

Механика
.pdfВВЕДЕНИЕ |
3 |
|
|
|
|
ВВЕДЕНИЕ. О ФИЗИКЕ ВООБЩЕ, ОБ ИНЖЕНЕРНОЙ
ФИЗИКЕ И ЕЁ ОСОБЕННОСТЯХ ДЛЯ БУДУЩИХ БАКАЛАВРОВ. РЕВОЛЮЦИЯ В ФИЗИКЕ В НАЧАЛЕ ХХ ВЕКА
Физика, как и математика, относится к фундаментальным наукам, т.е. является базой, на которой строятся науки прикладные
– имеющие непосредственное отношение к инженерной мысли и техническому прогрессу общества. Однако в отличие от математики (без которой физика обойтись не может) определить, что физика изучает, гораздо сложнее. В русских учебниках XIX века, как и во многих современных зарубежных учебниках, говорилось, что физика изучает явления и законы неживой природы (или материального мира). В советских учебниках семидесятых, когда было очень модно говорить о философских проблемах физики (а делали это все, кому не лень – и кстати, и некстати), её определяли как науку о наиболее общих формах существования материи – пространстве и времени, а также о наиболее общих формах её движения. Риторический вопрос: вы из этого что-нибудь поняли, чем занимается физика? Если и правильно сказано, то уж очень «общó» (как любили говорить в тех же семидесятых. Первое определение всё-таки более правильное. Всё же физика занимается неживой природой, хотя есть на свете и биофизика. Заниматься неживой природой не так уж и плохо: инженерные сооружения тоже неодушевлённые сооружения, а какие встречаются шедевры!
В связи с переходом на бакалавриат возникла необходимость создания двухсеместрового курса инженерной физики. Возникло
4 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
много вопросов: при общем дефиците времени нужно ли будущему инженеру-бакалавру знать ядерную физику и квантовую механику или же только законы механики и электричества; нужно ли знать откуда берутся формулы для расчёта двигателя или же достаточно их просто написать на доске и преподнести как готовое блюдо с незамысловатым словесным гарниром и т.д. и т.п. Современный подход к этому вопросу в большинстве случаев таков, что физика как фундаментальная наука инженеру-бакалавру необходима и должна быть преподнесена в достаточно полном объёме, хотя и без деталей. А нужно это для развития мировоззрения студента, его творческой мысли, так необходимой для блестящих инженерных решений. Иначе реализуется один из основных законов философии – количественные изменения превратятся в качественные, и физика превратится в перечень нужных сведений, которые могут и пригодиться, но не помогут сформировать цельной картины мира, необходимой инженеру как основа для дальнейшего самостоятельного творческого полёта. Иначе не сообразит он, что ажурная башня В.Г. Шухова соткана из прямых стержней, а огромное подвесные мосты Нью-Йорка и Стамбула во многом аналогичны висящей паутинке.
Предлагаемый курс является попыткой представить физику такой, какой по мнению автора её следует читать для будущих бакалавров. При разработке курса автор использовал литературу, указанную в конце книги. Фрагменты, которые можно опустить при первом знакомстве с материалом, выделены в тексте мелким шрифтом и рекомендуются для дальнейшей самостоятельной работы над пособием.
Сейчас, в начале XXI века, многие физики говорят, что с их наукой может случиться очередная революция. Вроде той, которая
ВВЕДЕНИЕ |
5 |
|
|
|
|
произошла на рубеже XIX-XX веков. Два кардинальных момента обусловили тогдашнюю революцию.
1.Чтобы объяснить природу теплового излучения и фотоэффект, пришлось принять гипотезу Макса Планка, что электромагнитная энергия испускается в виде потока отдельных маленьких частиц и что энергия такой частицы пропорциональна частоте излучения. Выяснилось далее, что весь микромир подчиняется законам, отличным от законов мира больших тел (макромира). Не только энергия, но и многие другие физические величины в микромире квантуются, т.е. принимают набор определённых значений. Это как английская булавка – она может быть либо закрыта, либо открыта. Так и эти величины: допустим, что некоторая величина L может принимать значения 2, 7, 13, 17, 39, а значений, приходящихся на промежутки между ними, принимать не может. Так в 1900 г. роди-
лась квантовая механика.
