

4. Вибір комплектних електроприводів ланок
4.1. Визначення основних параметрів суеп
Силовий перетворювач, що живить двигун, повинен забезпечувати не-обхідні значення максимальної напруги в ланці постійного струму
 ,
тривалого струму
,
тривалого струму
 і максимального струму навантаження
і максимального струму навантаження .
.
Максимальна напруга перетворювача:
 ,
( 4.1 )
,
( 4.1 )
де
 ,
, – максимальне значення швидкості і
моменту на валу двигуна.
– максимальне значення швидкості і
моменту на валу двигуна.
Визначимо значення конструктивного коефіцієнта вентильного двигуна по моменту і по ЕРС
 ,
( 4.2 )
,
( 4.2 )
де

 –
відповідно тривалий момент і відповідний
йому струм двигуна.
–
відповідно тривалий момент і відповідний
йому струм двигуна.
Визначимо значення конструктивного коефіцієнта вентильного двигуна Д1
 Нм/А;
Нм/А;
Визначимо значення конструктивного коефіцієнта вентильного двигуна Д2
 Нм/А;
Нм/А;
Визначимо значення максимальної напруги перетворювача для вентильного двигуна Д1
 ;
;
Визначимо значення максимальної напруги перетворювача для вентильного двигуна Д2
 ;
;
Тривалий випрямлений струм перетворювача:
 ,
( 4.3 )
,
( 4.3 )
де
 – еквівалентний момент на валу двигуна
за цикл роботи;
– еквівалентний момент на валу двигуна
за цикл роботи;
Визначимо значення тривалого випрямленого струму перетворювача для вентильного двигуна Д1
 ;
;
 ;
;
Ток перевантаження повинен задовольняти співвідношенню
 ,
,
где
 – струм, який відповідає максимальному
моменту двигуна;
– струм, який відповідає максимальному
моменту двигуна;
 ;
;
 ;
;
Остаточно отримуємо:
 ;
;
 ;
; ;
;
 ;
;
 ;
; .
.
4.2. Вибір комплектних електроприводів серії епб-2
Для обраних вентильних двигунів вибираємо комплектні електроприводи серії ЕПБ-2
Для першої ланки:
Блок живлення серії БС 9803-355
 ;
;
 ;
; ;
;
Блок регулювання серії БС 4102-345
 ;
;
 ;
; ;
;
Для другої ланки:
Блок живлення серії БС 9803-355
 ;
;
 ;
; ;
;
Блок регулювання серії БС 4102-345
 ;
;
 ;
; ;
;
Структурна схема одноконтурної СУЕП на базі ЕПБ2 наведена на рис. 4.1.

Рис. 4.1. Структурна схема одноконтурної СУЕП на базі ЕПБ-2
4.3. Синтез параметрів суеп для 1-ї ланки маніпулятора
Визначити максимальну кутову швидкість вала двигуна:

де nmax= об/хв. – максимальна частота обертання вала

Визначаємо значення конструктивного коефіцієнта по ЕРС:


Визначаємо коефіцієнт датчика швидкості:

Визначаємо коефіцієнт датчика струму:

Визначаємо конструктивний коефіцієнт двигуна:


Визначаємо сумарний момент інерції:

 кгм2
кгм2
Вибираємо
 :
:





4.4. Синтез параметрів суеп для 2-го ланки маніпулятора
Визначити максимальну кутову швидкість вала двигуна:

де nmax= об/хв. – максимальна частота обертання вала

Визначаємо значення конструктивного коефіцієнта по ЕРС:


Визначаємо коефіцієнт датчика швидкості:

Визначаємо коефіцієнт датчика струму:

Визначаємо конструктивний коефіцієнт двигуна:


Визначаємо сумарний момент інерції:

 кгм2
кгм2
Вибираємо
 :
:





4.4 Моделювання суеп
Блок-схема моделі 2-координатного ЕП 2-ланками маніпулятора на базі ЕПБ-2 показана на рис.4.2.

