

Лекция 15 грузоведущие конвейеры,винтовые конвейеры,
КОВШОВЫЕ КОНВЕЙЕРЫ
Грузоведущий конвейер - конвейер, у которого тяговый орган при помощи тяг, крюков, штырей или кулаков-толкателей перемещает штучные грузы на собственном колёсном ходу или на тележках, а также по настилу скольжением или качением по стационарным роликам
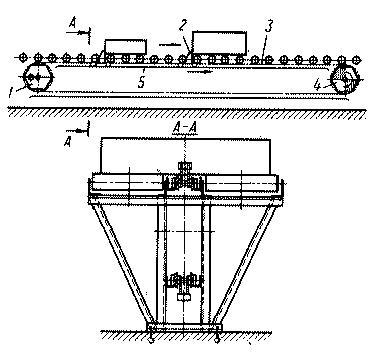
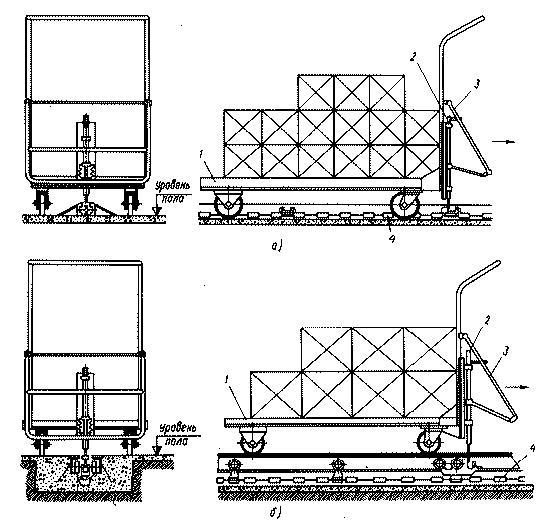
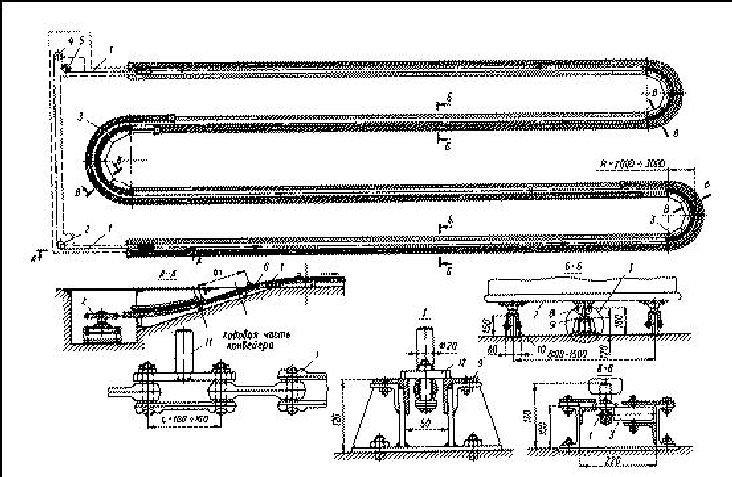
Рис. 24.3. Пространственный грузоведущий конвейер
Винтовые конвейеры
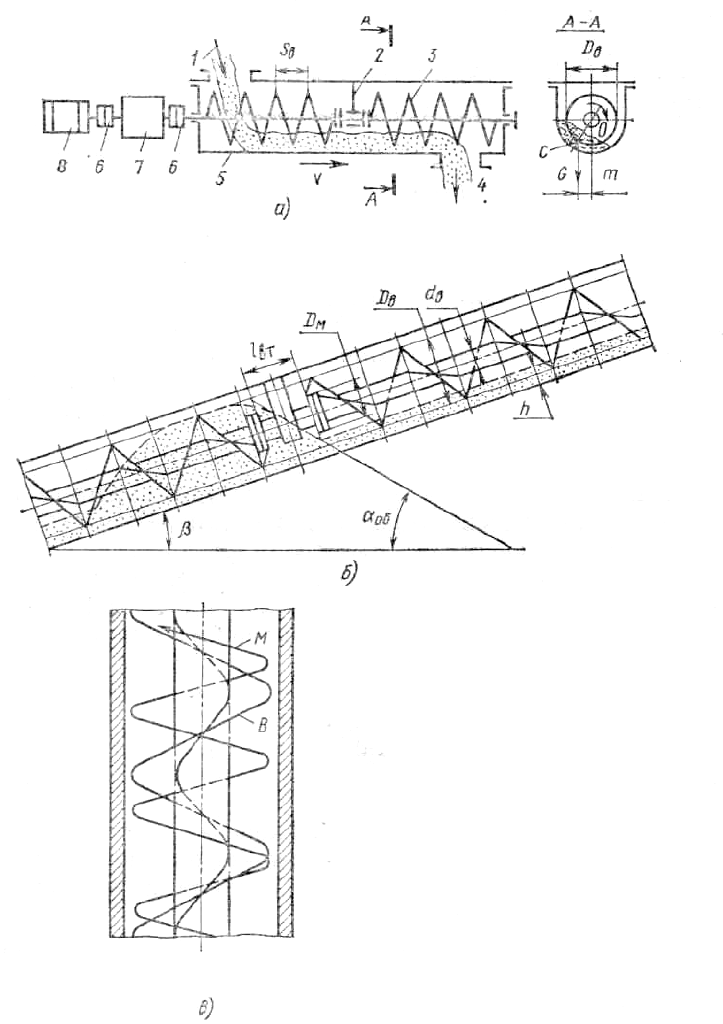
Рис. 25.1. Схемы винтовых конвейеров: а – горизонтального; б – наклонного; в – вертикального
. Определение производительности
Частота вращения, принимаемая для вертикальных винтовых конвейеров, зависит от диаметра винта: при диаметре, равном 150, 250, 400 и 500 мм, частота вращения составляет соответственно 210, 170, 140 и 80 об/мин.
Производительность (т/ч) горизонтальных и пологонаклонных винтовых конвейеров вычисляют по приближенной формуле
![]()
где nВ- в об/мин;t- шаг винта, м;r— насыпная плотность груза, т/м3;h - расчетная высота слоя движущегося груза, м.
Расчетная высота движущегося груза (см. рис. 1, в)
![]()
где lBT- расстояние между концами соседних витков в зоне подвесного подшипника;aОБ- угол обрушения сыпучего груза;
![]()
здесь f- коэффициент внутреннего трения груза.
Если значения lВТ,bиaОБнеизвестны, то производительность конвейера можно определить по формулеQ=rV, где объемная производительность (м3/ч)
![]()
здесь y- коэффициент наполнения желоба конвейера, имеющий следующие значения для конвейеров без подвесных подшипников: для легкоподвижных грузов (муки, зерна)y=0,45; для грузов средней подвижности (песка, мелкокусковой соли и угля)y=0,3; для тяжелых абразивных грузов (руды, гравия, золы)y=0,15.
Рис.
