

Механика
.pdfГЛАВА 6 |
43 |
|
|
|
|
содержание последнего соотношения заключается в следующем: рот смещении точки m на расстояние d s сила совершает над ней работу ( F d s ) , в результате чего изменяется скалярная величина
Ек = mv2/2, характеризующая движение тела, его способность совершить работу, благодаря движению. Эта скалярная величина за-
висит от абсолютного значения скорости и называется кинетической энергией. Энергия – это способность тела или системы совершить работу. Измеряется, как и работа, в джоулях. Кинетическая энергия характеризует работу, которую может совершить система до полной остановки её частей.
Пусть тело смещается из точки 1 в точку 2, а скорость меняется от v1 до v2. Интегрируя последнее соотношение, получим:
v2 |
mv 2 |
|
2 |
mv 2 |
|
mv 2 |
|
0, v2 v1 |
|
||
|
|
|
|
( F d s ); |
2 |
|
1 |
A12 |
|
|
. (6.1) |
|
|
|
|
|
|||||||
d |
|
|
|
|
v1 |
||||||
v1 |
|
2 |
|
1 |
2 |
|
2 |
|
0, v2 |
|
|
То есть изменение кинетической энергии при перемещении точки из 1 в 2 равно совершённой при этом работе. Возникает естественный вопрос: а зависит ли величина этой работы от пути?
Все силы можно разбить на два класса: те, для которых работа не зависит от пути, и те, для которых зависит. Силы, для которых работа не зависит от вида траектории, называются потенциальными
|
|
(например силы тяготения, сила взаимодействия |
||
L |
2 |
зарядов). В противном |
случае сила является |
|
|
||||
|
|
|||
L |
|
непотенциальной |
(например, силы сухого тре- |
|
L |
|
|||
|
|
|
|
|
1 |
|
ния). Таким образом, для потенциальных сил |
||
|
|
|
|
|
Рис. 6.2 |
|
траектории L1, L2 или L3 |
(рис. 6.2) дают одно и то |
|
|
|
2 |
1 |
|
же значение работы. Так как A12 dA dA A21 , то |
||||
|
|
1 |
2 |
|
|
|
( F d s ) 0 |
(6.2) |
|
|
|
L |
|
|
44 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
по любой замкнутой траектории. Критерий (6.2) является необходимым и достаточным условием потенциальности поля сил. Согласно теореме, если некоторая сила является потенциальной, то существует такая функция координат Еп = Еп(x, y, z), для которой компоненты силы в декартовой системе определяются частными производными по координатам:
F |
|
Eп ; F |
|
Eп ; F |
Eп |
или F grad E |
п |
E |
п |
. (6.3) |
||
x |
|
x |
y |
|
y |
z |
z |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Частная производная означает дифференцирование только по одной переменной из нескольких, от которых зависит функция, а вектор grad Eп, который также обозначается оператором («набла»), является векторным обобщением понятия производной:
grad Eп |
|
Eп i |
Eп |
j |
Eп k |
(в декартовых координатах; в дру- |
|
|
x |
y |
|
z |
|
гих будет по-другому). Этот вектор определяет направление, в котором следует двигаться от этой точки для наиболее быстрого возрастания функции. Учитывая (6.3), запишем
dA ( F d s ) Fx dsx Fy dsy Fzdsz |
|
|
|
|
|
|
|||||||||||||||
Eп dx |
Eп dy |
Eп |
dz dEп , т.е. полный дифференциал |
||||||||||||||||||
|
x |
|
|
y |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
||
функции Еп. Следовательно, ( F d s ) dEп и |
|
|
|
||||||||||||||||||
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A12 ( F d s ) dEп |
( Еп2 |
|
Еп1 ) . Сравнивая с (6.1), получим |
|||||||||||||||||
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mv 22 |
|
mv12 |
( E |
|
E |
|
) или |
|
mv 22 |
Е |
|
|
mv12 |
E |
|
или |
||||
|
|
|
|
п2 |
п1 |
|
|
п2 |
|
п1 |
|||||||||||
2 |
|
2 |
|
|
|
|
|
|
2 |
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
mv 2 |
E |
|
сonst . |
|
|
|
|
(6.4) |
|||||
|
|
|
|
|
|
|
2 |
|
п |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Функция координат Еп называется потенциальной энергией и характеризует способность системы совершить работу, благодаря конфигурации элементов системы; при этом одна из конфигураций
ГЛАВА 6 |
45 |
|
|
|
|
принимается за начало отсчёта нулевого уровня энергии. Соотношение (6.4) является законом сохранения механической энергии. Идеальные системы, в которых сохраняется полная механическая энергия, называются консервативными. Механическая энергия системы тел сохраняется неизменной, если суммарная работа внешних сил и сил трения внутри системы равна нулю.