2.Другие наблюдения показали, что мир больших скоростей также отличен от мира малых скоростей, с которыми человек обычно имеет дело. И в 1905 г. рождается специальная теория относительности Альберта Эйнштейна, основанная на полученных ранее результатах голландца Г. Лоренца.
Этих двух моментов оказалось достаточно, чтобы всё пересмотреть и всё изменить. Будет ли вскоре новая революция? Время покажет.
Предлагаемая новая концепция курса физики для инженеров излагалась автором на Международной конференции по инженерному и компьютерному образованию ICECE-2000 в Сан-Паулу, Бразилия, где получила обнадёживающую поддержку. На основе этой концепции создано и данное пособие.
6 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
|
ЧАСТЬ 1. МЕХАНИКА |
ГЛАВА 1. КИНЕМАТИКА: ФИЗИЧЕСКИЕ МОДЕЛИ, СИСТЕМЫ ОТСЧЁТА, ЛИНЕЙНАЯ СКОРОСТЬ, ПРИНЦИП ОТНОСИТЕЛЬНОСТИ ГАЛИЛЕЯ, ПЕРВЫЙ ЗАКОН НЬЮТОНА
Самой простой формой движения материи является механическое перемещение тел. Оно происходит в пространстве и во времени, которые сами по себе являются формой существования материи и даются нам на опыте благодаря знакомым с детства представлениям дальше-ближе, раньше-позже, характеризующим про- странственно-временные отношения – длительность, последовательность, протяжённость, расположение.
Чаще всего реальное движущееся тело можно упростить, представив его с помощью физической модели. Это упрощённая си-
стема, адекватно передающая главные свойства реальной основной системы и взаимодействие её элементов. Рассмотрим типы физи-
ческих моделей.
Материальная точка – тело, размеры которого настолько малы, что в рассматриваемом движении ими можно пренебречь и считать, что всё вещество, из которого тело состоит, сосредоточено в точке. Поэтому нет смысла говорить о движении отдельных частей тела или о вращении вокруг собственной оси. Решая задачу о брошенном камне, мы пользуемся именно этой моделью.

ГЛАВА 1 |
7 |
|
|
|
|
Абсолютно твёрдое тело – совокупность материальных точек с неизменными расстояниями между ними; размеры тела неизменны, деформаций нет.
Сплошная среда – объект, в котором возможны деформации и перемещения; вещество тела распределено непрерывно (а не в виде материальных точек), разрывы не допускаются или же учитываются отдельно. Такая модель, в частности, применяется для описания свойств жидкости или плазмы.
Раздел механики, описывающий движение тел без анализа причин, вызывающих движение или изменения в движении, называ-
ется кинематикой.
Системы отсчёта. Тело, по отношению к которому описывается движение данного тела, называется телом отсчёта. Связанная с ним система координат (служащая для указания положения тела в пространстве) вместе с часами (для указания времени) называется системой отсчёта.
