

01
.pdf
|
|
|
|
|
1 |
|
|
1 |
|
||
|
|
|
|
|
|
|
|||||
sC |
|
rC |
CE |
|
l ; |
CE |
|
l; |
|||
|
2 |
2 |
|||||||||
sA |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
rA |
|
|
AE l sin ; |
AE l sin , |
||||||
окончательно получим
F 12 Pctg .
Задача 71 (рис. 112), (рис. 113)
Для заданного положения механизма, находящегося в состоянии равновесия,
установить зависимость между моментом пары сил М и силой Q, если ОА= b и О1С=СВ .
Рис. 112
Решение. рис.113
Воспользуемся принципом возможных перемещений.
Сообщим звену ОА возможное вращательное перемещение ОА .
Рисунок 113
181
Точки А,В и С получат возможное перемещение , , ; звено rA rВ rС
АВ и звено О1В – возможные вращательные перемещения АВ и О В |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
вокруг точек РАВ и О1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
На основании принципа возможных перемещений |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
M OA Q rC 0 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
M |
|
Q s |
C |
cos 00 |
0 , |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
OA |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Q M |
OA Mi . |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
sC |
|
|
|
|
|
|
|
|
|
|||
Передаточное отношение механизма |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
OA |
|
OA |
s |
|
s |
|
|
|
OA |
|
|
AP |
AB |
|
O1B O C |
|
2 |
|
|||||
i |
|
|
|
A |
|
B |
|
|
|
|
|
AB |
|
|
1 |
|
|
sin . |
|||||||
|
s |
|
s |
|
s |
OA |
|
|
|
BP |
|
|
O C |
|
|
||||||||||
|
s |
C |
A |
B |
C |
OA |
|
|
O C |
|
b |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
AB |
AB 1 |
|
|
|
||||||||||
1
Значение силы Q определяется по формуле
Q Mi 2 Mb sin .
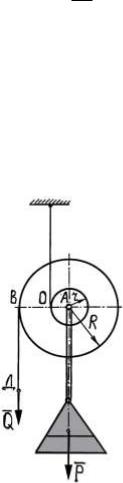
Задача 72 (рис. 114), (рис. 115)
Для подъема груза весом Р применяется двухступенчатый блок . Определить соотношение между силами Р и Q в случае равновесия системы.
Рисунок 114
182
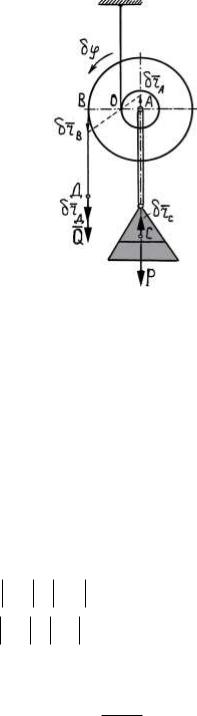
Решение. (рис. 115)
В основу решения положим принцип возможных перемещений.
Сообщим блоку возможное вращательное перемещение δφ вокруг возможной оси О .
Рисунок 115
|
|
|
|
|
|
|
|
|
|
Точки В, С, Д и К получат возможные перемещения rВ , rС ; |
rД ; rК , |
||||||||
|
|
|
|
|
|
|
|
|
|
груз – возможное поступательное перемещение r |
= rС . |
|
|
|
|||||
В соответствии с принципом возможных перемещений имеет место |
|
||||||||
уравнение |
|
|
|
|
|
|
|
|
|
|
|
|
Q s |
|
cos 0o P s cos180o 0 . |
|
|
||
Q r |
P r 0 |
K |
|
|
|||||
|
K |
C |
|
|
C |
|
|
|
|
С учетом зависимостей
sK rK
sC rC
окончательно получаем
rД sK ОД (R r) ;
rB sB ОB r ,
Q P r .
R r
183