Полная энергия системы может включать кроме механической и другие виды энергии – химическую, биологическую и т.п. , причём различные виды энергии могут переходить друг в друга. Полная энергия сохраняется в замкнутых системах, т.е. в системах, для которых равнодействующая всех внешних сил равна нулю. Понятие изолированной системы (см. выше, гл. 5) шире: если система изолированная, то она является замкнутой.
Потенциальная энергия связана с силой, а потому и с взаимодействием между телами (нет силы – нет взаимодействия и Еп = 0 ). Этот вид энергии выражает скрытые возможности системы произвести работу. Когда такие возможности реализуются, потенциальная энергия переходит в другие виды энергии. Она измеряется работой, которую система может совершить, изменяя конфигурацию своих элементов, и таким образом зависит от взаимного расположения элементов системы.
Выбор начала отсчёта потенциальной энергии называется нормировкой. Возьмём вместо Еп величину Еп’ = Еп + const. Тогда
соответствующая сила (6.3) будет F' |
|
Eп' |
|
Eп |
F . Так же |
|
x |
x |
|||||
x |
|
|
x |
|||
|
|
|
|
для Fy и Fz. Таким образом, если к Еп прибавить константу, то сила не изменится. Не изменится и разность потенциальных энергий для двух различных точек. Поэтому выбор начала отсчёта потенциаль-
46 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ной энергии (её ноль) можно сделать произвольным образом. Обычно это делается, исходя из условий конкретной задачи. Рассмотрим два наиболее важных в механике примера.
Потенциальная энергия поля тяготения. Вблизи поверхности Земли можно считать, что mg = const/. Будем измерять высоту вдоль оси z, направленной от поверхности Земли (z = 0 ) вертикально вверх. Задача одномерная, и частные производные в (6.3) заменяются обычными: Fz dEdxп . Сила тяжести F - mg , по-
скольку ось z направлена противоположно направлению вектора силы тяжести. Поэтому F Fdz mgz const . Если выбрать начало отсчёта потенциальной энергии на поверхности Земли, то есть Еп = 0 при z = 0, то Еп = mgh, где h – фиксированное значение z, т.е. высота над поверхностью Земли.
Потенциальная энергия упругой деформации. |
Пусть пружина |
расположена вдоль оси Х, как показано на рис. 6.3. Сила F , вызы- |
|
вающая растяжение пружины и соответству- |
F |
|
|
|
F |
ющая положительному направлению оси Х, |
Х |
вызывает по закону Гука появление силы |
Рис. 6.3 |
|
упругости kx, направленной в противоположную сторону (то же и по отношению к сжатию). Поэтому потенциальная энергия упругой деформации определится как
|
|
|
Еп Fdx ( kx )dx |
kx 2 |
const . |
||||
|
|
|
|
||||||
|
|
|
|
|
2 |
|
|||
|
|
|
При отсутствии деформации пружины естественно положить |
||||||
Е |
|
0 |
, поэтому const 0 и E |
|
|
kx 2 |
. |
|
|
п |
п |
|
|
||||||
|
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
||
ГЛАВА 7 |
47 |
|
|
|
|
ГЛАВА 7. РОЛЬ ВНУТРЕННИХ СИЛ. ЗАКОНЫ
СОХРАНЕНИЯ ИМПУЛЬСА И МОМЕНТА ИМПУЛЬСА. МЕТОД ПОТЕНЦИАЛЬНЫХ КРИВЫХ. РЕЛЯТИВИСТСКАЯ ЭНЕРГИЯ.