25.2. Вращающиеся транспортирующие трубы:
а – винтовая; б – гладкостенная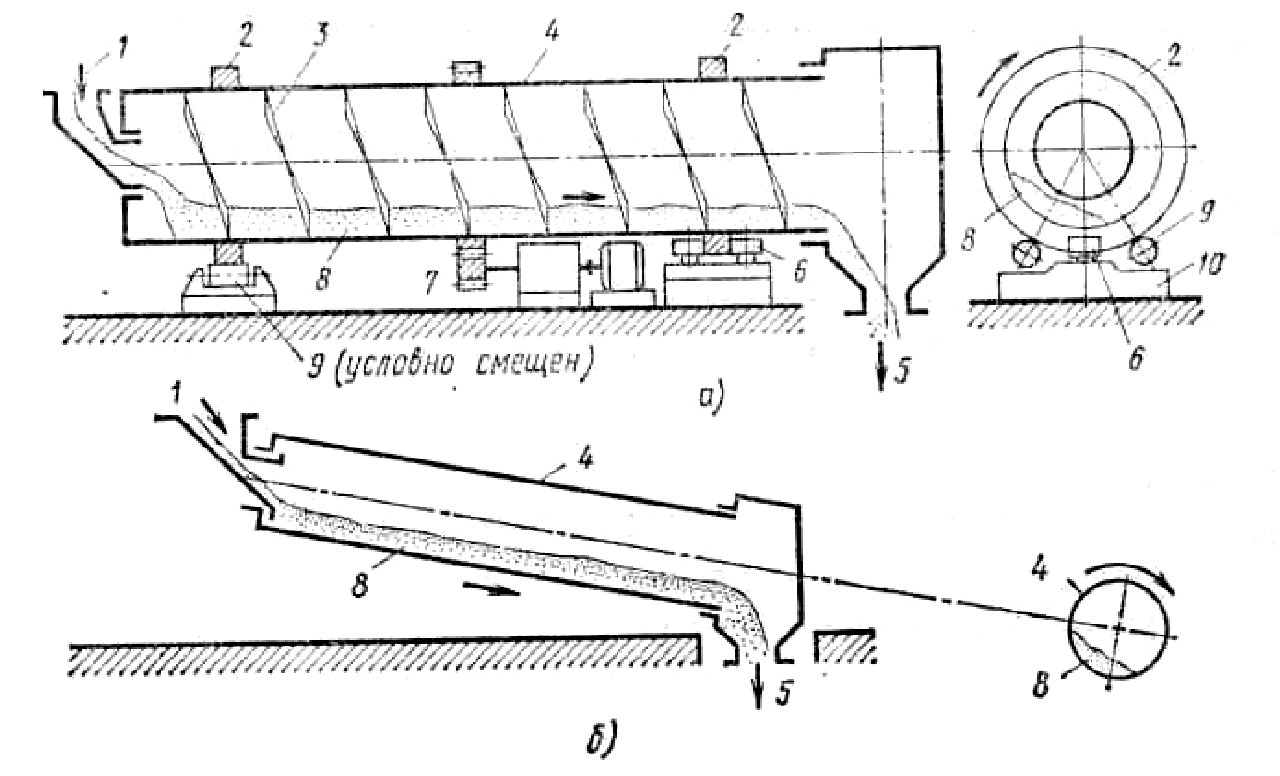
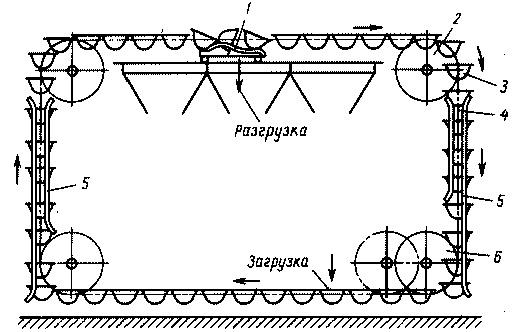
Рис. 26.1. Схема ковшевого конвейера: 1 - тяговая цепь; 2 - ковши; 3 - направляющие; 4 - приводная звёздочка; 5 - натяжная звёздочка; 6 - разгрузочное устройство
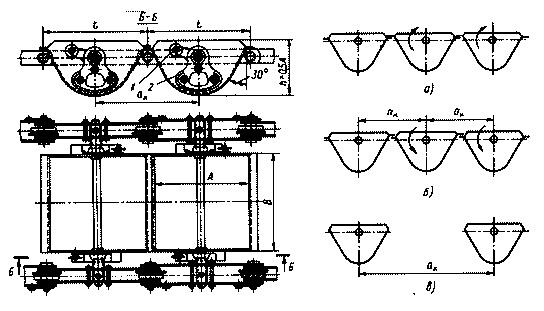
Рис. 26.2 Элементы ковшового конвейера
Лекция 16 подвесные канатные дороги
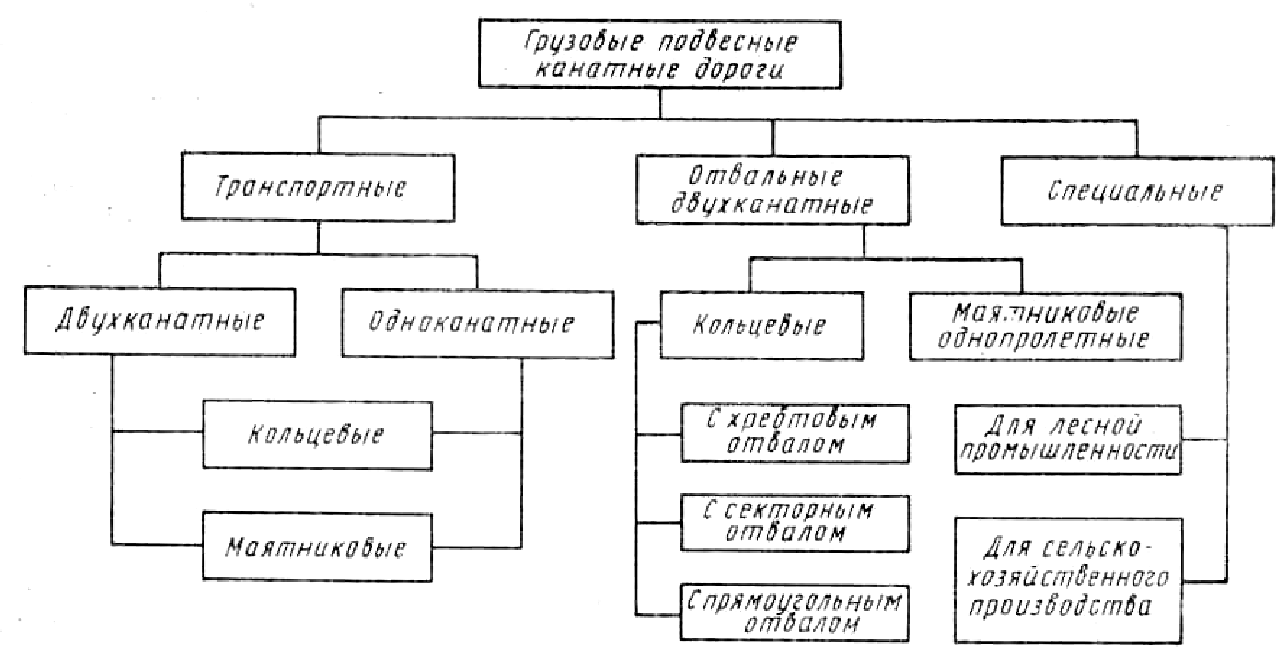
Рис. 27.1. Классификация грузовых подвесных канатных дорог
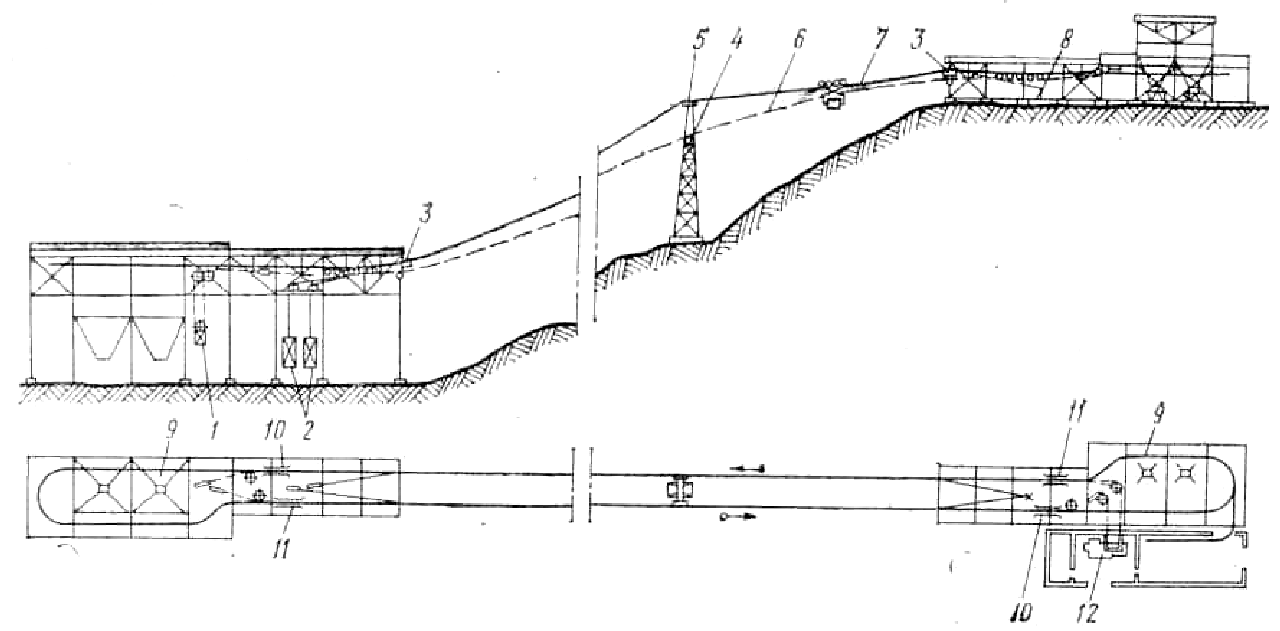
Рис. 27.2. Схема двухканатной дороги: 1 – контргруз тягового каната; 2 – контргрузы несущего каната; 3 – отклоняющий башмак; 4 – опорный поддерживающий ролик; 5 – опорный башмак; 6 – тяговый канат; 7 – несущий канат; 8 – устройство для заякоривания несущего каната; 9 – рельсовые пути; 10 – выключатель; 11 – включатель; 12 – привод
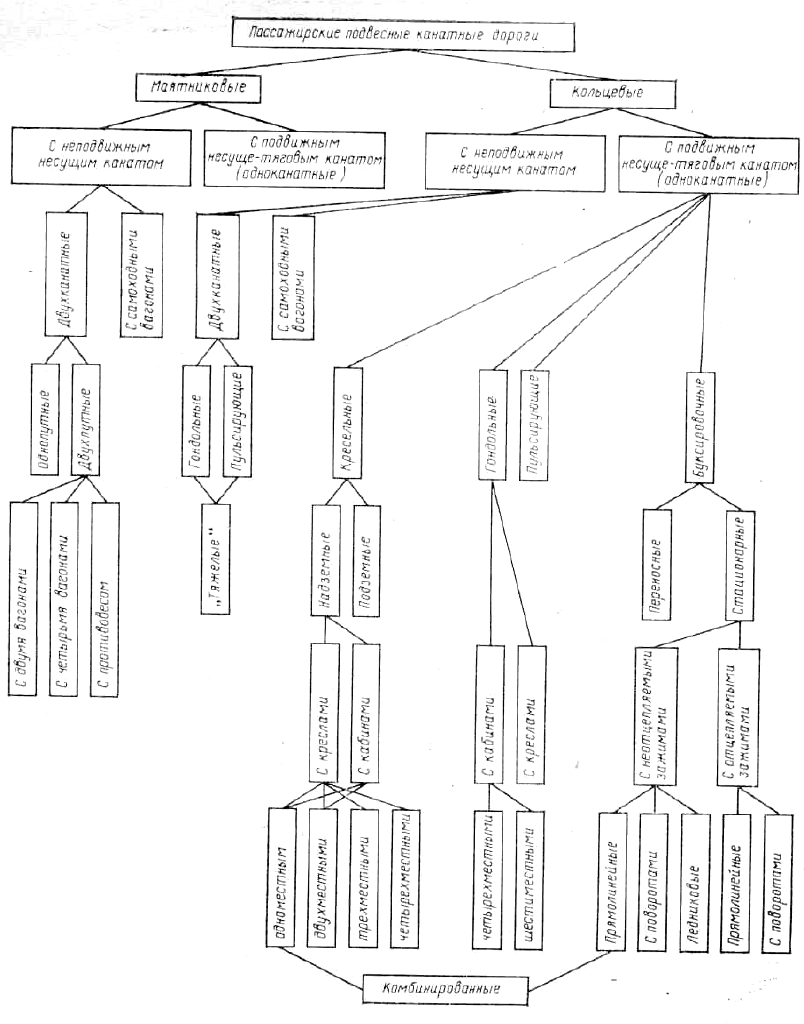
Рис. 28.1. Классификация пассажирских подвесных канатных дорог
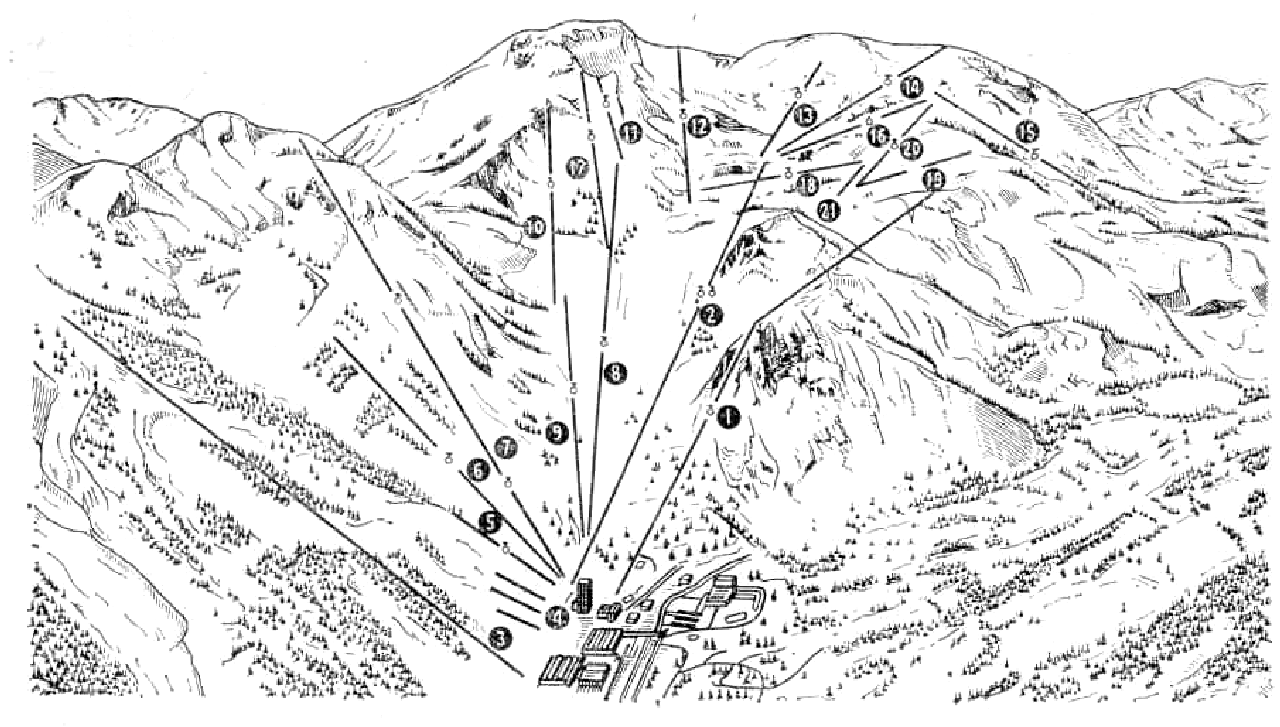
Рис. 28.2. Подвесные канатные дороги комплекса Скво-Велли: 1 – маятниковая; 2 – гондольная; 3 – с двухместными креслами; 4 – буксировочные типа «Пома» (6 шт.); 5..10 – с двухместными креслами; 11 – с одноместными креслами; 12..21 – с двухместными креслами
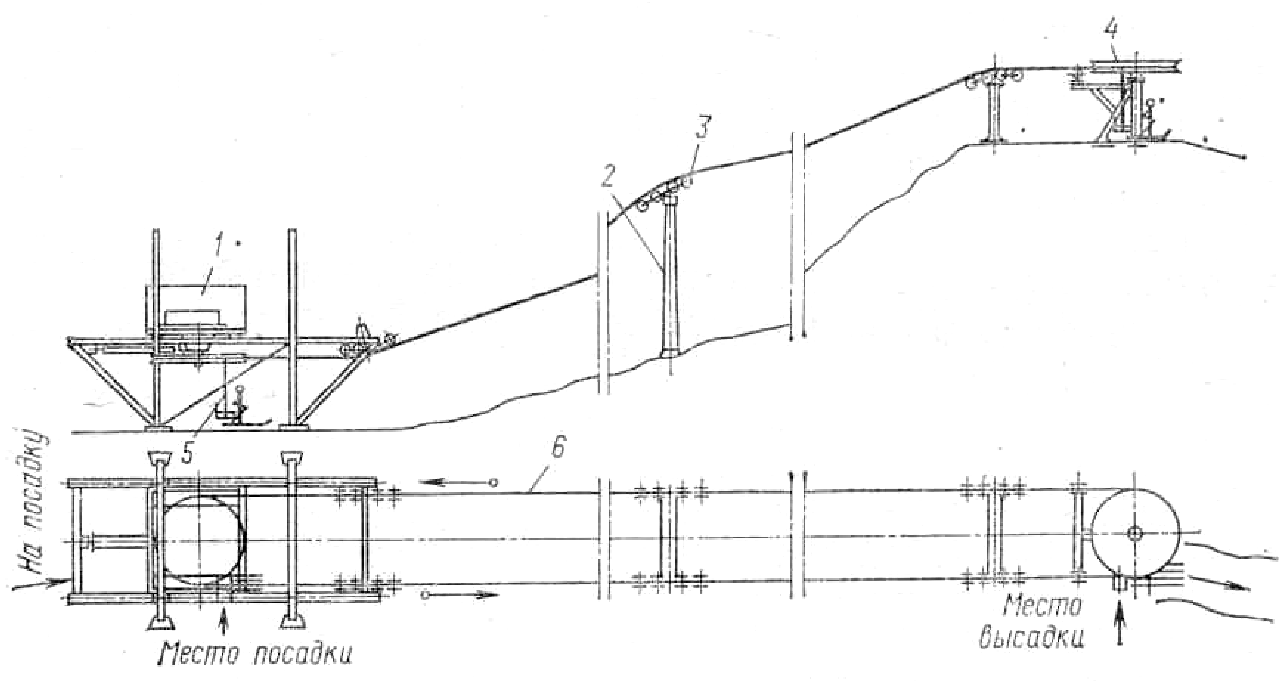
Рис. 28.3. Схема кресельной подвесной канатной дороги: 1 – нижняя конечная станция; 2 – опора с поддерживающими роликами; 3 – роликовые батареи; 4 – верхняя конечная станция