Рис. 4.2. Блок-схема моделі 2-координатного ЕП 2-ланками маніпулятора на базі ЕПБ-2
На рис.4.3 і рис.4.4 показані діаграми руху 1-ї і 2-ї ланок маніпулятора. Там же показані задані діаграми руху 1-ї і 2-їзвеньев. Так на рис.4.3, а і рис.4.4, а показані задана і отримана за допомогою СУЕП ЕПБ2 діаграми переміщення відповідно 1-ї і 2-ї ланок маніпулятора. Видно, що вони настільки збігаються, що їх важко розрізнити.
Так на рис.4.3, б і рис.4.4, б показані задана і отримана за допомогою СУЕП ЕПБ2 діаграми швидкості переміщення відповідно 1-ї і 2-ї ланок маніпулятора. Вони також досить повно збігаються, але відмінності між ними більш помітні.

Рис.4.3. Діаграми руху 1-ї ланки
Так на рис.4.3, в і рис.4.4, в показані задана і отримана за допомогою СУЕП ЕПБ2 діаграми прискорення з яким переміщуються відповідно 1-ї і 2-ї ланок маніпулятора. Тут помітні відмінності між заданою і отриманої за допомогою СУЕП ЕПБ2 діаграмами прискорення. Частина з цих відмінностей обумовлена наявністю динамічної помилки, властивою системі регулювання швидкості, а частина наявністю динамічної помилки, обумовленої взаємним впливом ланок маніпулятора один на одного при їх русі.
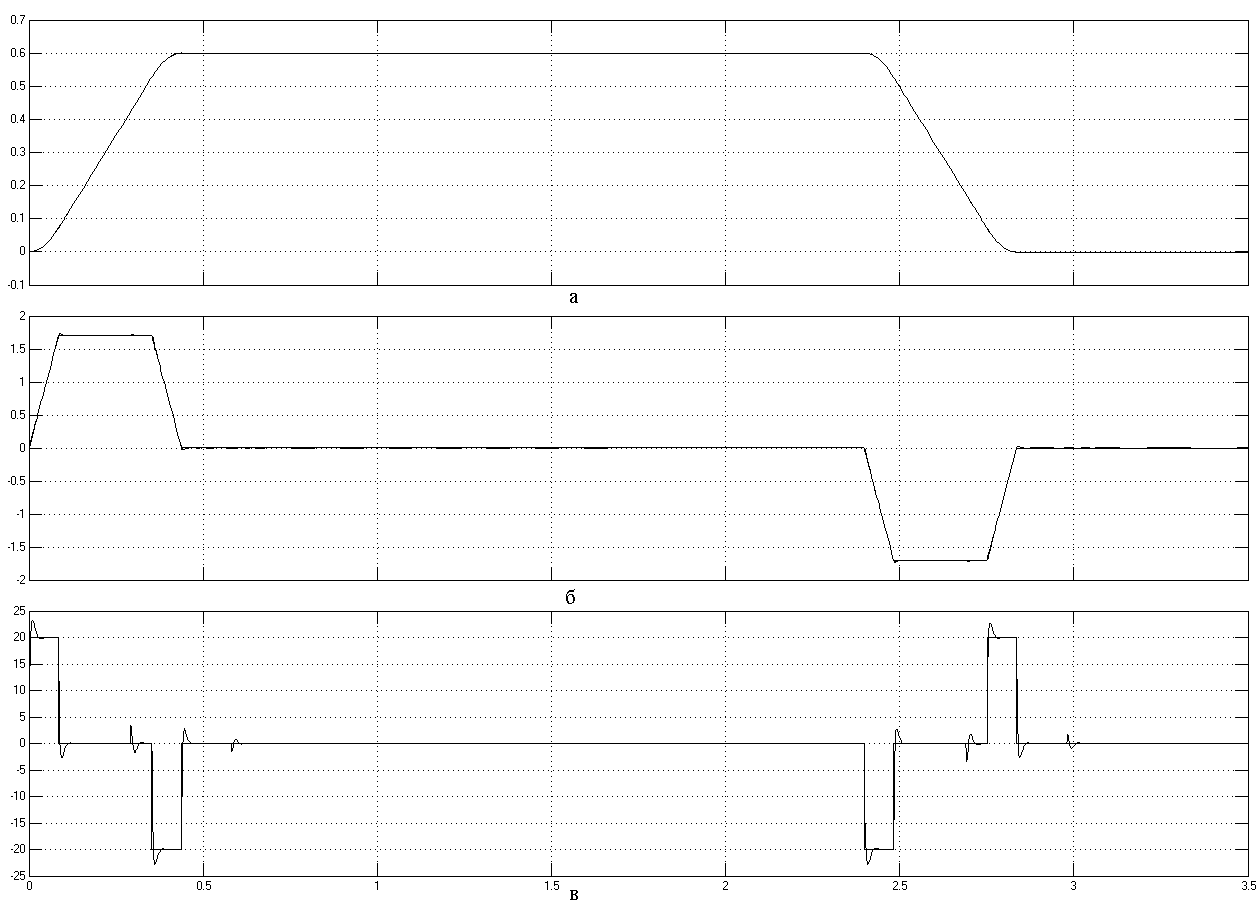
Рис.4.4. Діаграми руху 2-ї ланки
На рис. 4.5 і на рис. 4.6 показані діаграми сигналів завдання швидкості (а), завдання струму (б) і діаграма моменту (в) в СУЕП відповідно 1-ї і 2-ї ланки маніпулятора. З графіків (в) видно, що наявність взаємного впливу ланок маніпулятора один на одного при їх русі призводить до збільшення максимальних значень моментів, що розвиваються двигуном. Так максимальний момент, що розвивається двигуном Д1 збільшується від 51 НМ до 55 Нм. Максимальний момент, що розвивається двигуном Д2 збільшується від 65,4 НМ до 72 Нм.

