

01
.pdfРисунок 99
Приложим к грузам силы тяжести и силы инерции
Ф1 Ф2 Ф3 Ф mа . Сообщим грузам возможное перемещение s .
Составим общее уравнение динамики:
mg s Ф1 s Ф2 s Ф3 s 0
или
mg 3Ф 0 .
Ускорение грузов : a g3 .
Применим принцип Даламбера к первому и третьему грузам
Рисунок 100
171
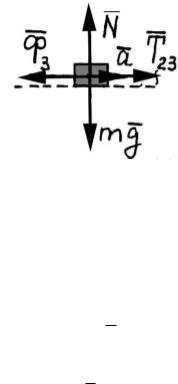
Рисунок 101
T12 mg Ф1 0; T23 Ф3 0.
Натяжения нитей в сечениях bc и de
T12 mg Ф1 23 mg ;
T23 Ф3 13 mg .
172
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
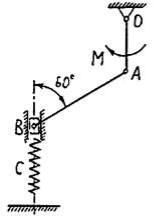
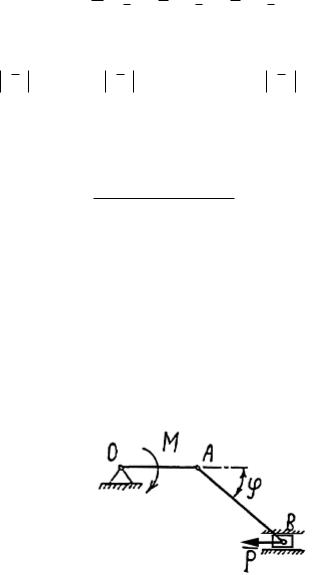
Задача 66 (рис. 102), (рис. 103)
Для механизма, расположенного в горизонтальной плоскости,
определить деформацию пружины в положении равновесия . Даны длина стержня ОА= l , момент пары сил M , приложенной к стержню ОА,
коэффициент жесткости пружины c .
Рисунок 102
Решение. (рис. 103)
Для решения задачи будем использовать принцип возможных перемещений.
Приложим к системе силы, действующие в горизонтальной плоскости:
кроме пары с моментом M это будет сила упругости пружины Fупр с х
( х искомая деформация пружины).
173
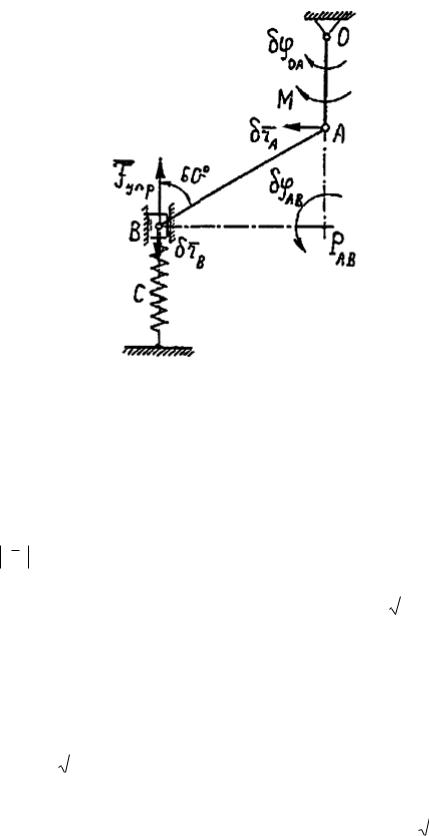
Рисунок 103
Сообщим системе возможное перемещение, повернув стержень ОА на угол ОА . Стержень АВ совершит возможное плоскопараллельное перемещение, повернувшись на угол АВ вокруг точки РАВ . Точки А и В получат возможные перемещения
sA rA OA ОА l ОА ;
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
r |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
sB |
|
rB |
BPAB АB BPAB |
tg60 l ОА |
3 l ОА . |
|||||||||
|
|
|
|
|
||||||||||
|
|
|
AP |
|
||||||||||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
AB |
|
|
|
||
Составим уравнение возможных работ всех активных сил (1.30)
М ОА Fупр sB 0 .
Подставив |
|
установленные |
ранее |
соотношения |
|||
|
|
|
|
|
|
|
|
М ОА с х 3 l ОА 0 . |
|
|
|
|
|
||
После преобразований получим деформацию пружины x |
|
M |
|||||
|
|
|
. |
||||
|
|
l c |
|||||
|
3 |
||||||
174
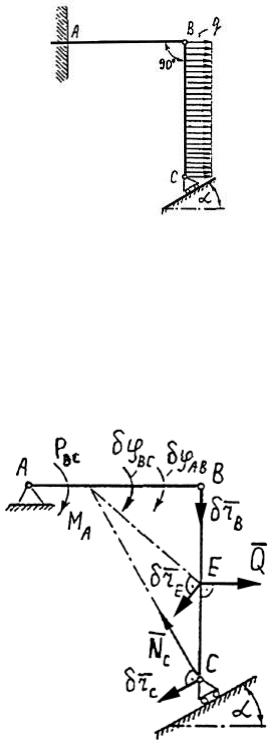
Задача 67 (рис. 104), (рис. 105)
Для заданной составной конструкции определить реактивный момент в заделке А, считая заданными интенсивность равномерно распределенной нагрузки q , угол , длины стержней АВ= l1 и ВС= l2 .
Рисунок 104
Решение. (рис. 105)
Для решения задачи используем принцип возможных перемещений.
Заменим заделку в точке А шарнирно неподвижной опорой,
компенсировав отброшенную связь ее реакцией – реактивной парой сил с неизвестным моментом М А .
Рисунок 105
175

