

учебное пособие
.pdf
|
|
|
|
|
|
|
|
|
|
|
-91- |
|
|
|
|
c1c2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
x1 |
Q 0; |
|
|
||||
|
|
|
|
|
|
||||||||
m1x1 |
c c |
2 |
|
x2 |
|
|
|||||||
|
|
1 |
|
|
|
|
|
|
, |
(5.2) |
|||
|
|
c1c2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||
|
|
x1 |
Q 0. |
|
|
||||||||
m2 x2 |
|
|
c2 |
|
x2 |
|
|
||||||
|
c1 |
|
|
|
|
|
|
|
|||||
где m1 и m2 – массы соударяющихся вагонов;
с – приведенная жесткость пружин поглощающего аппарата, т.е. жесткость пружин с учетом коэффициента передачи ψ. Он показывает во сколько раз усилие сжатия аппарата превышает усилие сжатия пружины (с = спр·ψ).
Поделим уравнения соответственно на m1 и m2, обоз-
начим |
с1 с2 |
CЭ и вычтем из второго уравнения первое. |
|
с1 с2 |
|||
|
|
При этом введём новую переменную z – представляющую сближение вагонов при соударении.
Вычитая из второго уравнения первое и введя нижеуказанные обозначения, получим окончательный вид уравнения, из которого определим сближение вагонов z.
z = x2 - x1.
По сближению установим, будет или не будет закрываться поглощающий аппарат. Разрешающее уравнение примет вид:
z b2 z a ,

-92-
|
1 |
1 |
|
|
m1 m2 |
|
|||
|
|
|
|
|
|
Q |
|
|
|
|
m |
|
m m |
|
; |
||||
где a Q m |
2 |
|
2 |
||||||
|
1 |
|
|
|
|
1 |
|
||
b2 CЭ m1 m2 . m1m2
Общий интеграл этого неоднородного уравнения: z Dp sin bt D2 cosbt ba2 .
Произвольные интегрирования D1 и D2 определяются из начальных условий, согласно которым при t=0, x1=0, x2=0 и
z=x2–x1=0; |
x1 1 , |
|
x2 2 |
и, |
следовательно, |
|
|
|
|
|
|
|
|
z x2 x1 . |
|
|
|
|
||
Тогда z |
|
sinbt |
a |
1 cosbt , |
|
(5.3) |
|
b2 |
|
||||
|
b |
|
|
|
||
a из уравнений (5.2) сила взаимодействия между вагонами:
F m1 x1 |
m2 x2 |
CЭ z Q |
CЭ |
sinbt Qcosbt. |
(5.4) |
||
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
При неограниченном ходе аппарата время полного его сжатия можно найти из условия z 0 , т.е. согласно (5.3) скорость сближения равна 0.
cosbt a sinbt 0 |
, |
(5.5) |
b |
|
|
и тогда определим время t полного сближения:
t |
1 arctg b |
. |
(5.6) |
|
|
b |
a |
|
|
-93-
Если при этом значение сжатия z аппаратов, рассчитанное по формуле (5.3), будет меньше или равно двойному ходу 2hапп., то, подставив его в формулу (5.4), найдём силу, соответствующую моменту сжатия.
Наиболее распространенными поглощающими аппаратами, до сих пор использующимися при оборудовании вагонов-цистерн, являются аппараты типа Ш-2-В.
Примем следующие исходные данные для оценки этой конструкции:
-жесткость пружин поглощающего аппарата спр = 2,5 МН/м;
-коэффициент передачи усилия при сжатии ψ = 6,2;
-величина начальной затяжки x0 = 0,015 м;
-допустимый ход поглощающего аппарата hапп. = 0,09 м;
-скорость соударения Δν = 3,0 м/с.
Произведем расчет.
1. Условно примем, что соударяются однотипные вагоны, тогда масса этих вагонов применительно к рассматриваемой конструкции составит:
m1 = m2 = P + T = 60 + 24 = 84 т.
2.Найдем приведенную жесткость пружин аппарата:
с= спр·ψ = 2,5·6,2 = 15,5 МН/м.

-94-
3. Определим усилие начальной затяжки:
Q = c·x0 = 15,5·0,015=0,233 МН = 233 кН,
что очень близко к величине, указанной на силовой характеристике рис. 5.2 (точка А).
