

Гіпербола.
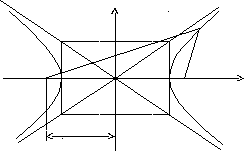
Визначення.Гіперболою називається множина точок площини, для яких модуль різниці відстаней від двох даних точок, що називаютьсяфокусами,є величина стала, менша відстані між фокусами.
у
M(x,y)
b
r1
r2
x
F1aF2
c
По визначенню r1–r2= 2a.F1,F2– фокуси гіперболи.F1F2= 2c.
Виберемо на гіперболі довільну точку М(х,у). Тоді:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
позначимо с2–а2=b2(геометрично ця величина – менша піввісь)
![]()
![]()

Одержали канонічне рівняння гіперболи.
Гіпербола симетрична щодо середини відрізка, що з'єднує фокуси й щодо осей координат.
Вісь 2аназивається дійсною віссю гіперболи.
Вісь 2bназивається уявною віссю гіперболи.
Г іпербола
має дві асимптоти, рівняння яких
іпербола
має дві асимптоти, рівняння яких![]()
Визначення.Відношення![]() називаєтьсяексцентриситетомгіперболи, дес– половина відстані між фокусами,а– дійсна піввісь.
називаєтьсяексцентриситетомгіперболи, дес– половина відстані між фокусами,а– дійсна піввісь.
З врахуванням того, що с2–а2=b2:
![]()
![]()
Якщо а=b,e=![]() ,
то гіпербола називаєтьсярівнобічною
(рівносторонньою).
,
то гіпербола називаєтьсярівнобічною
(рівносторонньою).
В изначення.Дві прямі, перпендикулярні дійсній осі
гіперболи й розташовані симетрично
щодо центра на відстаніa/eвід
нього, називаютьсядиректрисамигіперболи. Їх рівняння:
изначення.Дві прямі, перпендикулярні дійсній осі
гіперболи й розташовані симетрично
щодо центра на відстаніa/eвід
нього, називаютьсядиректрисамигіперболи. Їх рівняння:![]() .
.
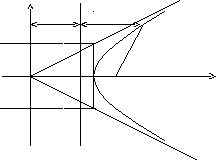
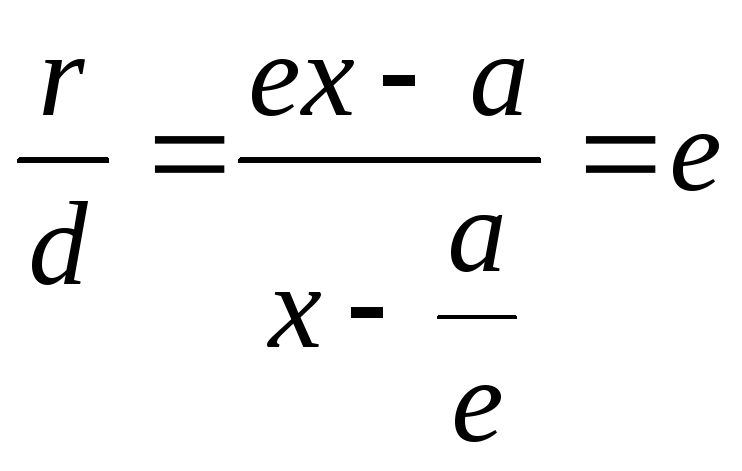
Теорема.Якщо r - відстань від довільної точки М гіперболи до якогось фокуса, d - відстань від тієї ж точки до відповідної цьому фокусу директриси, то відношення r/d - величина стала, рівна ексцентриситету.
Доведення.Зобразимо схематично гіперболу.
ya/ed
M(x,y)
r1
ОaF1x
OF1=c
З очевидних геометричних співвідношень можна записати:
a/e+d=x, отжеd=x–a/e.
(x–c)2+y2=r2
З канонічного рівняння:
![]() ,
з облікомb2=c2–a2:
,
з облікомb2=c2–a2:
![]()
![]()
![]()
Тоді тому що с/a=e, тоr=ex–a.
Разом:
 .
.
Для лівої гілки гіперболи доведення аналогічне. Теорему доведено.
Приклад.Знайти рівняння гіперболи,
вершини й фокуси якої перебувають у
відповідних вершинах і фокусах еліпса![]() .
.
Для еліпса: c2=a2–b2.
Для гіперболи: c2=a2+b2.

![]()
![]()
![]()
![]()
![]()
Рівняння
гіперболи:
![]() .
.
Приклад.Скласти рівняння гіперболи,
якщо її ексцентриситет дорівнює 2, а
фокуси збігаються з фокусами еліпса з
рівнянням![]()
Знаходимо фокусну відстань c2= 25 – 9 = 16.
Для гіперболи: c2=a2+b2= 16,e=c/a= 2;c= 2a;c2= 4a2;a2= 4;b2= 16 – 4 = 12.
Отже:
![]() – шукане рівняння гіперболи.
– шукане рівняння гіперболи.
Парабола.
Визначення.Параболоюназивається множина точок площини, кожна з яких перебуває на однаковій відстані від даної точки, названої фокусом, і від даної прямої, названої директрисою, такої що не проходить через фокус.
Розташуємо початок координат посередині між фокусом і директрисою.
 у
у
 АМ(х,у)
АМ(х,у)

ОFx


p/2p/2
Величина р(відстань від фокуса до директриси) називаєтьсяпараметром параболи. Виведемо канонічне рівняння параболи.
З геометричних співвідношень: AM=MF;AM=x+p/2;
MF2=y2+ (x–p/2) 2
(x+p/2) 2=y2+ (x–p/2) 2
x2+xp+p2/4 =y2+x2–xp+p2/4

y2= 2px
Рівняння директриси: x= –p/2.
Приклад.На параболіу2= 8хзнайти точку, відстань якої від директриси дорівнює 4.
З рівняння параболи одержуємо, що р= 4.
r=x+p/2 = 4; отже:
x= 2;y2= 16;y=4. Шукані точки:M1(2; 4),M2(2; –4).
Системи координат.
Будь-яка точка на площині може бути однозначно визначена за допомогою різних координатних систем, вибір яких визначається різними факторами. Спосіб задання початкових умов для розв’язання якої-небудь конкретної технічної задачі може визначити вибір тієї або іншої системи координат. Для зручності проведення обчислень часто краще використати системи координат, відмінні від декартової прямокутної системи. Крім того, наочність подання остаточної відповіді найчастіше теж сильно залежить від вибору системи координат. Нижче розглянемо деякі найбільше часто використовувані системи координат.