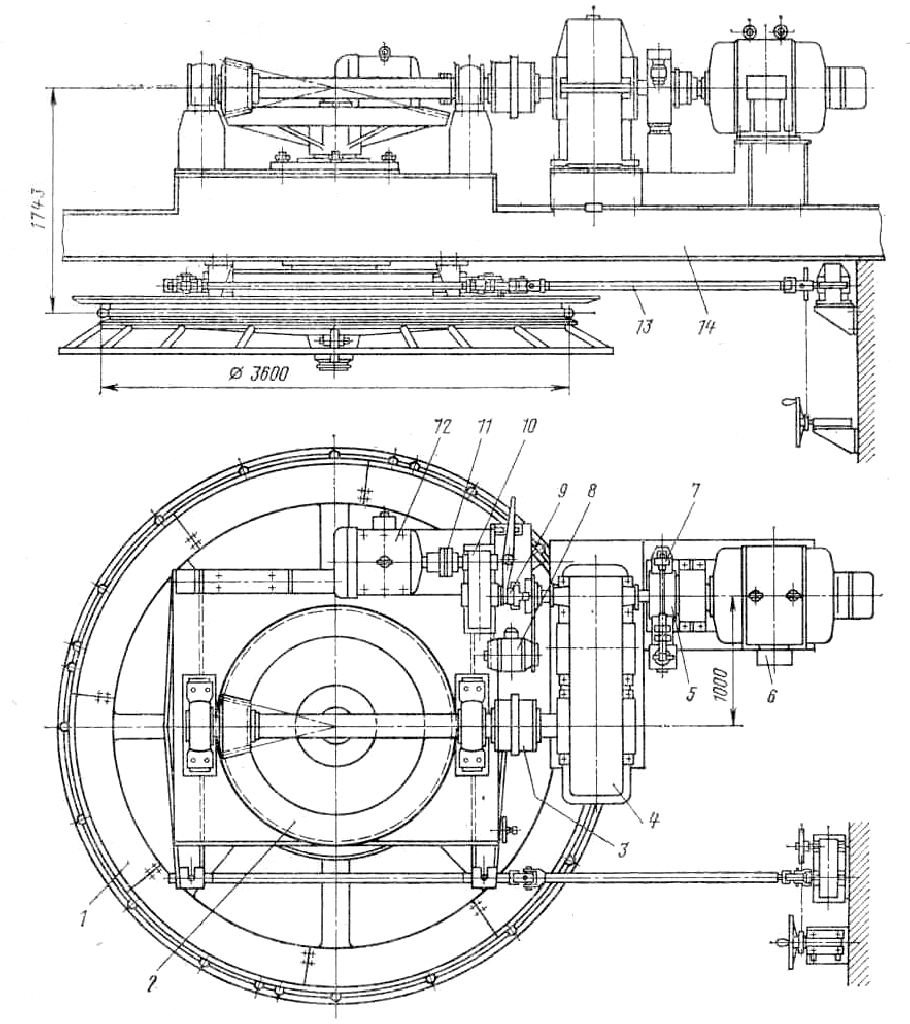
Рис. 28.4. Привод кресельной подвесной канатной дороги: 1 – приводной шкив; 2 – открытая коническая передача; 3 – зубчатая муфта; 4 – редуктор; 5 – упругая муфта; 6 – главный электродвигатель; 7 – рабочий тормоз; 8 – тахо-генератор; 9 – кулачковая муфта; 10 – редуктор микропривода; 11 – упругая муфта; 12 – резервный электродвигатель; 13 – ручной аварийный тормоз; 14 - рама
. Гравитационные устройства
В бункерных и транспортных установках широко применяют средства гравитационного (самотечного) транспорта, к которым относятся спускные желоба, лотки и трубы, каскадные и винтовые спуски. Гравитационные устройства предназначены для подачи насыпных грузов из бункеров и штучных грузов на погрузочных установках.