Рис. 5.2 Силовая характеристика аппарата Ш-2-В 4. Вычислим эквивалентную жесткость двух соударя-
ющихсяпоглощающихаппаратовприусловиииходнотипности:
C |
Э |
|
с2 |
|
|
15,52 |
7,75 МН / м 7750 кН / м. |
|
с |
с |
15,5 15,5 |
||||||
|
|
|
|
5. Найдем коэффициенты уравнений а и b:
a Q m1 m2 |
233 |
84 84 |
5,548; |
|
m m |
2 |
|
84 84 |
|
1 |
|
|
|
|
|
|
|
|
|
|
-95- |
|
b C |
Э |
m1 m2 |
|
7750 |
84 84 |
13,58. |
|
|
m m |
2 |
|
|
84 84 |
|
|
|
|
1 |
|
|
|
|
|
6. Тогда время полного сближения составит: t 1b arctg ab 13,581 arctg 135,548,58 3 0,106 c.
7. Величина сближения вагонов при сжатии поглощающих аппаратов:
z b sinbt ba2 1 cosbt 133,58 sin(13,58 0,106)135,,548582 (1 cos(13,58 0,106)) 0,193 м.
Таким образом, ход каждого из рассмотренных поглощающих аппаратов h = z/2 = 0,193/2 = 0,0965 м.
8. Сила соударения вагонов определяется по формуле:
F = CЭ · min(z; 2hапп.) + Q = 7,75 · 0,18 + 0,233 = 1,63 МН.
Вывод: проверка характеристик пружинно-фрикционного поглощающего аппарата Ш-2-В показала, что при скорости соударения вагонов 3,0 м/с этот поглощающий аппарат закрывается (0,0965 > 0,09), в то время как сила соударения имеет допустимое значение.
Вариантом решения указанной проблемы может быть замена на исследуемом вагоне поглощающего аппарата Ш- 2-В на аппарат большей энергоемкости и хода, что в настоящее время и происходит (широко внедряются эластомерные поглощающие аппараты).
|
|
-96- |
|
|
|
|
|
5.2 |
Исследование кинематических особенностей |
||||||
взаимодействия автосцепок соседних вагонов |
|
|
|||||
|
Условия оценки соостветствия «Нормам…» |
|
|
||||
|
|
|
|
Таблица 5.1 |
|||
|
|
|
Расчетный радиус кривой для |
|
|||
Транспортная |
Расчетный участок |
|
вагонов, м |
|
|
||
операция |
пути |
Грузовых |
Пасса- |
|
|||
|
|
|
Группа I |
Группа II |
|
жирских |
|
Сцепление |
Участок сопряжения |
|
|
|
|
|
|
прямой и кривой без |
135 |
250 |
|
250 |
|
||
автоматическое |
|
|
|||||
переходного радиуса |
|
|
|
|
|
||
|
|
Участок сопряжения |
|
|
|
|
|
|
|
прямой и кривой без |
80 |
110 |
|
120 |
|
Проход в сцепе |
переходного радиуса |
|
|
|
|
|
|
|
|
S-образная кривая без |
120 |
160 |
|
170 |
|
|
|
прямой вставки |
|
|
|||
|
|
|
|
|
|
|
|
Проход |
оди- |
Круговая кривая |
60 |
60 |
|
80 |
|
ночного вагона |
|
|
|
|
|
|
|
К группе I относятся грузовые конструкции массовых типов, которые предназначены для использования на ж.д. путях России и могут распускаться с горок.
Группа II – грузовые, изотермические и специальные вагоны с длиной по осям сцепления более 21 метра.
5.2.1 Оценка обеспечения автоматической сцепляемости вагонов на участке сопряжения прямой и кривой без переходного радиуса
В соответствии с «Нормами…» обеспечение автоматической сцепляемости вагона на участке сопряжения кривой и прямой оценивается по условию:
|
|
|
|
-97- |
B |
n |
(2l n |
) l 2 |
(5.7) |
с |
с |
т , |
||
|
|
2R |
|
|
где nс – длина консоли от направляющего сечения до центра сцепления, nс=nк+аа=1,5+0,61=2,11 м;
nк – длина консоли вагона, м; nк = (2Lк-2l)/2; аа – вылет автосцепки, аа = 0,61 м;
2l – база вагона, 2l = 7,8 м;
lт – полубаза тележки, lт =0,925 м;
R – радиус кривой, м (принимается по табл. 5.1);
λ – дополнительное поперечное смещение центров зацепления автосцепок, согласно «Нормам…» для грузового вагона λ = 0,026 м.
