

Механика
.pdfГЛАВА 7 |
|
|
|
|
|
|
|
|
|
|
|
|
53 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 v 2 |
|
|
|
|
|
|
|
||||
|
m02v 2 |
|
|
m0 c |
|
|
|
|
|
p2 p2 |
v 2 |
m2c2 |
v 2 |
|
|
p2 |
|
|
c2 |
|
, откуда |
. Из последнего |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
1 |
v 2 |
|
|
1 |
v 2 |
|
|
|
|
c2 |
0 |
c2 |
|
||
c2 |
c2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
уравнения следует, что |
v 2 |
|
|
|
p2 |
|
. Подставляя это в (7.2), по- |
||
|
|
|
c2 p2 |
||||||
|
c2 |
m |
|
|
|
||||
|
|
|
0 |
|
|
|
|
|
|
лучим формулу «энергия через импульс» |
|
||||||||
|
|
|
|
|
|
|
|||
|
E |
|
m2c4 |
p2c2 . |
(7.3) |
||||
|
|
|
|
|
0 |
|
|
|
|
Из этой формулы следует так называемый ультрарелятивистский случай для частицы, движущейся со скоростью света. Такой
частицей |
является фотон (или гамма-квант). Его масса |
|
|
|
. Если сюда подставить v = c, то m → ∞ что при- |
m m0 / |
1 (v / c )2 |
|
водит к нелепому результату. Поэтому следует положить m0 = 0, что даст неопределённость в формуле для массы. Таким образом, m приобретает конечную величину. Энергия ультрарелятивистской частицы будет равна
E pc . |
(7.4) |
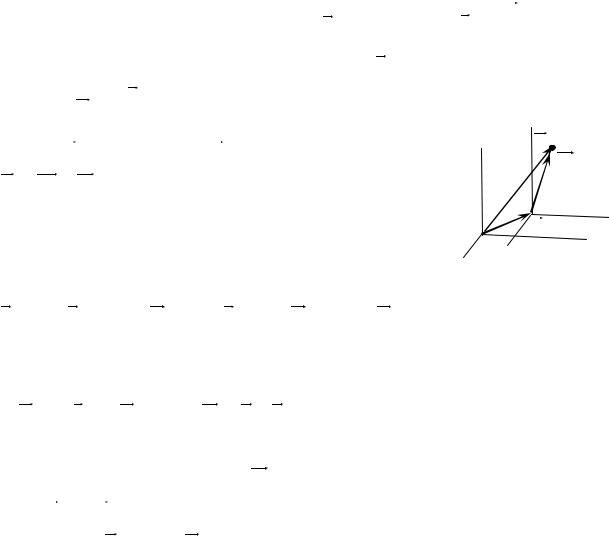
Кинетическая энергия простого вращательного движения. |
|
Рассмотрим вращение твёрдого тела с угловой скоростью ω вкруг некоторой оси (рис. 2.5). Линейная скорость любой его i – ой точки , будет равна по величине vi = ω ri , где ri - расстояние от этой точки до оси вращения и, кроме того, v << c.
Кинетическая энергия этой точки определится как
|
m |
v 2 |
m |
( r 2 ) |
|
|
|
|
|
|
|
|
|
|
|
|||
Eвращ |
i |
i |
|
|
i |
i |
|
, а для всего тела |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||||
iк |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
2 m r 2 |
|
|
2 |
|
|
|
|
|
||||
Eвращ Eвращ |
|
|
i |
|
i i |
|
J |
|
, где J |
– момент инерции |
||||||||
|
|
|
|
|
|
|
||||||||||||
к |
|
iк |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
тела относительно оси вращения. Полная кинетическая энергия: |
||||||||||||||||||
|
|
|
Е |
|
Е пост |
E вращ |
|
mv 2 |
|
2 |
||||||||
|
|
|
|
|
|
|
ц. инерции |
|
J . |
|||||||||
|
|
|
|
к |
|
к |
|
к |
|
|
2 |
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
54 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ГЛАВА 8. СИЛЫ ТРЕНИЯ.
ИХ РОЛЬ В ИНЖЕНЕРНОМ ДЕЛЕ
Трение никогда не проявляет себя самостоятельно. Оно сопутствует другим явлениям; благодаря ему, мы ходим по земле и ездим на автомобиле. Одновременно это один из важнейших видов сопротивления движению, приводящих к диссипации механической энергии – чаще всего превращению полезной энергии в тепло. Трение – главная причина изнашивания механизмов, одна из серьёзных проблем в инженерном деле. Существует несколько видов трения
вязкое |
статическое (трение покоя) |
|
Трение
сухое 

 скольжения динамическое
скольжения динамическое
качения
Силы сухого трения ранее объясняли взаимодействием микровыступов на поверхностях соприкасающихся тел. Казалось бы, чем лучше отшлифованы поверхности, тем меньше должно быть трение. Однако опыт показывает, что трение между хорошо отшлифованными поверхностями не уменьшается, а увеличивается. Поэтому трение обусловлено не только зацеплением поверхностей, но и взаимодействием на межмолекулярном уровне. В итоге силы трения сводятся к электромагнитному взаимодействию.