ЭКВИВАЛЕНТНОСТЬ МАССЫ И ЭНЕРГИИ
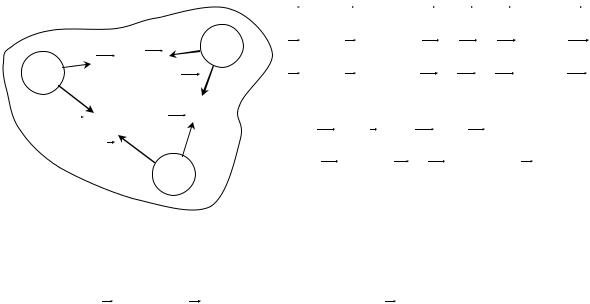
Рассмотрим систему из n материальных точек. Пусть внешние силы не действуют, а действуют только внутренние (рис. 7.1). Полные силы, действующие на точки 1, 2, 3, … n равны
|
|
|
F 1 |
d p1 / dt f12 |
f13 |
f14 |
... f1n |
|
f |
3 |
F 2 |
d p2 / dt f21 |
f23 |
f24 |
... f2n |
1 |
f31 |
|
|
|
|
|
|
13 |
f32 |
F 3 |
d p3 / dt f31 |
f32 |
f34 |
... f3n |
|
|
|
||||||
f |
|
f23 |
... |
|
|
|
|
|
Но f12 f 21 ... fjk |
fkj . Поэтому |
|||||
12 |
|
|
|||||
|
|
|
|
|
|
|
|
|
f 21 |
|
d pi / dt F1 F2 ... F внутр 0 |
||||
|
|
2 |
|||||
i
и, следовательно, под действием внутренних сил импульс системы измениться не может. Если система замкнутая, то по второму закону
Ньютона d p / dt F внешн 0, и поэтому p соnst . Это закон сохранения импульса. Однако, если взаимодействие имеет кратковременный характер или даже если внешние силы есть, но они компенсируют друг друга или же надлежащим выбором системы координат можно сделать так, что проекции внешних сил на направление движения будут равны нулю (а это всё равно, что внешних сил нет), то закон сохранения импульса соблюдается.
Рассмотрим кратковременное взаимодействие, имеющее важное значение в физике – соударение шаров. Если скорости ша-

48 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ров до удара совпадают по направлению с линией, соединяющей центры шаров, то такой удар называется центральным. Когда говорят об абсолютно упругом ударе, то это означает, что полная механическая энергия не может переходить в немеханические виды энергии (например, в теплоту или в энергию химических реакций). В этом случае внутренние силы системы в процессе взаимодействия дают обратимое преобразование кинетической энергии в потенциальную. Полная механическая энергия лишь перераспределяется. Абсолютно упругого удара в природе не существует, но во многих случаях потери механической энергии малы. И подобная идеализация является оправданной. Рассмотрим центральный абсолютно упругий удар двух шаров в проекции на какую-нибудь ось. Пусть шао m1 догоняет шар m2 и соответственно v1 > v2 . Скорости после удара обозначим как u1 и u2. Будем считать направление движения шаров положительным. Тогда из законов сохранения
p const m1v1 |
m2v2 |
m1u1 m2u2 ; |
|
|
||||||||||||||
E const |
m v 2 |
|
m v |
2 |
|
m u2 |
|
m u2 |
|
|
||||||||
|
1 1 |
|
|
2 |
2 |
|
|
1 1 |
|
2 2 |
. |
|
||||||
|
2 |
|
|
2 |
|
|
|
2 |
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из первого уравнения получим m1(v1 u1 ) m2 (u2 |
v2 ) , а из |
|||||||||||||||||
второго |
|
|
m (v 2 u2 ) m (u2 v 2 ) |
или |
||||||||||||||
|
|
|
|
|
1 |
|
1 |
|
1 |
|
|
|
|
2 |
|
2 |
2 |
|
m1(v1 u1 )(v1 u1 ) m2 (u2 |
v2 )(u2 |
v2 ). |
Поделив одно из этих со- |
|||||||||||||||
отношений на другое, получим v1 u1 u2 |
v2 |
и далее |
|
|||||||||||||||
u |
2m2v2 ( m1 m2 )v1 |
|
; u |
|
|
2m1v1 ( m2 m1 )v2 |
. |
|||||||||||
|
|
2 |
|
|||||||||||||||
1 |
m1 |
m2 |
|
|
|
|
|
|
|
|
|
|
m1 m2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Из этого результата следует, что при различных начальных скоростях v1 и v2 скорости после абсолютно упругого удара различны: u1 ≠ u2 . Если их приравнять, то будет v1 = v2 , и первый шар не догонит второй.

