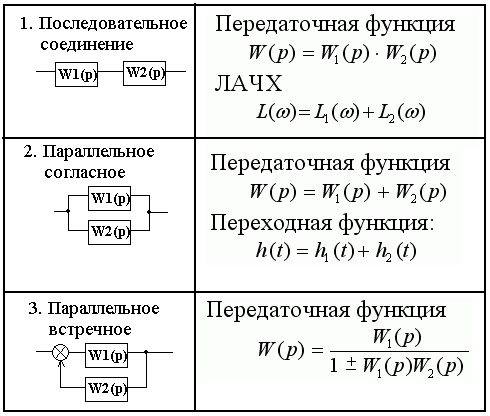
4. Соединение звеньев.
5. Преобразование структурных схем
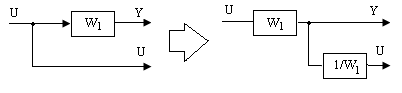
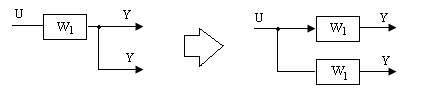
1. Перенос точки разветвления.
a) по ходу передачи сигнала
б) против хода информации
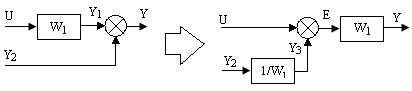
2. Перенос сумматора через звено.
а) по ходу передачи сигнала.

б) против хода
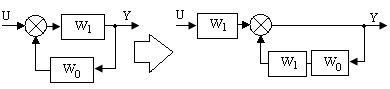
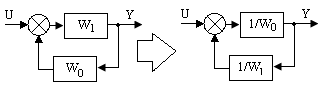
3. Вынос из встречно-параллельного соединения.
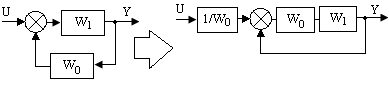
4. Вынос звена из обратной связи.
5. Перестановка звеньев во встречно-параллельном включении.
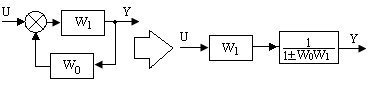
6. Замена встречно-параллельного соединения последовательным.
6. Частотные характеристики
Частотная передаточная функция получается из обычной заменой оператора Лапласа s (или р) на комплексную частоту j, т.е. в результате перехода от изображения Лапласа к изображению Фурье.
Дифференциальное уравнение движения системы связывает входной и выходной сигналы (т.е. функции времени), передаточная функция связывает изображения Лапласа тех же сигналов, а частотная ПФ связывает их спектры.
Частотная передаточная функция может быть представлена в следующих видах:
W(j) = A() e j(), или W(j) = U() + jV() ;
где:
A() - модуль частотной передаточной функции - находится как отношение модулей числителя и знаменателя:
() - фаза частотной передаточной функции - находится как разность аргументов числителя и знаменателя:
U() и V() - вещественная и мнимая части частотной ПФ. Для их нахождения необходимо избавиться от мнимости в знаменателе, умножением на сопряженную знаменателю комплексную величину.
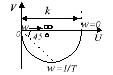
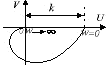
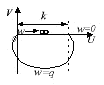
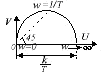
Амплитудно-фазовая характеристика (годограф Найквиста)
Это геометрическое место точек, которые описывает конец вектора частотной передаточной функции, при изменении частоты от 0 до +∞. Величина отрезка от начала координат до каждой точки годографа показывает во сколько раз на данной частоте выходной сигнал больше входного, а сдвиг фазы между сигналами определяется углом до упомянутого отрезка.
Р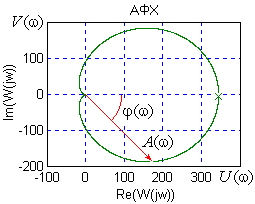 ис.
6 Пример АФХ или годографа Найквиста.
ис.
6 Пример АФХ или годографа Найквиста.