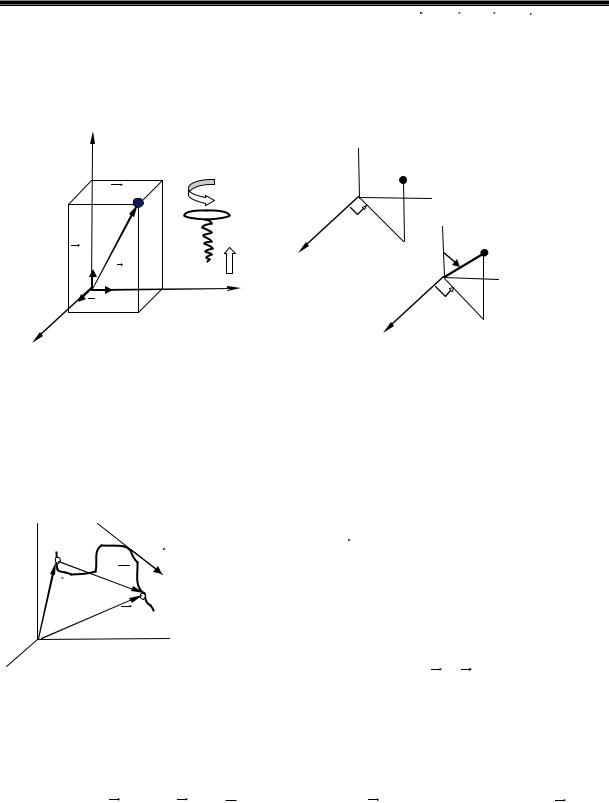
Декартова 1 прямоугольная система координат представляет собой тройку взаимно перпендикулярных осей. Положение точки М задаётся тремя числами x, y, z или же с помощью радиус-вектора
R , проведённого из начала координат в точку М. Если при кратчайшем повороте рукоятки буравчика в плоскости XOY от Х к Y его винт перемещается вдоль Z, то система называется правой (рис. 1.1). Чаще всего именно такая система и используется на практике. В этом случае x, y, z являются проекциями радиус вектора на соответствующие оси. Если ввести единичные вектора (орты) i , j , k , указывающие направления вдоль осей, то радиус-вектор можно
1 Р. Декарт (1596 – 1560) - французский физик, математик и философ; его последователи – картезианцы.
8 ЧАСТЬ 1. МЕХАНИКА
разложить по ортам, то есть представить как R xi + y j + zk . Другие системы - цилиндрическая (полярная) и сферическая также применяются в задачах с соответствующим типом симметрии.
Z
M { x, y ,z } M{ , , z }
|
|
R |
|
|
|
M{ , , } |
|
|
|
|
z |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
Х |
i |
Y |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Рис. 1.1. Декартова, цилиндрическая и сферическая системы координат
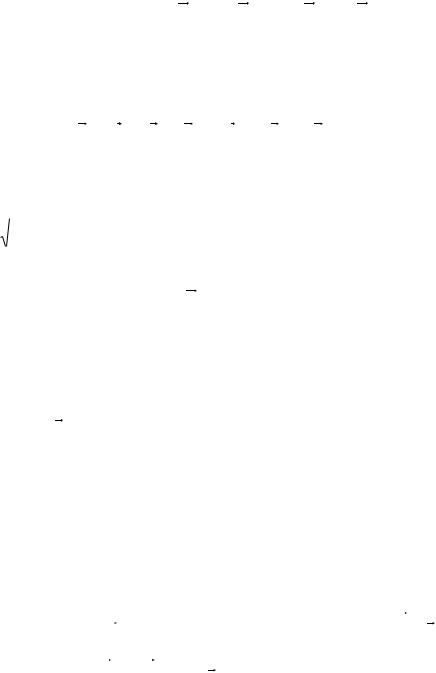
Линейная скорость. Пусть некоторая материальная точка перемещается из А в В (рис. 1.2). Линия, вдоль которой точка перемещается, называется траекторией, а
А |
|
|
вектор |
R , проведённый из исходного |
|
|
v |
||
|
R |
|
|
|
Rt |
|
пункта в конечный называется векто- |
||
|
|
|||
|
|
|
|
|
В |
ром перемещения или просто переме- |
Rt t |
|
|
щением. Зависимость радиус-вектора |
Рис. 1.2. |
точки от времени R R(t ) называется |
|
уравнением движения. Одному такому |
векторному уравнению соответствуют три скалярных: x = x(t), y = y(t), z = z(t). Пусть в момент t точка находится в А, а в момент t + t - в В. Тогда Rt t Rt R . Отношение R / t зависит как от R , так и от t, однако при t 0 оно стремится к определённому пределу,
называемому линейной мгновенной скоростью (чаще просто скоростью):
ГЛАВА 1 |
9 |
|
|
|
|
v lim |
R lim |
Rt t Rt |
|
dR |
|
|
|
||||
t 0 |
t |
t 0 |
t |
|
dt |
|
|
||||
(по определению производной). Размерность скорости [v ] = м/с. Разложение по ортам через проекции имеет вид
v xi y j zk v x i v y j v z k ,
где точка над буквой, как это принято в физике, обозначает дифференцирование по времени. Величина скорости определится по фор-
|
|
|
|
|
|
муле |
v v 2 |
v 2 |
v 2 |
. Определим теперь направление вектора |
|
|
|
x |
y |
z |
|
мгновенной скорости. |
При t 0 хорда АВ совпадает с участком |
||||
траектории и, следовательно, R cовпадает с касательной к траектории движения в данной точке (см. рис. 1.2). Таким образом, понятие мгновенной скорости относится к данной точке и к данному моменту. Направлена мгновенная скорость по касательной в сторону движения. Если v const , то есть мгновенная скорость постоянна и по величине, и по направлению (у любого вектора всегда «двойная» информация!), то такое движение называется равномерным прямо-
линейным.