Рис. 4.5. Діаграми сигналів завдання швидкості (а), завдання струму (б), діаграма моменту 1-ї ланки (в)

Рис.4.6. Діаграми сигналів завдання швидкості (а), завдання струму (б), діаграма моменту 2-ї ланки
Висновки
У четвертому розділі зроблено вибір комплектних електроприводів ланок. Проведено ряд розрахунків для визначення основних параметрів СУЕП. А також вибір комплектних електроприводів серії ЕПБ-2 і Синтез параметрів СУЕП для 1-ї та 2-ї ланки маніпулятора.
Провели моделювання СУЕП. Блок-схема моделі 2-координатного ЕП 2-ланками маніпулятора на базі ЕПБ-2 показана на рис.4.2.
На рис.4.3 і рис.4.4 показані діаграми руху 1-ї і 2-ї ланок маніпулятора. Там же показані задані діаграми руху 1-ї і 2-ї ланок. Так на рис.4.3, а і рис.4.4, а показані задана і отримана за допомогою СУЕП ЕПБ2 діаграми переміщення відповідно 1-ї і 2-ї ланок маніпулятора. Видно, що вони настільки збігаються, що їх важко розрізнити.
Так на рис.4.3, б і рис.4.4, б показані задана і отримана за допомогою СУЕП ЕПБ2 діаграми швидкості переміщення відповідно 1-ї і 2-ї ланок маніпулятора. Вони також досить повно збігаються, але відмінності між ними більш помітні.
Так на рис.4.3, в і рис.4.4, в показані задана і отримана за допомогою СУЕП ЕПБ2 діаграми прискорення з яким переміщуються відповідно 1-ї і 2-ї ланок маніпулятора. Тут помітні відмінності між заданою і отриманої за допомогою СУЕП ЕПБ2 діаграмами прискорення. Частина з цих відмінностей обумовлена наявністю динамічної помилки, властивою системі регулювання швидкості, а частина наявністю динамічної помилки, обумовленої взаємним впливом ланок маніпулятора один на одного при їх русі.
На рис. 4.5 і на рис. 4.6 показані діаграми сигналів завдання швидкості (а), завдання струму (б) і діаграма моменту (в) в СУЕП відповідно 1-ї і 2-ї ланки маніпулятора. З графіків (в) видно, що наявність взаємного впливу ланок маніпулятора один на одного при їх русі призводить до збільшення максимальних значень моментів, що розвиваються двигуном. Так максимальний момент, що розвивається двигуном Д1 збільшується від 51 НМ до 55 Нм. Максимальний момент, що розвивається двигуном Д2 збільшується від 65,4 НМ до 72 Нм.