Сухое трение возникает между поверхностями соприкасающихся твёрдых тел. Если к лежащему на столе бруску приложить горизонтальную силу F меньше некоторого определённого значения 0 < F < Fmax , то брусок не сдвинется с места. Сила трения в этом интервале значений называется силой трения покоя. Её мак-
ГЛАВА 8 |
55 |
|
|
|
|
симальное значение зависит от материала тел и качества поверхностей. В большинстве случаев её величина пропорциональна силе реакции опоры (закон Амонтона – Кулона, 1699 г.): Fmax 0N , где коэффициент трения покоя 0 зависит от материала тел и качества поверхности и не зависит от площади соприкасающихся тел. Направлена эта сила против относительного виртуального перемещения, т.е. если брусок начнёт движение (хотя он и не движет-
F тр |
Fтр у |
|
|
N |
|
vx |
|
|
|
Х |
|
|
Fтр х |
|
|
|
|
Y |
|
F тр |
vy |
|
|
|
|
v |
|
mg |
|
|
|
|
|
|
|
Рис. 8.1 |
Рис. 8.2 |
|
|
ся вообще), то сила трения будет направлена в противоположную движению сторону. Наличие трения покоя характерно только для сухого трения. Когда тело начинает движение, трение покоя сменяется трением скольжения. Сила трения скольжения также пропорциональна N . но коэффициент уже будет другим. Обычно <0 , и сила не зависит от скорости, хотя есть и исключения. Сила трения скольжения направлена против относительного перемещения.
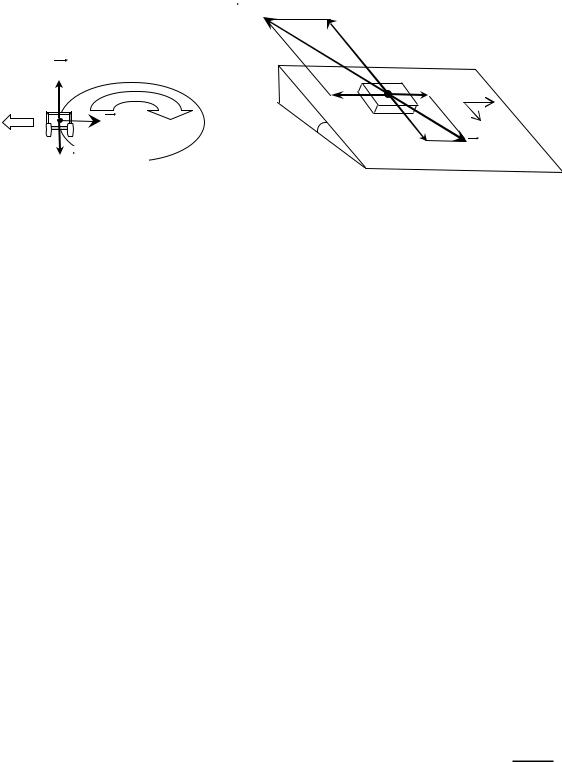
Явление заноса бывает двух видов.
1. Шофёр на большой скорости начинает резкий поворот в сторону, например вправо (рис. 8.1). Происходящий при этом занос влево (от центра кривизны радиуса R ) вызывает появление направленной к центру силы трения скольжения Fтр N mg .
