

2.5. Розрахунок кінетичної енергії двигуна ліктя
Двигун
Д2 приводить в рух лікоть і розташований
в точці
 Координати двигуна на осі х і у:
Координати двигуна на осі х і у:
 ;
;
Проекції вектора швидкості двигуна ліктя на осі х і у:
 ;
;
Швидкість двигуна ліктя:
 =
= ;
;
Кінетична енергія двигуна ліктя:
 ;
;
Оскільки двигун плеча розташований в точці О1, і не переміщається, то його кінетична енергія дорівнює нулю.
2.6. Розрахунок потенційної енергії вантажу.
Потенційна енергія вантажу розраховується за формулою:
 ,
(2.5)
,
(2.5)
де
 (2.6 )
(2.6 )
Після підставки отримаємо:

 (2.7)
(2.7)
2.7. Розрахунок потенційної енергії ліктя.
Виберемо
точку масою
 , що знаходиться на відстані
, що знаходиться на відстані від точки
від точки ,
тоді за аналогією з вантажем отримаємо:
,
тоді за аналогією з вантажем отримаємо:

де

 -
щільність матеріалу ліктя;
-
щільність матеріалу ліктя;
 -
площа поперечного перерізу ліктя.
-
площа поперечного перерізу ліктя.
 ;
;
 ;
;
де
 приймемо рівним нулю.
приймемо рівним нулю.
2.8. Розрахунок потенційної енергії плеча.
Виберемо
точку маси
 , що знаходиться на відстані
, що знаходиться на відстані від точки
від точки ,
тоді отримаємо:
,
тоді отримаємо:
 ;
;
де
 ;
;
 ;
;
де
 приймемо рівним нулю.
приймемо рівним нулю.
2.9 Розрахунок потенційної енергії двигуна ліктя
Двигун
ліктя розташований в точці

 ;
;
 .
.
2.10 Рівняння узагальнених сил
Сумарна кінетична енергія маніпулятора:
 ;
;
Сумарна потенційна енергія маніпулятора:
 .
.
Стосовно до дволанковий ПР отримуємо два рівняння узагальнених сил:
 ;
;
 ;
;
 ;
;

 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
(2.8)
;
(2.8)
 .
(2.9)
.
(2.9)
Висновки
У другому розділі проведено висновок рівнянь узагальнених сил. Показано, що ланки роботів, їх механічні передачі та електричні двигуни являють собою систему матеріальних тіл, пов'язаних між собою жорсткими і пружними зв'язками. Поняття статичного і динамічного режимів, які зазвичай застосовують для одномасової наведеного ланки, для 2-х координатного електроприводу неприйнятні. Тут всі режими динамічні, більшою мірою обумовлені взаємним впливом ланок і електроприводів один на одного. І для вирішення цього завдання ми використовували рівняння Лагранжа 2-го роду.
Проведено розрахунки кінетичної енергії вантажу, кінетичної енергії ліктя, кінетичної енергії плеча маніпулятора, кінетичної енергії двигуна ліктя, потенційної енергії вантажу, потенційної енергії ліктя, потенційної енергії плеча, потенційної енергії двигуна ліктя. Записані рівняння узагальнених сил.
3. Вибір двигунів ланок маніпулятора
3.1. Розрахунок і побудова навантажувальних діаграм ланок
Підставляючи
чисельні значення мас і довжин ланок
 в отримані вирази узагальнених сил
(3.8; 3.9), отримаємо чисельні вираження
залежностей узагальнених сил
в отримані вирази узагальнених сил
(3.8; 3.9), отримаємо чисельні вираження
залежностей узагальнених сил від параметрів руху ланок
від параметрів руху ланок .
Підставляючи в ці вираження значення
.
Підставляючи в ці вираження значення для різних значень часу отримаємо
функції
для різних значень часу отримаємо
функції и
и
 – навантажувальні діаграми ланок.
– навантажувальні діаграми ланок.
У блок-схемі математичної моделі для розрахунку навантажувальних діа-грам двигунів ланок маніпулятора, представленої на рис. 3.1, були визначені моменти, що діють на осях ланок, для приведення яких до валу двигуна використовували формулу:
 ,
( 3.1 )
,
( 3.1 )
де
 – момент, приведений до валу двигуна
– момент, приведений до валу двигуна -ї
ланки ,Н*м;
-ї
ланки ,Н*м;
 –відповідно
передавальне відношення механічної
передачі i-ї ланки.
–відповідно
передавальне відношення механічної
передачі i-ї ланки.
Значення передавального відношення механічної передачі i-ї ланки визначаємо за формулою, виходячи з умови, що максимальної швидкості ланки маніпулятора відповідає максимальна швидкість вала двигуна
 ,
( 3.2)
,
( 3.2)
Оскільки при однаковій потужності двигунів меншу масу мають двигуни з більшою швидкістю, то будемо вибирати двигуни з максимальною швидкістю, рівній 314 рад / с. З урахуванням цього для першої ланки маніпулятора отримаємо:

для другої ланки маніпулятора отримаємо:

На
рис.3.2 для прикладу показана блок-схема
математичної моделі підсистеми Мd1,
призначеної для розрахунку навантажувальної
діаграми двигуна плеча маніпулятора
Д1. Графіки
 наведені на рис. 3.3.
наведені на рис. 3.3.