Из АФХ получаются все другие частотные зависимости:
U() - четная (для замкнутых САР P());
V() - нечетная;
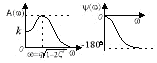
A() - четная (АЧХ);
() - нечетная (ФЧХ);
ЛАЧХ & ЛФЧХ - используются наиболее часто.
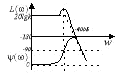
Логарифмические частотные характеристики.
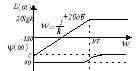
Логарифмические частотные характеристики (ЛЧХ) включают в себя построенные отдельно на одной плоскости логарифмическую амплитудную характеристику (ЛАЧХ) и логарифмическую фазовую характеристику (ЛФЧХ). Построение ЛАЧХ & ЛФЧХ производится по выражениям:
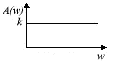
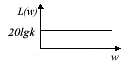
L() = 20 lg |W(j)| = 20 lg A(), [дБ];
() = arg(W(j)), [рад].
Величина L() выражается в децибелах. Бел представляет собой логарифмическую единицу, соответствующую десятикратному увеличению мощности. Один Бел соответствует увеличению мощности в 10 раз, 2 Бела – в 100 раз, 3 Бела – в 1000 раз и т.д. Децибел равен одной десятой части Бела.
Примеры АФЧХ, АЧХ, ФЧХ, ЛАЧХ и ЛФЧХ для типовых динамических звеньев приведены в таблице 2.
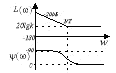
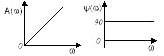
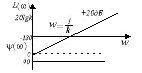
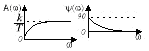
Таблица 2. Частотные характеристики типовых динамических звеньев.
|
Частотная переда-точная ф-ияW(jω) |
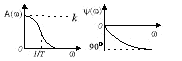
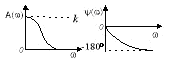
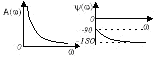
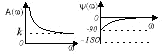
АЧХ, ФЧХ |
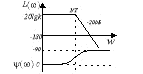
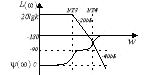
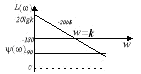
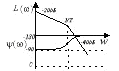
ЛАЧХ, ЛФЧХ |
АФЧХ |
|
1. Безынерционное
|
|
|
|
|
2.
Апериодическое 1-го порядка
|
|
|
|
|
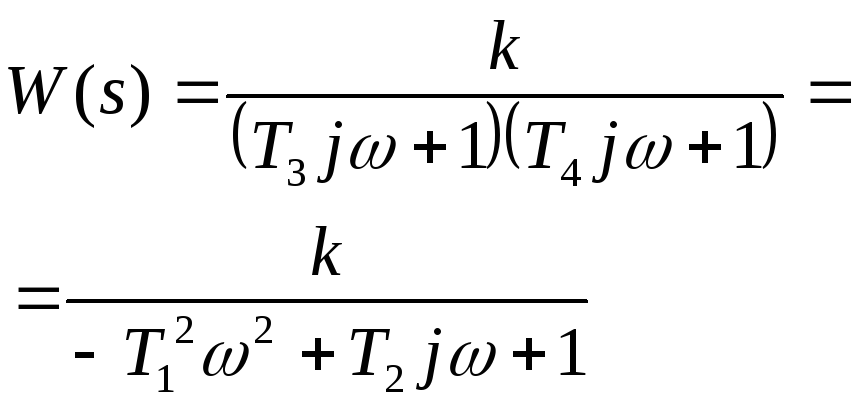
3.
Апериодическое 2-го порядка
|
|
|
|
|
4.
Колебательное
|
|
|
|
|
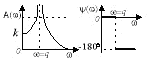
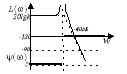
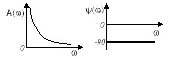
5.
Консервативное
|
|
|
|
|
6.
Идеальное интегрирующее
|
|
|
|
|
7.
Интегрирующее с замедлением
|
|
|
|
|
8. Изодромное
|
|
|
|
|
9.
Идеальное дифференцирующее
|
|
|
|
|
10.Дифференцирующее с замедлением
|
|
|
|