

4. Тяговая сила и мощность двигателя
Д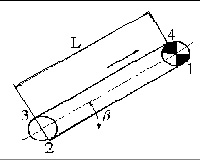 ля
определения полной величины тяговой
силы на конвейере с тяговым органом
пользуются методом последовательного
обхода по контуру или по точкам сопряжений
прямолинейных и криволинейных участков
контура трассы. Разбив контур на участки
и пронумеровав точки сопряжения, начиная
от точки сбегания тягового органа с
привода к точке набегания, находят
последовательно натяжения во всех
точках.
ля
определения полной величины тяговой
силы на конвейере с тяговым органом
пользуются методом последовательного
обхода по контуру или по точкам сопряжений
прямолинейных и криволинейных участков
контура трассы. Разбив контур на участки
и пронумеровав точки сопряжения, начиная
от точки сбегания тягового органа с
привода к точке набегания, находят
последовательно натяжения во всех
точках.
Во всех случаях удобно начинать обход контура от точки наименьшего натяжения в обе стороны к приводу. Величина наименьшего натяжения устанавливается в зависимости от типа конвейера.
При определении натяжения во всех точках контура пользуются общим правилом расчета: натяжение тягового элемента в каждой последующей по ходу точке контура равно натяжению в предыдущей точке в сумме с сопротивлением на участке между этими точками.
Таким образом:
![]()
т.е. в общем виде
![]()
При обходе контура против хода тягового элемента натяжение в каждой последующей точке равно разности между величиной натяжения в предыдущей точке и силой сопротивления на данном участке:
![]()
Общее тяговое усилие на приводном барабане (звездочке) равно разности Sнби Sсбнатяжений набегающей и сбегающей ветвей с привода
![]()
![]()
По максимальному натяжению выбирают гибкий тяговый элемент (ленту, цепь, канат), а по общему тяговому усилию определяют потребную мощность двигателя
![]()
где W0– тяговое усилие в кН;
V– скорость тягового элемента в м/с;
![]() - КПД передаточного механизма
- КПД передаточного механизма
Характер изменения величины натяжения тягового элемента по контуру можно изобразить графически в виде диаграммы натяжений (рис. 8.4) (рассмотрим в ленточных конвейерах) или в виде эпюры натяжений непосредственно на контуре конвейера.
![]()
Рис. 8.4. Диаграмма натяжений
Лекция 5
П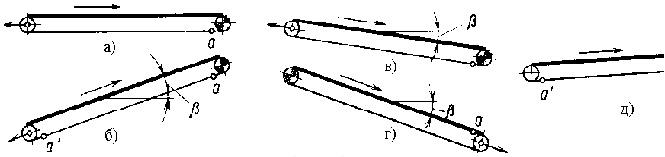 ри
передаче торговой силы трением привод
целесообразно располагать в точке
контура, где имеется естественное
повышение натяжения - обычно после
участка с наибольшим сопротивлением.
Отсюда для простых схем горизонтального
или наклонного конвейера с движением
груза вверх, привод следует устанавливать
в голове, т.е. в конце грузовой ветви.
ри
передаче торговой силы трением привод
целесообразно располагать в точке
контура, где имеется естественное
повышение натяжения - обычно после
участка с наибольшим сопротивлением.
Отсюда для простых схем горизонтального
или наклонного конвейера с движением
груза вверх, привод следует устанавливать
в голове, т.е. в конце грузовой ветви.
Если же движение груза по наклону вниз и общее сопротивление на грузовой ветви Wгр> 0 , то привод целесообразно располагать в голове конвейера (в), а при Wгр< 0 , то в хвостовой части конвейера (г). Для последнего случая , если W0> 0 , то двигательный режим, а если W0< 0 , то генераторный режим электродвигателя. Наименьшее натяжение тягового элемента на горизонтальном конвейере всегда у привода по сбегающей ветви (т. а). На наклонном конвейере с движением вверх при Wn> 0 тоже у привода в т. а , а при Wn< 0 в нижней точке обратной ветви (т. ). При движении груза по наклону вниз и Wгр> 0, точка наименьшего натяжения на сбегающей ветви у привода (сх. в), а при расположении привода в хвосте (сх. г) и Wгр<0 - в конце грузовой ветви.
. Динамика конвейеров
При пуске конвейеров (кроме статических) возникают дополнительные кратковременно действующие динамические нагрузки, необходимые для преодоления инерции движущихся масс и сопротивлений при трогании с места ходовой части конвейера.