рис. 3.1 Блок-схема математичної моделі для розрахунку навантажувальних діа-грам двигунів ланок маніпулятора Д1 і Д2

Рис. 3.2 Блок-схема математичної моделі підсистеми Мd1, призначеної для розрахунку навантажувальної діаграми двигуна плеча маніпулятора Д1
Діаграми моменту розвивається двигуном 1-ї ланки (а) і 2-ї ланки (б) маніпулятора з урахуванням маси двигуна Д2, рівний 20 кг і моменту інерції якорів двигунів Д1 і Д2, рівному 3,83 10-3 кгм2 і ККД редукторів рівних 100%. представлені у вигляді графіка на рис. 3.3.
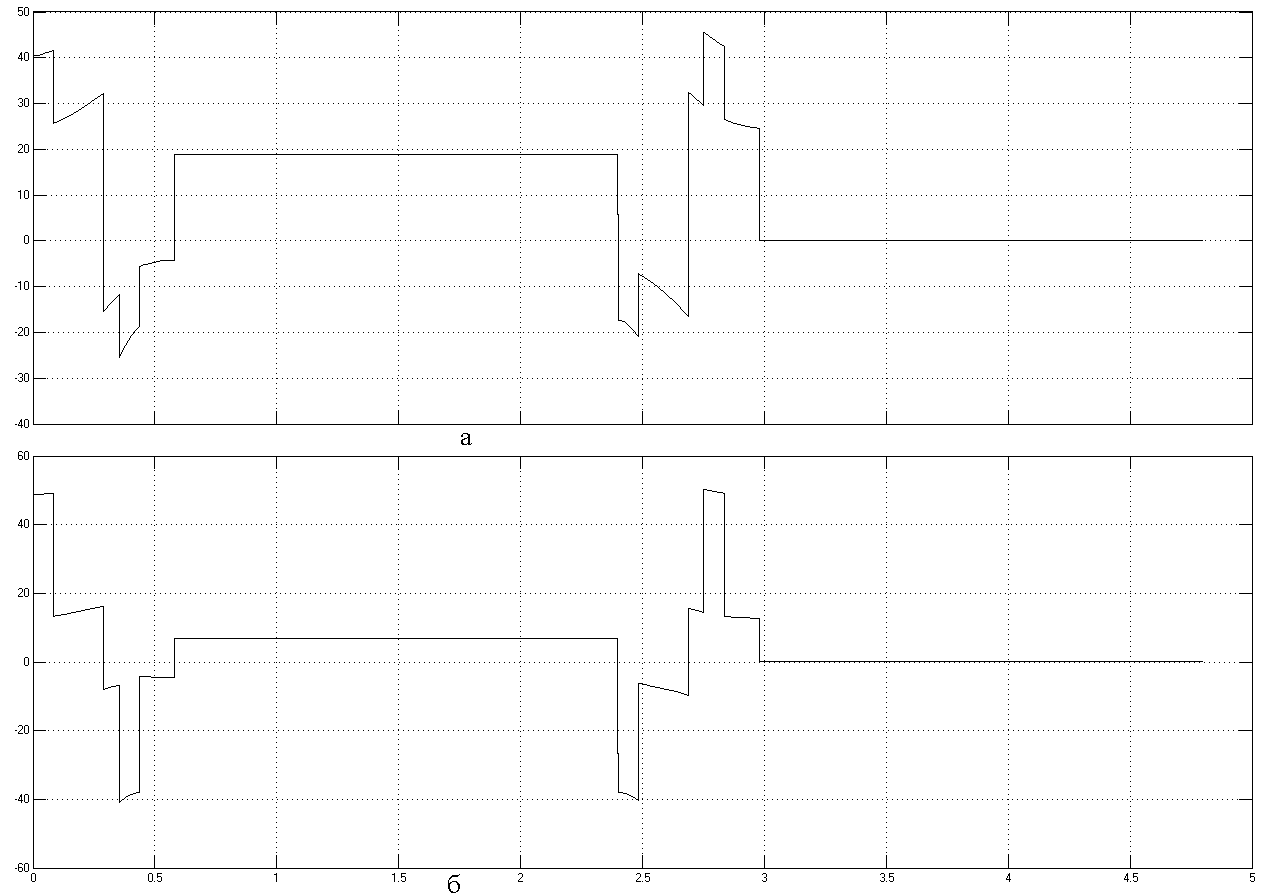
Рис. 3.3 Діаграми моменту розвивається двигуном 1-ї ланки (а) і 2-ї ланки (б) маніпулятора з урахуванням маси двигуна Д2, рівний 20 кг і моменту інерції якорів двигунів Д1 і Д2, рівному 3,83 10-3 кгм2 і ККД редукторів рівних 100%.