Эффективная ширина захвата автосцепки В определяется по формуле:
ВВ/ 1,665 sin(65 0 ) 0,5
0,175 1,665 sin(65 2,55 ) 0,5 0,1708 м,
где В/ – полная ширина захвата автосцепки, для |
СА-3 |
||
В/=0,175 м; |
|
|
|
β0 – угол отклонения автосцепки: |
|
||
0 l nс 57,3 |
3,9 2,11 |
57,3 2,55 . |
|
R |
135 |
|
|
Воспользовавшись |
правой |
частью неравенства |
(5.7), |
определим смещение автосцепки относительно оси пути:
|
|
|
|
|
|
-98- |
|
нар |
n |
|
(2l n |
|
) l 2 |
2,11 (7,8 2,11) 0,9252 |
0,026 0,1003 м |
|
с |
|
с |
т |
2 135 |
||
|
|
|
2R |
|
|
||
Таким образом, в соответствии с неравненством (5.7) получаем условие: 0,1708 > 0,1003, т.е. автосцепка удовлетворяет выдвигаемым требованиям по автоматической сцепляемости на кривом участке пути.
5.2.2 Оценка обеспечения прохода сцепленных вагонов по кривым участкам пути регламентируемых радиусов
Согласно ей проверка обеспечения прохода сцепленных вагонов по криволинейным участкам пути производится для 3-х случаев взаимодействия ударно-тяговых устройств:
-проектируемый вагон в сцепе с "эталонным" вагоном на S-образной кривой;
-сцеп из 2-х проектируемых (однотипных) вагонов на S-образной кривой;
-проектируемый вагон в сцепе с "эталонным" вагоном на участке сопряжения кривой и прямой.
Для участка сопряжения прямой и кривой расчет производится по тем же формулам, но для "эталонного" вагона, расположенного на прямой, принимается R=∞.
За "эталонный" вагон принимается типовой 4-хосный
-99-
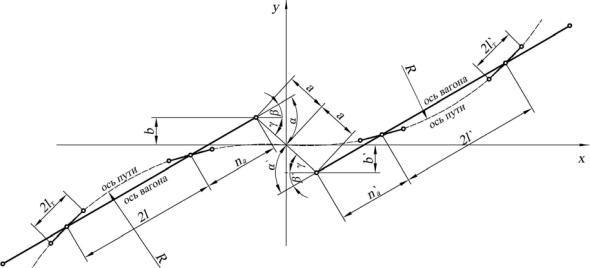
полувагон с базой 8,65 м, длиной консоли до оси сцепления 2,635 м, на тележках с базой 1,85 м. За расчетные критерии принимаются углы поперечного отклонения продольной оси автосцепки от оси вагона (рисунок 5.3), которые определяются для каждого вагона сцепа по формулам:
, |
(5.8) |
. |
(5.9) |
Углы α, α', β, β' и γ показаны на рисунке 5.3:
При наиболее неблагоприятном расположении вагонов
на S-образной кривой: |
|
|
||||||||
arctg |
l |
na |
a |
, |
|
(5.10) |
||||
|
|
|
R |
|
|
|||||
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
na a |
|
|
|||
|
|
arctg |
|
|
|
|
, |
(5.11) |
||
|
|
R |
|
|||||||
|
|
|
|
|||||||
arcsin b b |
, |
|
(5.12) |
|||||||
|
|
|
|
|
|
2a |
|
|
|
|
где 2l, 2l' – базы сцепленных вагонов;
na, nа' – длина консолей сцепленных вагонов от центра пятника до центра шарнира хвостовика автосцепки;
a – длина корпуса автосцепки от центра шарнира хвостовика до оси зацепления, для типовых сцепок СА-3
а = 0,87 м.
-100-
Рисунок 5.3 Проход сцепом вагонов S-образной кривой