

10. Синтез сау. Регуляторы.
Под синтезом САУ понимают работу по расчету ее рациональной структуры и оптимальных параметров отдельных элементов. При решении задачи синтеза часть структуры системы, например, объект управления, регулирующие органы, средства измерения и т.д., известны. Неизвестной является регулирующая часть САУ. Задачей математического синтеза является определение оптимального, т.е. наилучшего в данных условиях, алгоритма или закона регулирования.
Для большинства используемых в тепловой автоматике САУ структура и алгоритмы регулирования известны. Например, САР уровня жидкости, так называемый трехимпульсный регулятор, реализующий пропорционально-интегральный закон, обеспечивает требуемое качество регулирования. В этом случае задача синтеза сводится к расчету параметров этого регулятора на основе характеристик конкретного объекта, регулирующих органов и т.д.
Такую задачу часто называют инженерным синтезом. Задачу инженерного синтеза можно считать завершенной, если расчет качества ожидаемого переходного процесса удовлетворяет требованиям к системе. Не исключены случаи, когда в рамках выбранной структуры это сделать не удается. Тогда приходится использовать дополнительные сигналы, например, возмущения, производимые от отклонения, использовать местные обратные связи, вводить корректирующие устройства.
Имея в наличии структуру, алгоритм и его численные параметры, можно решать третью задачу – техническую реализацию. В подавляющем большинстве случаев регулятор собирается из стандартных блоков, поэтому под синтезом понимают более узкую задачу – расчет корректирующих устройств САУ.
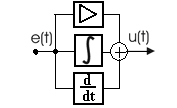
Рис. 18 Схема, иллюстрирующая принцип работы ПИД-регулятора.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины).
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
Пропорциональная составляющая
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен установленному, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к установленной, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь установленной, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегральная составляющая
Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая.
Дифференциальная составляющая
Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от установленной, тем сильнее противодействие, создаваемое дифференциальной составляющей.
Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется уставкой, а разность e = (x0 − x) — невязкой или рассогласованием.
Выходной сигнал регулятора u определяется тремя слагаемыми:

где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих регулятора, соответственно.
Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегральная и дифференциальная составляющие:

Часто в качестве параметров ПИД-регулятора используются:
относительный диапазон
![]()
постоянные интегрирования и дифференцирования, имеющие размерность времени
![]()
![]()
Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов.