

Правила преобразования структурных схем
Различные структурные схемы могут обладать одинаковыми передаточными функциями, т.е. быть динамически эквивалентными. Поэтому очень важно установить общие правила, с помощью которых одна схема может быть преобразована в другую с сохранением динамических характеристик. Теория преобразования структурных схем была разработана акад. Б.Н.Петровым. Она основана на рассмотрении алгебраических уравнений описывающих различные схемы.
Перенос точки приложения возмущающего воздействия.
Перенос возмущения в другую точку структурной схемы не должен отразиться на эффекте его действия на САР в целом. Поэтому перенос возмущений связан с включением в их цепь согласующих звеньев, передаточные функции которых выбираются из условия, чтобы действие возмущения на систему осталось неизменным.
Пусть требуется перенести возмущение против направления передачи главного воздействия (рисунок 4.3, а, б). Для этого покажем, что схема на (рисунке 4.3, б) тождественна схеме на (рисунке 4.3, а):
,

Рисунок 4.3 Преобразования структурных схем
Итак, внешнее воздействие f(t),
приложенное к выходу звена, можно
перенести на его вход, добавив между
воздействием и входом звена звено с
передаточной функцией![]() .
.
Аналогично можно получить правило переноса воздействия со входа звена на его выход (рисунок 4.3, в, г).
Внешнее воздействие, приложенное к входу звена можно перенести на его выход, добавив между воздействием f(t)и входом звена звено с передаточной функциейW1(p).
Перенос точки съема внутренних обратных связей.
Перенос точек съема обратных связей не должен изменить передаточную функцию системы в целом.
Передаточная функция разомкнутого контура, куда входит внутренняя обратная связь с передаточной функцией W3(p)(рисунок 4.3, д, е):
![]() , (4.7)
, (4.7)
При переносе точки съема из точки «в»в точку«а»будем иметь
![]() , (4.8)
, (4.8)
где Wcо2(p)- передаточная функция согласующего звена.
Так как при любом из преобразований передаточная функция должна оставаться без изменений, то
![]() , (4.9)
, (4.9)
Таким образом, точку присоединения звена можно перенести с выхода звена на его вход, добавив между входами и звеном с передаточную функцию W2(p).
Аналогично можно показать, что при переносе точки съема из точки «а» в точку «в»
![]() , (4.10)
, (4.10)
Точку присоединения звена можно перенести с выхода звена на его вход, добавив между входами звеньев звено с передаточной функцией [W2(p)]-1(рисунок 4.4, а).
Перемещение суммирующего узла через узел разветвления.
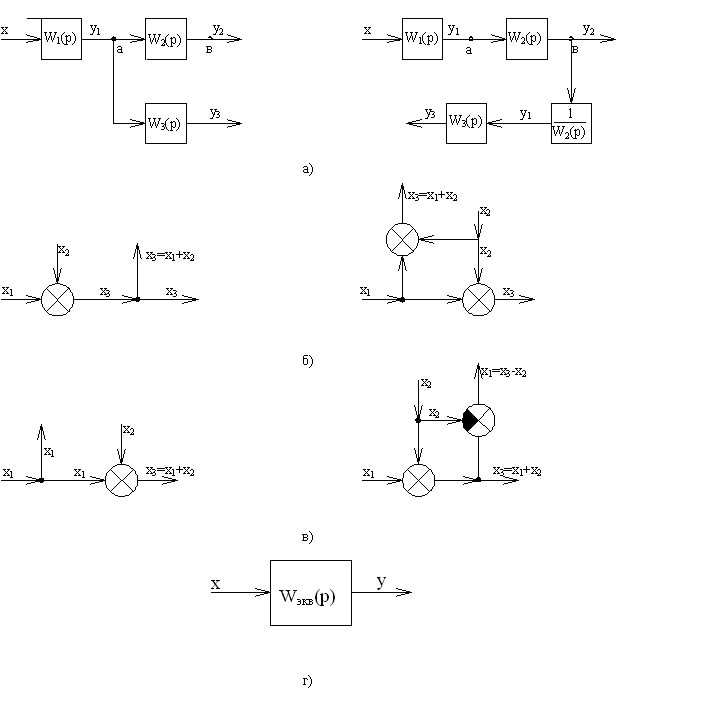
Рисунок 4.4 Преобразования структурных схем
При перемещении суммирующего узла через узел разветвления по ходу сигнала надо в отходящих от разветвления ветвях добавить такие же, как и перемещаемый суммирующие узлы (рисунок 4.4, в).
Все перечисленные правила преобразования структурных схем позволяют привести сложные схемы к более простому виду (рисунок 4.4, г) и найти передаточную функцию всей САУ, а следовательно и характеристическое и полное уравнение системы, не решая систему дифференциальных уравнений звеньев.
Эти правила дают возможность установить перекрестные связи в структурной схеме и привести многоконтурные системы к одноконтурным.
Рассмотрим преобразование структурной схемы (рисунок 4.5), которая содержит две перекрестные обратные связи. Необходимо представить схему одним эквивалентным звеном.
![]() ;
;
![]() ;
;
![]() ;
(4.11)
;
(4.11)
![]() ;
;
![]() .
.
Перенесем точку съема обратной связи «а» в точку «в». Получим двухконтурную схему (рисунок 4.5, б, в) с внутренним контуром, включающим в себя передаточные функции: W2(p),W3(p),W5(p).
Этот контур можно свернуть в одно звено с передаточной функцией
![]() , (4.12)
, (4.12)
В результате получаем одноконтурную структурную схему (рисунок 4.5, в). Применяя правила для последовательного и встречно-параллельного включения звеньев, можно получить структурную схему, которая состоит из одного звена (рисунок 4.5, е) с передаточной функцией:
![]() ,(4.13)
,(4.13)

Рисунок 4.5 Преобразования структурных схем
Итак, используя правила преобразования структурных схем можно получить структурную схему любой сложности. Можно перейти от сложной структуры с перекрестными обратными связями к более простой и наоборот.
При переходе от сложной структурной схемы к простой упрощается структура, но усложняется передаточная функция. Это хорошо видно из уравнения (4.13). Структурные упрощения могут привести к сложному дифференциальному уравнению, анализ которого связан с большими затруднениями. Поэтому при упрощении структурных схем необходимо учитывать возрастающую сложность передаточной функции эквивалентного звена.