Распределенную нагрузку на участке ВС заменим приложенной к точке
Е (ВЕ=ЕС= l22 ) равнодействующей силой Q ql2 .
Сообщим системе возможное перемещение, повернув стержень АВ на угол AB . Стержень ВС совершит возможное плоскопараллельное перемещение, повернувшись на угол BС вокруг точки РВС . Точки В, С и Е получат соответствующие возможные перемещения
|
|
|
|
|
|
|
|
|
|
|
|
|
AB AB l1 AB ; |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
rB |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EPBC |
l |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
EP |
|
|
EP |
|
rB |
|
|
|
|
|
|
; |
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
r |
BC |
AB |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
E |
|
|
BC |
|
|
|
|
BC |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BPBC |
|
|
BPBC |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CPBC |
l |
|
|
|||
|
|
|
|
|
|
|
|
CP |
|
|
CP |
|
|
rB |
|
|
|
|
|
. |
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
r |
|
|
|
BC |
|
|
|
|
AB |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
C |
|
|
BC |
|
|
|
|
BC |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BPBC |
|
|
BPBC |
|
|
|||||||||||
Уравнение возможных работ имеет вид
Ì À ÀÂ (Q BE) BC 0 .
Ì (Q BE) |
BC |
(Q BE) i |
À |
ÀÂ |
|
|
|
Далее находим
i |
BC |
|
BC |
SB |
|
BC |
|
|
AB AB |
|
AB |
|
|
l1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
tg |
||||||||||
|
ÀÂ |
|
S |
 |
ÀÂ |
|
BP |
ÂC |
|
|
|
ÀÂ |
|
BP |
|
l |
|||||
|
|
|
|
|
|
BC |
|
|
|
|
|
|
BC |
|
2 |
|
|||||
Окончательно получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Ì À |
(Q BE) i |
ql |
2l1ctg |
. |
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача 68 (рис. 106), (рис. 107)
Определить натяжение нити АС, связывающей вершины А и С шарнирного стержневого ромба ОАВС, находящегося под действием силы Р .
176

Рисунок106
Решение (рис.52)
Для решения задачи будем использовать принцип возможных перемещений.
Перережем нить, а ее действие заменим двумя приложенными в точках А и С равными силами Т А ТС Т .
Рисунок 107
Сообщим возможное вертикальное перемещение rB точке В; rÀ и rÑ -
возможное перемещение точек А и С. РАВ и РСВ - возможные центры поворота стержней АВ и СВ.
Составим зависимости
rB BPCB CB 2l cos CBrC rA CPCB CB l CB
На основании принципа возможных перемещений имеем уравнение
177
P rB TA rA TC rC 0 .
Выполним преобразования
P rB cos0 T rA cos( 90 ) T rC cos( 90 ) 0 .
P 2l cos CB 2T l sin CB 0 ,
Натяжение нити
T P 2l cos CB Pctg . 2l sin CB
Рисунок 108
Решение. (рис. 109)
Для решения задачи будем использовать принцип возможных перемещений.
Сообщим системе возможное перемещение, повернув кривошип ОА на возможный угол ОА . Шатун АВ совершит возможное плоскопараллельное перемещение, повернувшись на возможный угол АВ вокруг точки РАВ .
178
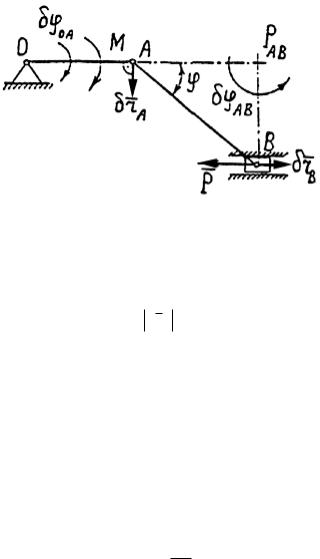
Рисунок 109
Уравнение возможных работ
М ОА Р rB cos180 0
Выполним преобразования
|
|
|
|
|
|
P Ì |
|
ÎÀ |
M i . |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
SB |
|
|
|
|
|
|
||
i |
ÎÀ |
|
ÎÀ |
|
S À |
|
|
ÎÀ |
|
APAB ÀB |
|
1 |
ctg |
||||||
S |
|
S |
|
S |
|
|
r |
|
|
||||||||||
|
B |
|
À |
|
B |
|
|
|
|
BP |
ÀB |
r |
|||||||
|
|
|
|
|
|
|
|
|
|
OÀ |
|
AB |
|
|
|||||
Значение силы Р определяется по формуле
Ð M i Ìr ñtg .
Задача 70 (рис. 110), (рис. 111)
Однородный стержень АВ длиной l и весом Р находится в состоянии равновесия в вертикальной плоскости. Стержень опирается на гладкий пол и гладкую вертикальную стену. Определить зависимость между силами Р и F.
179

Рисунок 110
Решение. (рис. 111)
Для решения задачи применим принцип возможных перемещений.
Сообщим точке А стержня возможное перемещение rA ; точка В
получит возможное перемещение rB , стержень – возможное вращательное перемещение δφ вокруг возможного центра поворота Е .
Рисунок 111
Составим общее уравнение статики:
P rC F rA 0
или
P sC cos F sA cos180o 0 .
Учитывая зависимости
180