Распространенные на практике сечения лотков и желобов показаны на рис. 29.1, а-г. Рис. 29.1. Схемы спусковых устройств: а и б – стальные открытые полукруглый и прямоугольный желоба; в и г – деревянные открытые желоба; д и е – круглая и квадратная стальные трубы; ж – деревянная квадратная труба; з – стальной закрытый прямоугольный желоб; и – поворотный спуск
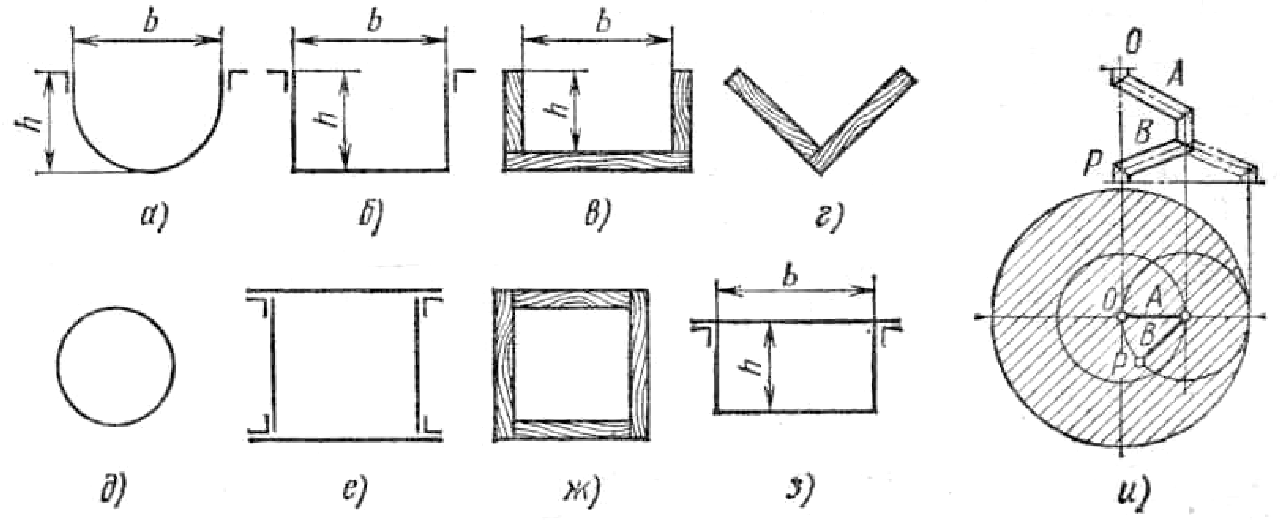
Рис.29.2. Схемы к расчету спускных устройств: а – винтовая поверхность с вертикальным бортом; б – то же с наклонной образующей; в – схема спускного устройства; г – схема