При так называемом траекторном способе описания движения вводится бесконечно малый элемент траектории ds. Тогда вве-
дём единичный вектор e в направлении касательной: |
dR |
e . Мгно- |
||||||||
ds |
||||||||||
|
|
|
|
|
|
|
|
|
||
венная скорость |
v |
dR |
|
dR |
|
ds |
ve , где v – скалярная величина, |
|||
dt |
ds dt |
|||||||||
|
|
|
|
|
|
|||||
характеризующая быстроту изменения траектории по времени. Более «обывательским» является понятие средней путевой
скорости – отношение всего пройденного пути к соответствующему промежутку времени <v> = s/t. Тело при этом могло на разных участках иметь различную мгновенную скорость, могло и останавливаться.
10 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
Принцип относительности Галилея. Галилей писал:
«…Уединитесь с кем-либо из друзей в просторном помещении под палубой корабля, запаситесь мухами, бабочками и другими подобными летающими насекомыми; пусть будет у вас также сосуд с водой и рыбками; подвесьте далее наверху ведро, из которого вода будет капать капля за каплей в другой сосуд с узким горлышком, подставленный внизу. Пока корабль стоит неподвижно, наблюдайте прилежно, как мелкие летающие животные с одной и той же скоростью движутся во все стороны помещения; рыбы будут плавать безразлично во всех направлениях; все падающие капли попадут в подставленный сосуд, и вам, бросая какой-нибудь предмет, не придётся бросать его с большей силой в одну сторону, чем в другую, если расстояния будут одни и те же. И если вы будете прыгать сразу двумя ногами, То сделаете прыжок на одинаковое расстояние в любом направлении. Прилежно наблюдайте всё это… Заставьте теперь двигаться корабль с любой скоростью, и тогда (если только движение будет равномерным и без качки во всех названных явлениях вы не обнаружите ни малейшего изменения и ни по одному из них не сможете установить, движется ли корабль или стоит неподвижно» (Г. Галилей. Избранные труды. Т.1. –
М.: Наука, 1964. – С. 286).
Так, проснувшись ночью в поезде и увидев через окно соседний состав, не сразу определишь, движется ли твой поезд, движется ли соседний поезд, или же оба стоят на месте, или же оба движутся. Описанные явления обобщаются принципом относительности Галилея: в системах отсчёта, находящихся друг относительно друга в состоянии покоя или прямолинейного равномерного движения, все физические явления и процессы происходят одинаково. Такие системы называются инерциальными, вследствие свойства всех тел, называемого инерцией, заключающегося в том, что если на тело не действуют никакие другие тела, то оно сохраняет состояние покоя или прямолинейного равномерного движения.
Последнее утверждение является Первым законом Ньютона, который вместе с другими законами механики был им сформулирован в 1687 г. в знаменитых «Математических началах натурфилософии». Таким образом, инерциальные системы отсчёта неразличимы! Это, пожалуй, самая лаконичная формулировка принципа Галилея. Перейдём к математическому выражению принципа. Пусть

ГЛАВА 1 |
11 |
|
|
|
|
имеются две инерциальные системы К и К’ (рис. 1.3), одну из которых, например К, будем считать неподвижной («лабораторной»), а другую – движущейся относительно К со скоростью v , направленной вдоль осей х и х’. Пусть при t = 0 начала обеих систем совпадают, а время в системах течёт одинаково: t = t’. Тогда через время t начало O’ будет находиться в точке x = vt (относительно К ).