56
По второму закону Ньютона mv 2 / R Fтр бежания заноса скорость должна быть v 

2. Другой тип заноса связан с движением по наклонной плоскости. Пусть на наклонной плоскости лежит брусок (рис. 8.2). Он
не будет скользить вниз, если только mg sin Fmax , где Fmax - максимальная сила трения покоя, направленная против возможного
виртуального движения бруска, т.е. против оси Y. Если теперь потянуть брусок за нить в направлении Х, то эта сила трения сразу исчезает, так как она должна быть направлена против возможного движения, которое в нашем случае происходит вдоль оси Х. Под действием составляющей силы тяжести mg sin и силы тяги вдоль Х тело будет двигаться «наискосок», причём F тр и v направлены в противоположные стороны и имеют соответствующие составляющие по Х и по Y. Этот тип заноса тоже часто встречается в шофёрской практике и имеет место, когда при трогании с места после длительной стоянки на наклонном участке дороги, которая за это время могла покрыться льдом, водитель начинает движение резким нажатием на газ. Проскальзывание колёс приводит к исчезновению силы
трения в поперечном направлении и к соскальзыванию вниз. |
|
|
||||||||
|
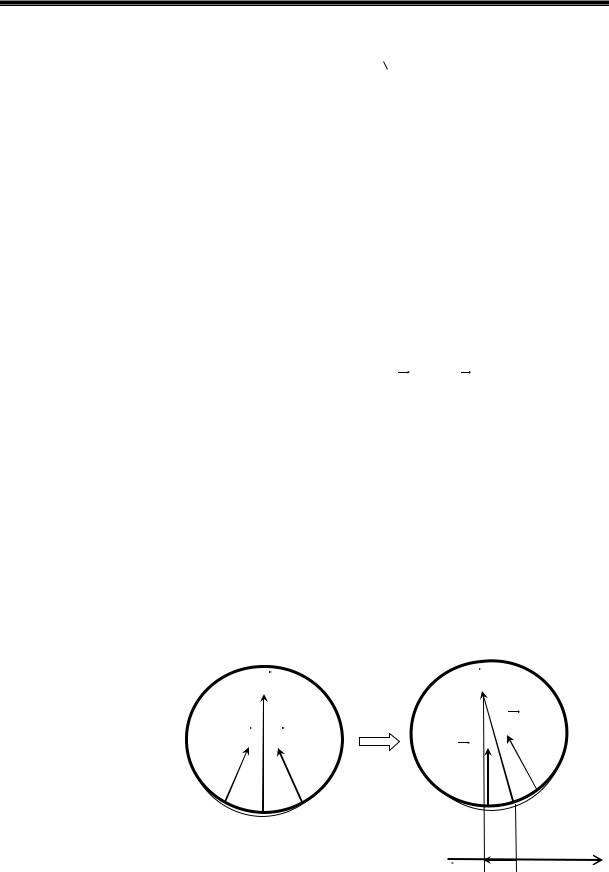
Трение качения |
обусловлено деформациями катящегося те- |
||||||||
ла и |
поверх- |
N |
а) |
N |
б) |
|||||
|
|
|
|
|
|
|||||
ности, по |
ко- |
F" F' |
|
|
|
F' |
|
|
||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
торой оно ка- |
|
|
|
F" |
|
|
||||
тится. |
Пусть |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
по дороге ка- |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
тится |
колесо |
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
(рис. |
8.3 |
), |
|
|
|
|
|
F тр к |
|
|
Если |
дефор- |
|
Рис. 8.3 |
|
|
|
||||
|
|
|
|
|
|
|
||||

ГЛАВА 8 |
57 |
|
|
|
|
мации упругие, то имеем симметричную картину (рис. 8.3 а). Каждой силе F' , действующей со стороны грунта, соответствует равная ей по величине и симметрично расположенная сила F" . Результирующая всех сил упругой деформации поверхности вертикальна и не имеет проекции на горизонтальное направление. Поэтому силы упругих деформаций цилиндра и плоскости при качении не создадут сопротивления качению, и в этом случае сила трения качения
0. В реальной ситуации деформации неупруги (рис. 8.3 б), картина распределения сил несимметрична, а сила реакции N имеет направленную назад горизонтальную составляющую – силу трения качения F тр к , которая выражается через коэффициент трения качения к , силу нормального давления и радиус цилиндра формулой Кулона Fтр к к N / R . Иногда трением качения называют суммарное сопротивление, возникающее при качении колеса, куда включается и трение скольжения, и аэродинамическое сопротивление, и другие силы, препятствующие движению.