определения угла поворота струи груза; д – схема определения высоты свободного падения частицы груза; е – схема определения скорости истечения наклонной струи; ж – составной желоб
РРо
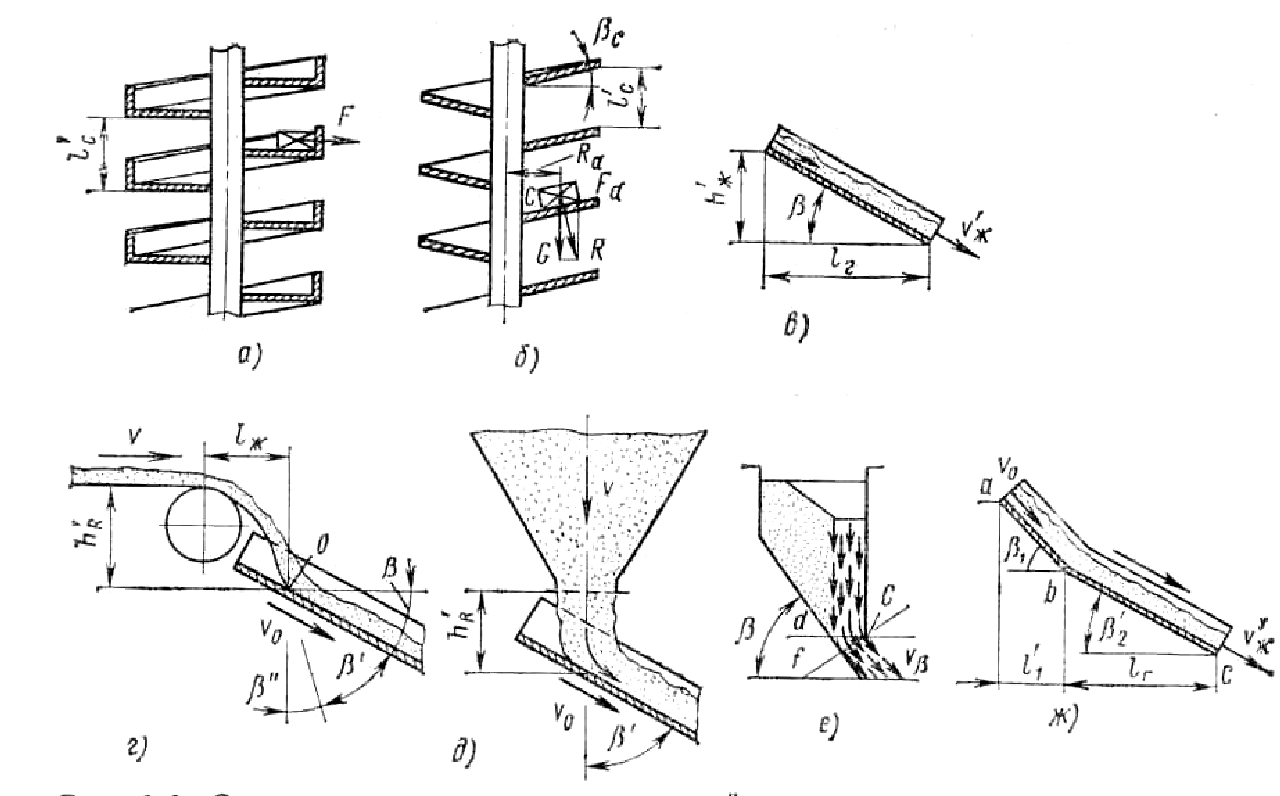
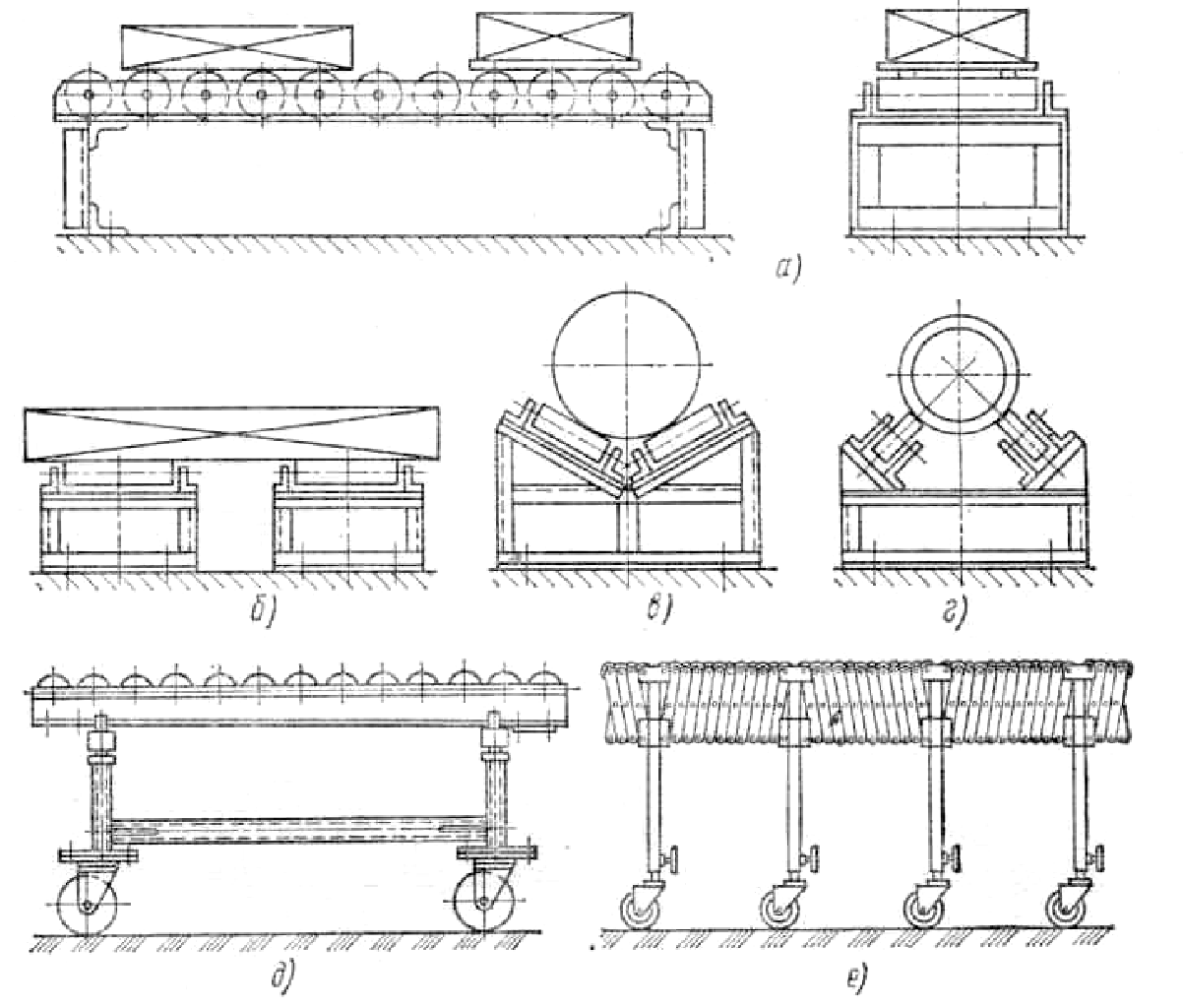
Рис. 29.3. Неприводные роликовые конвейеры: а - стационарный однорядный; б - стационарный раздельный сдвоенный; в - сдвоенный с наклонными роликами для цилиндрических грузов; г - с наклонными роликами (дисками) для труб; д - передвижной; е - передвижной раздвигающийся
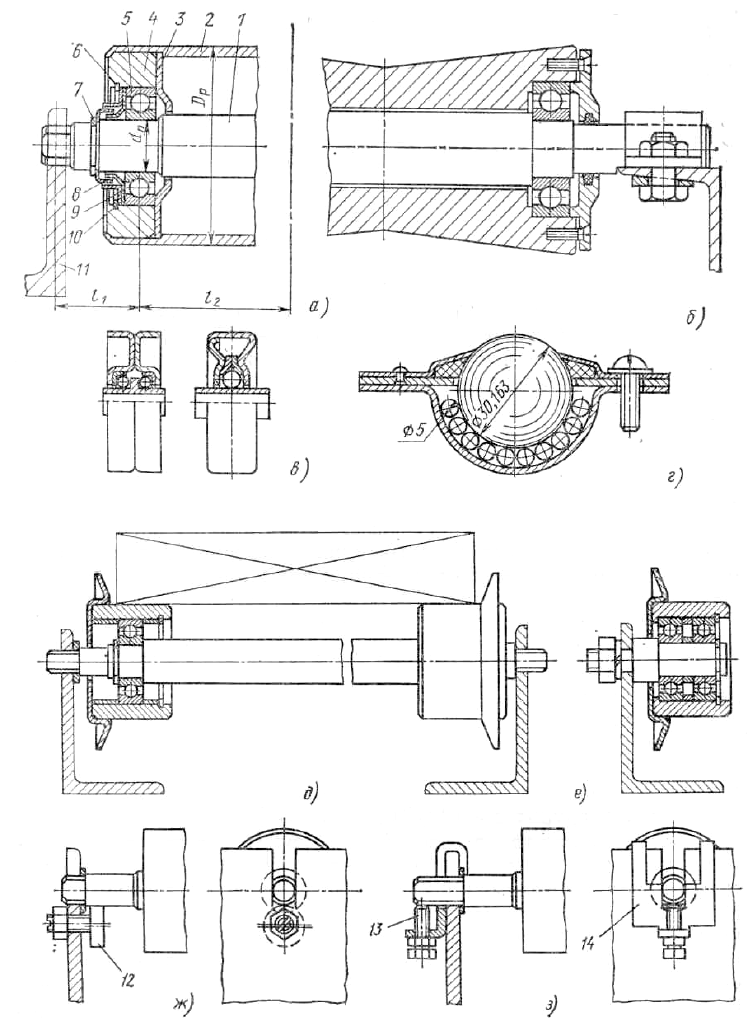