ГЛАВА 7 |
49 |
|
|
|
|
Неупругий удар предполагает переход части механической энергии в немеханические виды энергии. Следует отметить, что здесь наблюдаются различия в терминологии, и любой неупругий удар отождествляется с абсолютно неупругим. Иногда его определяют, отмечая, что после удара тела остаются неподвижными или же движутся с одинаковыми скоростями. Однако скорости после неупругого удара могут быть и различны. Например, если пуля пробивает деревянный брусок навылет, то оба тела движутся с различными скоростями, но удар неупругий, поскольку часть механической энергии переходит в тепло. Для соударения пластилиновых шаров, которые после движутся с одинаковой скоростью u, получим
|
|
|
|
|
|
m v 2 |
m v 2 |
|
|
|
|
m v |
m v |
|
( m m )u и |
1 1 |
|
2 2 |
( m m )u2 |
Q , |
|||
2 |
|
|
|||||||||
1 |
1 |
2 |
1 |
2 |
2 |
|
2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
где Q – немеханические виды энергии, в основном, тепло. Из основного уравнения (5.5) динамики dL / dt M следует, что для замкнутых систем, когда сумма моментов внешних сил M 0 , будет сохраняться момент импульса L , т.е. L const . Этот третий закон сохранения наиболее эффектно демонстрируется опытами со скамьёй Жуковского, представляющей собой вращающийся табурет, на котором усаживается человек с гантелями в обеих руках. Его момент инерции максимален, если руки широко расставить, и минимален, если руки прижать к телу. Если человека с расставленными руками «раскрутить» с некоторой угловой скоростью ω1, а затем попросить прижать руки к телу, то при таком изменении момента инерции J1 до меньшего значения J2 его угловая скорость возрастёт до значения ω2, т.к. J1 ω1 = J2 ω2 = сonst. Таким образом уменьшение момента инерции скомпенсируется увеличением угловой скорости.
50 ЧАСТЬ 1. МЕХАНИКА
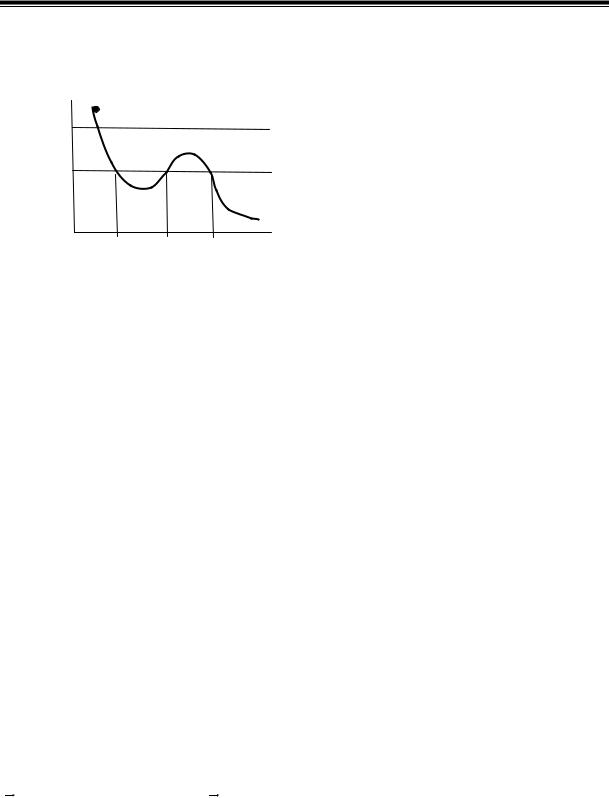
Метод потенциальных кривых. Знание хода зависимости по-
тенциальной энергии от координат даёт информацию о характере |
||||
Eп |
|
|
|
движения тела в заданной об- |
|
|
|
|
|
Е1 |
|
|
|
ласти пространства (например |
Е2 |
|
|
|
о характере движения частицы |
|
|
|
|
|
I II |
III |
IV |
|
внутри атома или молекулы). |
|
Рассмотрим наглядный при- |
|||
|
|
|
Х |
|
|
|
|
|
|
Рис. 7.2 |
|
|
|
мер. Представим себе шарик, |
скатывающийся по жёлобу (рис. 7.2). Так как вблизи поверхности Земли Еп = mgh, то высота жёлоба пропорциональна потенциальной энергии поля тяготения, в котором находится шарик, поэтому нарисованный жёлоб и график зависимости от координаты Еп = f(x) – это одно и то же. Если шарик поднять до уровня Е2 и отпустить, то его полная энергия Еп = Е2 превышает энергию, соответствующую «горбу» в области III (так называемую высоту потенциального барьера), и шарик, пройдя через барьер, оказывается в области IV. Если жёлоб имеет бесконечную протяжённость и Еп → 0 асимптотически, то область IV называют областью инфинитного (т.е. бесконечного) движения. /ная яма), то из этой ямы он «не выберется» и окажется в области II (финитное движение). Эти очевидные в данном примере типы движения (и совсем неочевидные в более сложных случаях) можно получить теоретически, что и придаёт ценность методу. Так, в II справа от минимума Еп возрастает и dЕп/dx > 0, а сила, действующая на шарик, F grad En ( dEn / dx )i и будет направлена влево. Аналогично, слева от минимума dЕп/dx > 0, а сила будет направлена вправо. Таким образом, минимум является положением устойчивого равновесия, так как отклонение в любую сторону вызывает силы, возвра-
ГЛАВА 7 |
51 |
|
|
|
|
щающие шарик в прежнее положение. Такой же анализ, проведённый для «горба», обнаружит наличие сил, уводящих от положения равновесия, которое будет неустойчивым.