Кинематика тяговых цепей
Звёздочка вращается с постоянной угловой
скоростью
![]() и зубья звёздочки 1, 2, 3 входят последовательно
в зацепление с шарнирами тяговой цепи
(рис. 9.2). Время поворота звёздочки на
центральный угол является периодом
зацепления.
и зубья звёздочки 1, 2, 3 входят последовательно
в зацепление с шарнирами тяговой цепи
(рис. 9.2). Время поворота звёздочки на
центральный угол является периодом
зацепления.
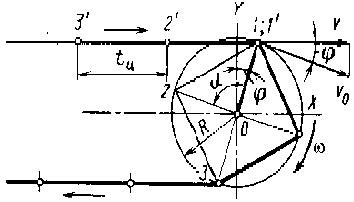
Рис. 9.2. Схема движения цепи по звездочке
Окружная скорость зуба V0=![]() R
тоже постоянна. Скорость цепи, считая
её движение поступательным:
R
тоже постоянна. Скорость цепи, считая
её движение поступательным:
![]()
где
![]() - переменный угол, образуемый радиусом
О1 и осью О
- переменный угол, образуемый радиусом
О1 и осью О
Таким образом, скорость цепи за период
поворота звёздочки на угол
![]() ,
соответствующий одному шагу цепи tц
изменяется по закону косинусоиды при
изменении угла
,
соответствующий одному шагу цепи tц
изменяется по закону косинусоиды при
изменении угла![]()
Ускорение цепи за тот же период меняется по закону синусоиды
![]()
Максимальное ускорение цепь достигает при
![]()
Принимая
![]() и
и![]() получим абсолютное значение максимального
ускорения
получим абсолютное значение максимального
ускорения
![]()
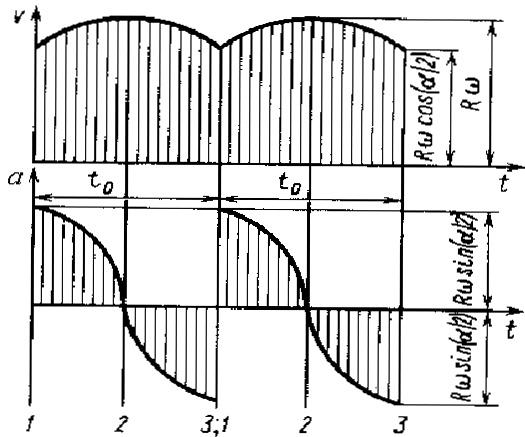
. Диаграмма скорости и ускорения тяговой цепи
Динамические усилия в тяговых цепях
Динамические усилия Sg, возникающие в тяговых цепях ввиду неравномерности их движения, пропорциональных в общем случае ускорению и массе груза и движущихся частей конвейера (F = ma). Наиболее опасным по величине динамических усилий будет момент входа шарнира цепи в зацепление с зубом приводной звёздочки, когда ускорение имеет максимальную положительную величину. Так как происходит мгновенное (ударное) приложение динамической нагрузки к цепям, то необходимо ввести коэффициент динамичности Кg=2 .
Тогда динамическое усилие:
![]()
где М –масса, принимающая участие в движении;
а – ускорение цепи.
При длине конвейера L , общий вес груза и движущихся элементов установки будет:
Практически максимальное ускорение не может быть передано мгновенно движущимся массам конвейера и груза, поэтому в расчёте учитывают только часть массы, участвующую в создании динамического усилия. Эту часть массы называют приведённой массой - Мпр.
![]()
где
![]() - коэффициенты участия соответственно
для груза и тяговой цепи.
- коэффициенты участия соответственно
для груза и тяговой цепи.
Тогда
![]()
Величина
![]() устанавливается на основе многократных
опытных данных. Для скребковых конвейеров
устанавливается на основе многократных
опытных данных. Для скребковых конвейеров![]() =
0,3 - 0,5; для пластинчатых конвейеров
=
0,3 - 0,5; для пластинчатых конвейеров![]() =
0,8 - 0,9; для ковшовых элеваторов
=
0,8 - 0,9; для ковшовых элеваторов![]() =1
(Данные Штокмана И.Г.) и
=1
(Данные Штокмана И.Г.) и![]() =1.
=1.
В соответствии с нормами ВНИИПТМАШа рекомендуется:
![]() = 1 при L < 25
= 1 при L < 25
![]() = 0,75 при L = 25-60 м и =1
= 0,75 при L = 25-60 м и =1
![]() = 0,5 при L > 60 м
= 0,5 при L > 60 м
При расчёте весьма коротких конвейеров
(толкателей, питателей) широко пользуются
формулой, но она даёт чрезмерно завышенное
значение динамического усилия (![]() =1, а Кg=3).
=1, а Кg=3).