата) |
|
RESET Y3 (зупинка основного руху шасі) |
|
RESET YN3 (зупинка реверсного руху шасі) |
|
RESET Y6 (вимкнення проміжного датчика) |
|
RESET X7 |
|
SET XN7 |
|
RESET XT1 |
|
RESET XT2 |
|
RESET XT7 |
|
RESET XNT7 |
|
RESET FS1 |
|
RESET Xst |
|
RESET X3 |
|
RESET XN3 |
IF |
XN2 |
THEN |
RESET YN2 |
|
JMP TO 1 |
STEP 1 «Основний крок програми» |
|
“запам’ятовування короткочасних сигналів” |
|
IF |
KNOP |
THEN |
SET XN3 |
IF |
SENS |
THEN |
SET X3 |
“вмикання – вимикання системи за сигналом S1 ” |
|
IF |
S1 AND N FS1 |
THEN |
SET Xst |
IF |
N S1 AND Xst |
THEN |
SET FS1 |
IF |
S1 AND FS1 |
THEN |
RESET Xst |
IF |
N S1 AND N Xst |
THEN |
RESET FS1 |
“Модуль №2” (опускання - підйом)
IF |
XN3 AND XN7 AND XN6 AND Xst OR |
|
X3 AND X6 AND X7 AND N X2M |
THEN |
SET Y2 |
IF |
Y2 AND (X2M OR X2) |
THEN |
RESET Y2 |
IF |
XN3 AND X7 AND XN6 OR |
|
X3 AND X6 AND XN7 |
THEN |
SET YN2 |
IF |
YN2 AND XN2 |
THEN |
RESET YN2 |
“Модуль №3” (рух шасі) |
|
IF |
XN2 AND X7 |
THEN |
SET Y3 |
|
RESET XN3 |
IF |
Y3 AND X3 |
THEN |
RESET Y3 |
IF |
XN2 AND XN7 |
THEN |
SET YN3 |
|
RESET X3 |
IF |
YN3 AND XN3 |
THEN |
RESET YN3 |
“Модуль №6” (вмикання проміжного датчика) |
|
IF |
XN2 AND X7 |
THEN |
SET Y6 |
|
SET X6 |
|
RESET XN6 |
IF |
XN2 AND XN7 |
THEN |
RESET Y6 |
|
SET XN6 |
|
RESET X6 |
“Модуль №7” (елемент пам’яті) |
|
IF |
X2 AND XN3 |
THEN |
SET XT7 |
|
RESET XNT7 |
IF |
X2 AND X3 |
THEN |
RESET XT7 |
|
SET XNT7 |