|
|
|
Y |
Y’ |
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
K |
|
K’ |
|
|
|
|
|
|
|
|
|
|
|
|
|
x = x’ + vt’; |
x’ = x – vt; |
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
y = y’; |
y’ = y; |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
X’ |
|
z = z’; |
z’ = z; |
(1.1) |
|
O |
|
|
|
O’ |
|
|
t = t’; |
t’ = t; |
|
|
|
|
|
|
|
|
|
|
||||
Z |
|
Z’ |
|
X |
|
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
Рис. 1.3. |
|
|
|
|
|
|
||||
Поэтому события, одновременные в К, будут одновременными и в K’. Формулы (1.1) выражают рассмотренный принцип относительности и называются прямыми и обратными преобразованиями Галилея. Рассмотрим какое-нибудь событие, начинающееся в момент t1 и заканчивающееся в момент t2 . Тогда t2 - t1 = t2’ - t1’ или
t = t’ . Длительность этого события (интервал) одна и та же в обе-
их системах. Величины, численное значение которых не изменяется при переходе от одной системе отсчёта к другой, называются инва-
риантами. Инвариантом является и длина стержня, которая в К
равна |
L |
x2 x1 2 y2 y1 2 z2 z1 2 , |
а |
в |
K’ |
равна |
L' x2' x1' 2 |
y2' y1' 2 z2' z1' 2 . Подставляя формулы (1.1), полу- |
|||||
чим, что L = L’. Поэтому, длина – тоже инвариант.
12 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ГЛАВА 2. КИНЕМАТИКА: ЛИНЕЙНОЕ УСКОРЕНИЕ,
РАВНОУСКОРЕННОЕ ДВИЖЕНИЕ, УГЛОВАЯ СКОРОСТЬ, УГЛОВОЕ УСКОРЕНИЕ
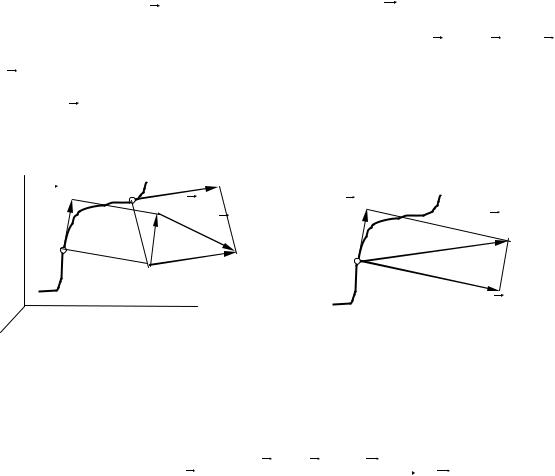
Линейное ускорение. При движении точки по горизонтальной траектории её скорость может меняться и по величине, и по направ-
лению. Скорость v t |
связана со скоростью v t t в некоторый после- |
дующий момент t + |
t векторным соотношением v t t v t v , где |
v - приращение скорости. Как видно из рис. 2.1 а, приращение скорости v уже не направлено по касательной; оно может быть направлено куда угодно, но обязательно внутрь траектории.
v t |
v t t |
a |
|
|
|
||
|
v |
|
a |
|
|
|
|
|
|
|
|
|
an |
|
а) |
|
|
|
|
|
|
б) |
|
|
|
Рис.2.1 |
|
|
|
|
|
|
||||
Линейным мгновенным ускорением (или просто ускорением) |
||||||||||
называется быстрота изменения скорости |
|
|
|
|
||||||
|
v |
|
dv |
|
d 2 R |
|
|
|
|
|
a lim |
|
|
|
R . |
(2.1) |
|||||
t |
|
dt 2 |
v |
|||||||
t 0 |
|
dt |
|
|
|
|
||||
Это полное ускорение. Его направление определяется направлением вектора бесконечно малого приращения скорости. Единица измерения в СИ [а] = м/с2. Поскольку полное ускорение характеризует изменение скорости и по величине, и по направлению, то целесообразно разложить его на две составляющие, одна из ко-