Релятивистская энергия. Пусть скорость тела возрастает от 0 до v. Как известно (гл. 4), масса зависит от скорости и неограниченно увеличивается от значения массы покоя m0 при увеличении ско-
рости: m |
|
m0 |
|
|
|
|
, а кинетическая энергия определится как |
||||||||||||
|
|
|
|
|
|
|
|||||||||||||
1 |
v |
2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
к |
|
v |
|
|
|
v |
d |
|
v |
|
d s |
v |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Е |
|
|
|
( F d s ) |
|
|
|
( mv ) d s |
|
d( mv ) |
|
|
|
v d( mv ). |
|||||
|
|
|
0 |
|
|
|
0 |
dt |
|
0 |
dt |
0 |
U |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dW |
Проинтегрируем по частям по формуле ∫UdW = UW - ∫WdU. Получим
|
|
|
|
|
|
v |
|
v |
|
|
|
|
|
m0v |
2 |
|
|
|
|
|
|
v |
|
m0vdv |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Ек |
mv 2 |
mvdv |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
Вводя |
|
|
переменную |
|||||||||||||||||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
v |
2 |
|
|
|
|
|
0 |
|
|
|
1 |
v |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
z 1 (v / c )2 ; dz 2vdv / c2 , |
интегрируя и возвращаясь к исход- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m v 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m c2 |
|
1 |
v |
2 |
|
m c2 |
|
|||||||||||||||||||||
ной переменной, получим Е |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
2 |
|
|
|
0 |
|
|
|
|
c |
|
|
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
m |
c2 |
v 2 |
|
|
v 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
c2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
m |
c2 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
m |
c2 |
mc2 |
m |
c2 . (7.1) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
v 2 |
|
c |
|
|
c |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v 2 |
0 |
|
|
|
|
|
|
|
0 |
|
|||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Иначе, Ек = (m – m0)c2 = Е – Е0, и таким образом увеличение энергии может рассматриваться как увеличение массы, т.е. масса и энергия эквивалентны. Энергия Е0 = m0 c2 называется энергией покоя, Е = m c2 есть полная энергия тела, а кинетическая энергия есть их разность, т.е. энергия движения. Что касается потенциальной энергии, то она имеет такой же смысл, как и в нерелятивистском случае. Закон сохранения будет иметь вид m c2 + Еп = const. Часто полной энергией называют эту сумму, а не m c2 что, к сожалению,

52 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
приводит к путанице в терминологии. Этот закон можно записать в виде m1 c2 + Еп1 = m2 c2 + Еп2 , откуда Еп1 - Еп2 = (m2 – m1)c2. Таким образом, любое изменение потенциальной энергии системы частиц (например, перестановка частиц в ядре атома) можно истолковать как изменение массы системы, связанное с изменением её внутренней энергии. Получим теперь приближённое выражение для кинетической энергии при малых скоростях. Из формулы разложения в ряд
Тейлора при х << 1 cледует |
|
|
|
1 |
|
|
|
1 |
х 2 |
|
|
3 |
|
х 4 ... . |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 х 2 |
|
|
|
|
2 |
8 |
|
|
|
|||||
|
|
Оставляя два первых члена разложения, получим |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
||||
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
v |
|
m0v |
|
||||||||||
|
|
m |
|
|
|
|
|
m |
|
|
|
1 |
1 |
|
|
||||||||||||||
Е |
|
c2 |
|
|
|
|
c2 |
|
|
|
|
, |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
к |
0 |
|
|
|
2 |
|
|
|
0 |
|
|
|
|
2c |
2 |
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
1 |
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
т.е. известное классическое выражение. Что касается энергии покоя Е0 = m0 c2 , то следует отметить, что нерелятивистского аналога она не имеет. Эта огромная энергия включает все другие виды энергий (в том числе ядерную), которые в неявном виде заключены в покоящемся теле и эквиваленты его массе. Установим теперь связь между импульсом и полной энергией. Для этого запишем формулу
Е = m c2 в виде |
E |
|
|
m0 |
|
|
|
|
. Умножив обе части на v и возводя в |
|||||
c |
2 |
|
|
|
|
|
|
|
|
|||||
|
|
v |
2 |
|
||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
c2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
квадрат, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E 2 v 2 |
p2 . |
(7.2) |
||||||
|
|
|
|
|
|
|
c2 |
|
|
|
c2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
С другой стороны,