Рис. 29.4. Опорные элементы: а - цилиндрический ролик; б - желобчатый ролик; в - дисковые ролики; г - шаровая опора; д - дисковые ролики с ребордами на сквозных осях; е - дисковый ролик с ребордами на полуоси; ж - ролик с эксцентриковым выравнивателем уровня установки; з - ролик с винтовым выравнивателем уровня
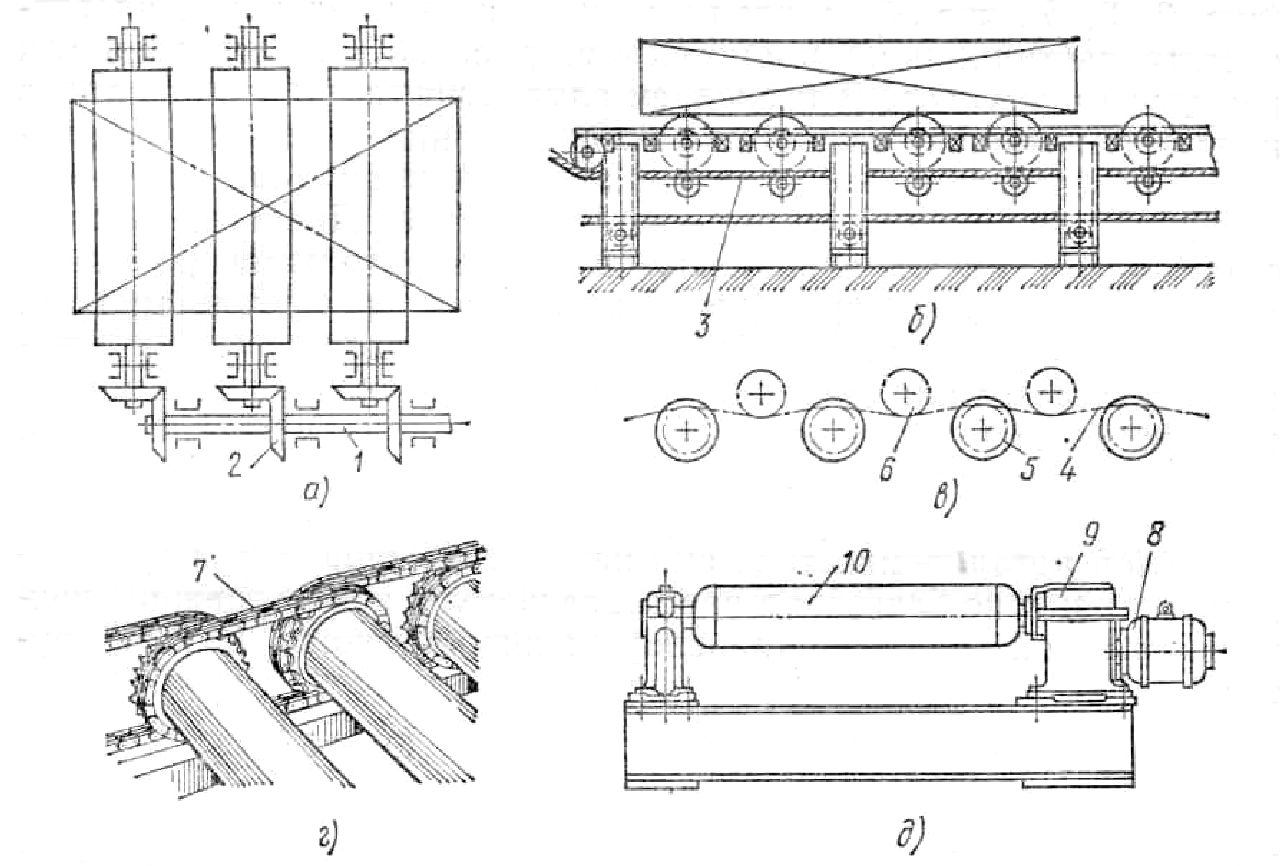
Рис. 29.5. Приводы роликов конвейеров: а - от вала с коническими зубчатыми колесами; б - от канатной тяги; в - от одной общей приводной цепи; г - от цепной передачи от ролика к ролику; д - от индивидуального двигателя
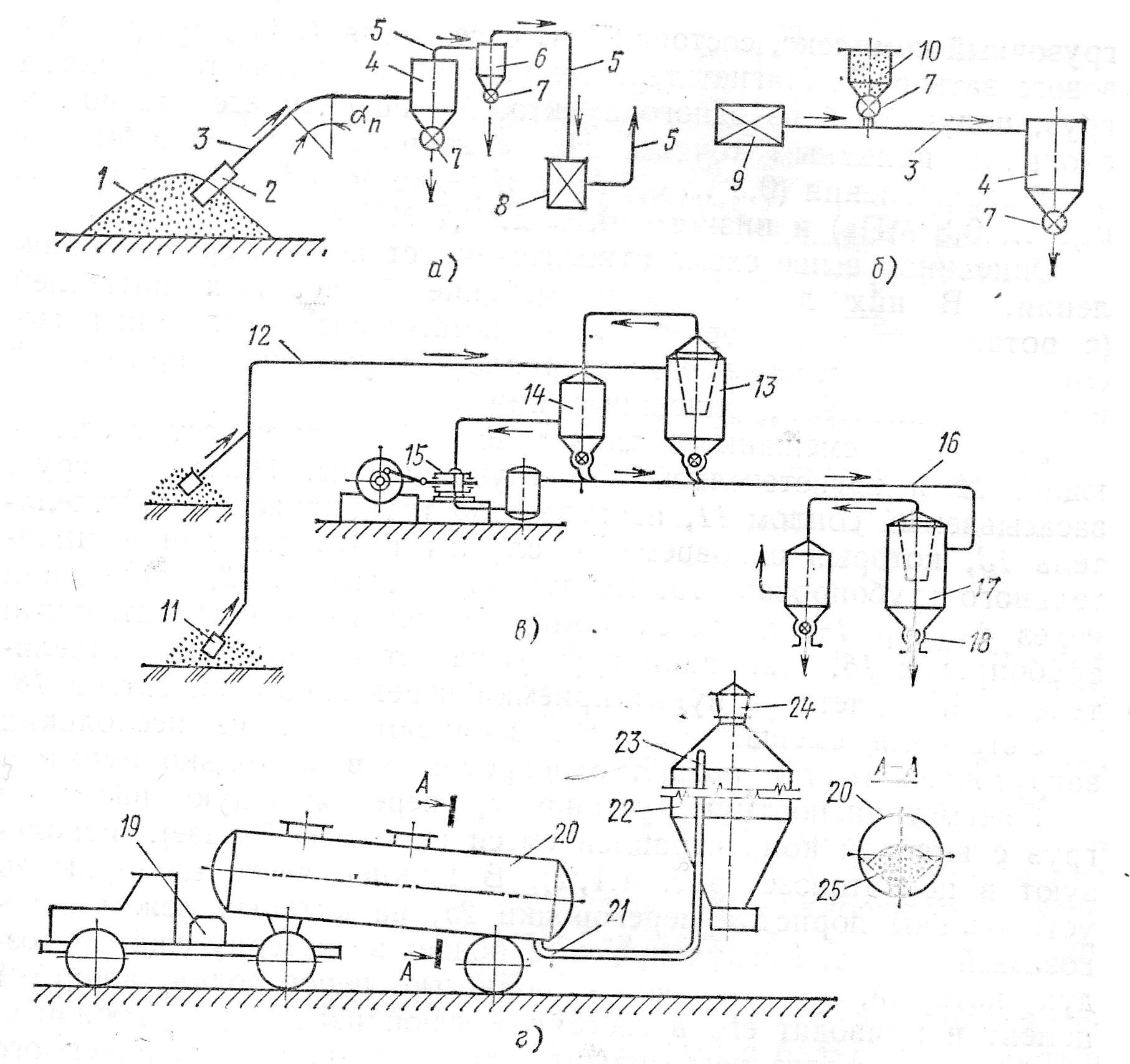
Рис. 30.1. Пневмотранспортные установки: а – всасывающая; б – нагнетательная; в – смешанная; г – схема цементовоза и приемного бункера
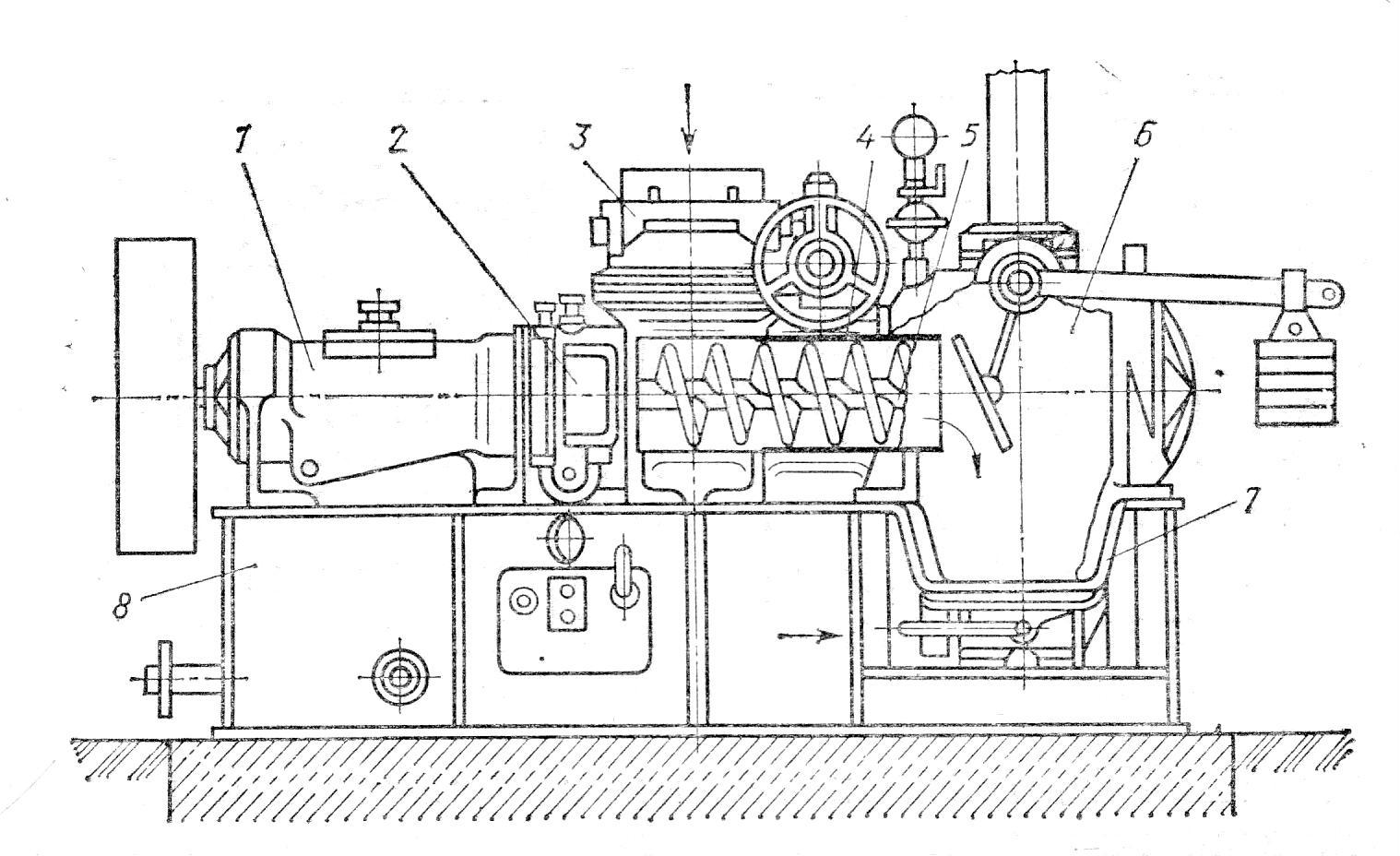
Рис. 30.2. Винтовой питатель
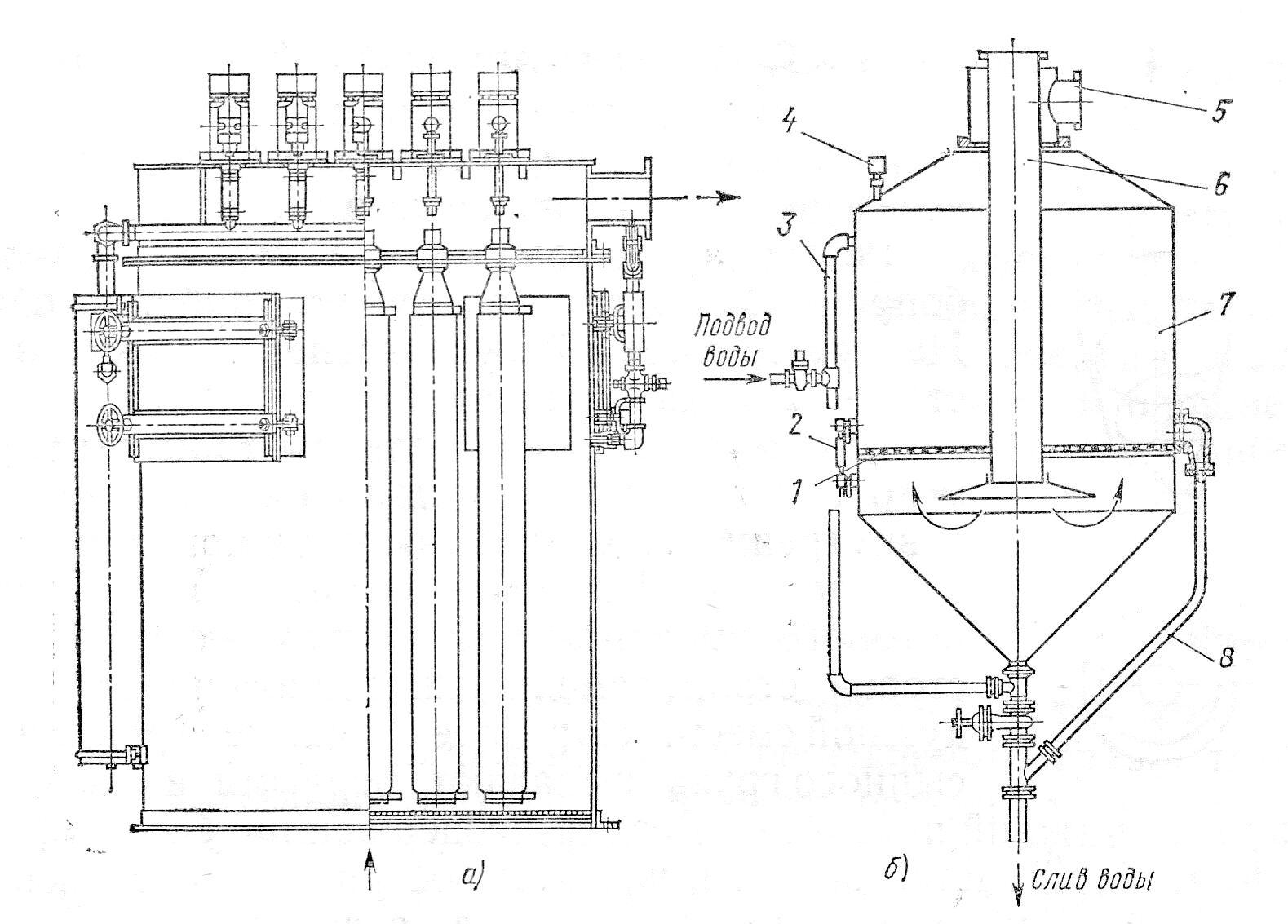
Рис. 30.3. Фильтры: а – сухой; б – мокрый
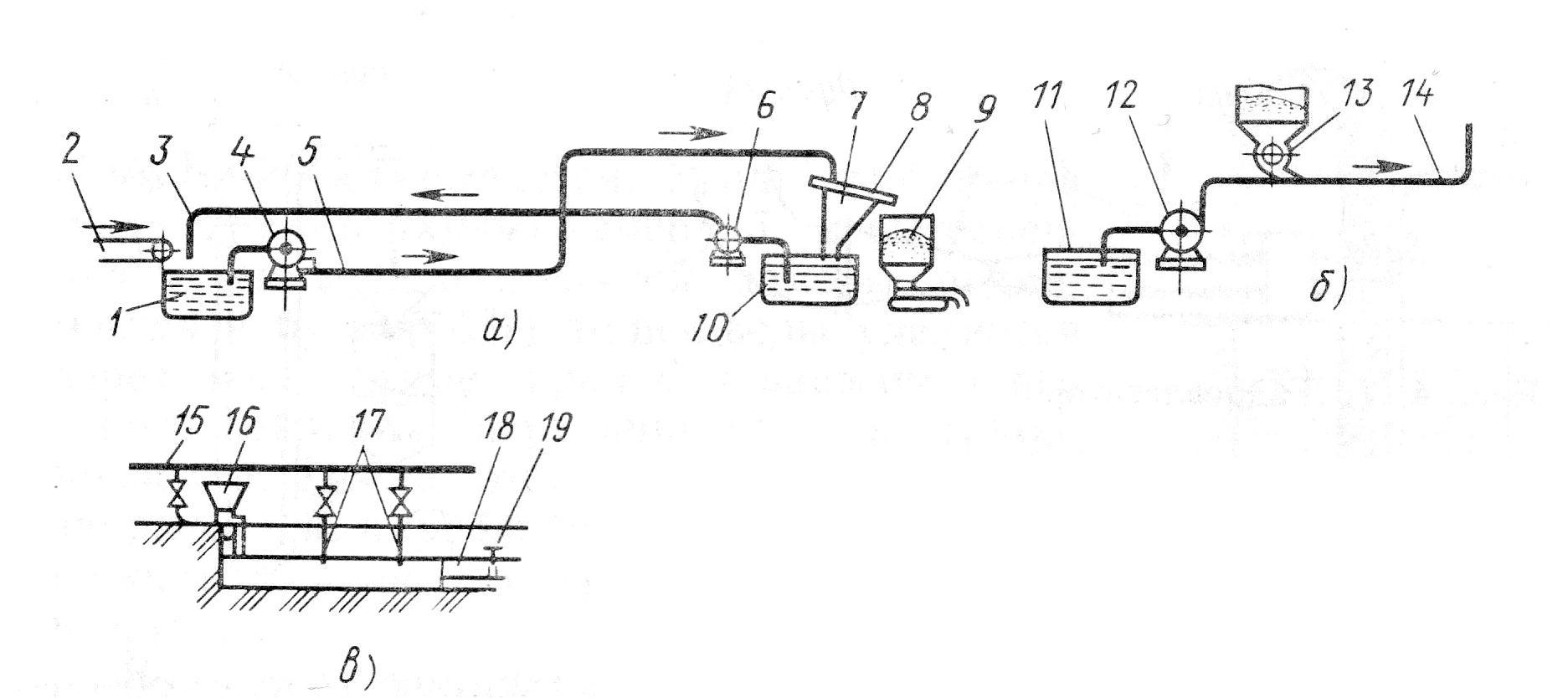
Рис. 30.4. Схемы гидротранспртных установок с подачей груза: а – пульпонасосом; б – из бункера; в – самотеком
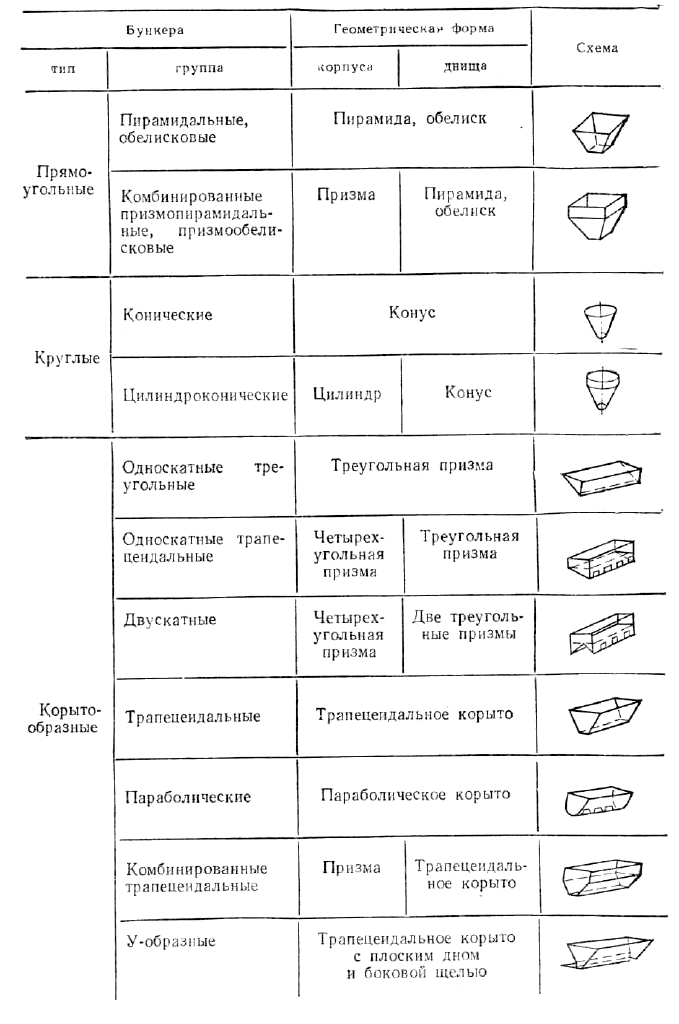
Рис. 31.1. Классификация бункеров