Вязкое (жидкое, внутреннее) трение возникает при движении в жидкой или газообразной среде или же при движении слоёв жидкости и/или газа относительно друг друга. Характерной чертой такого трения является отсутствие трения покоя. Тело, плавающее в жидкости и имеющее значительную массу, начинает движение под действием очень малой силы. Вязкое трение возникает только при движении и всегда приводит к переходу механической энергии в тепловую, а силы трения зависят от формы тела, его скорости и вязкости среды. Рассмотрим две близкие друг к другу поверхности А и В, разделённые жидкостью или газом. Если под действием силы F поверхность А площадью S движется со скоростью v относительно параллельной ей покоящейся поверхности В , то сила тре-
58 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ния, приложенная к А, равна и противоположна F . Частицы, прилегающие к А , движутся со скоростью v , увлекаемые этой поверхностью. Частицы следующего слоя движутся уже с меньшей скоростью
и т.д. При этом сила F dvdx S . Здесь - коэффициент динами-
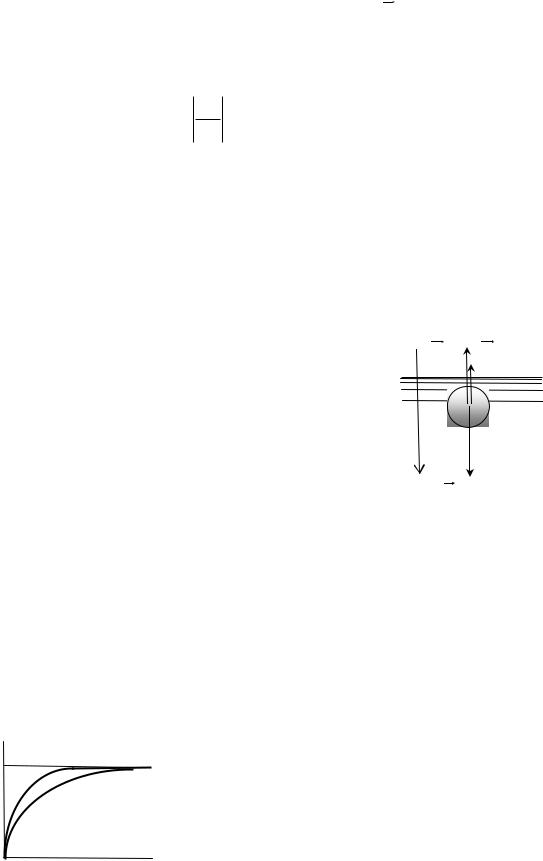
ческой вязкости, имеющий размерность кг / (м· с). Во многих случаях Fтр ~ v N , где N – целое число. В частности, сила, действующая на шарик, движущийся в вязкой среде, равна F 6 R v (формула Стокса). Рассмотрим этот случай (рис. 8.4). В проекции на ось Х
получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
m |
d 2 x |
|
mg F |
F |
или m |
dv |
F kv . Здесь |
||||||||||||||
dt 2 |
dt |
||||||||||||||||||||
|
|
|
|
|
|
|
A |
|
тр |
|
|
|
|
|
|
||||||
FA - сила Архимеда, |
k 6 R , |
F mg - FA . По- |
|||||||||||||||||||
делив на |
F и разделяя переменные, получим |
||||||||||||||||||||
|
|
dv |
|
|
|
F |
dt |
|
и |
|
F |
ln(1 |
k |
v ) const |
F |
t . |
|||||
|
1 |
kv |
|
|
|
m |
|
|
|
k |
|
F |
|
m |
|||||||
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Будем считать, |
что при t = 0 cкорость v = 0. То- |
||||||||||||||||||||
F A F тр
Х
mg
|
|
|
|
|
e |
k |
|
k |
|
||
|
|
|
|
|
t |
1 |
t . |
||||
гда const = 0. Из последнего соотношения следует |
m |
||||||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
F |
||
Окончательно получим зависимость, показанную на рис. 8.5: |
|||||||||||
v( t ) |
F |
1 exp( |
k |
t ) . |
|
|
|
(8.2) |
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
m |
|
|
|
|
|
|
|||
Таким образом, в отличие от сил сухого трения, в присутствии которых тело может увеличивать скорость вплоть до скорости света,
vℓimv |
|
|
действие |
сил вязкого |
трения приводит к |
||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
тому, |
что |
скорость асимптотически стре- |
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
η2 > η1 |
мится к |
предельному |
значению, равному |
||||
|
|
|
v im |
F |
|
|
mg FA |
|
|
|
|
t |
. |
|
|||||
|
k |
|
|
||||||
|
Рис. 8.5 |
|
|
6 R |
|
||||
|
|
|
|
|
|
|
|
||
ГЛАВА 9 |
59 |
|
|
|
|
ГЛАВА 9. |
НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА, |
|
ИХ ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ |
|
ДВИЖЕНИЕ. СИЛЫ ИНЕРЦИИ |
До сих пор мы имели дело с инерциальными системами отсчёта. Неинерциальной (НИСО) называется система отсчёта, движущаяся с ускорением относительно какой-нибудь инерциальной.
Ограничимся только нерелятивистским случаем (v << c ). |
|
|||||||||
|
НИСО, движущиеся поступательно. Пусть материальная точ- |
|||||||||
ка m движется относительно инерциальной системы |
К (рис. 9.1) и |
|||||||||
имеет скорость в этой ИСО, равную u , и ускорение a |
du |
, а НИСО |
||||||||
dt |
||||||||||
|
|
|
|
|
|
|
|
|
||
К’ движется поступательно со скоростью v и уско- |
|
|
|
|||||||
рением w |
dv |
. |
Относительно K’ скорость точки |
|
|
|
||||
|
|
|
K’ |
|||||||
|
|
|
dt |
|
|
|
|
|||
|
|
|
|
|
K |
R m |
||||
равна |
u' , а ускорение a' . Как следует из рисунка, |
|||||||||
|
|
R' |
||||||||
|
|
|
|
|
|
|
|
|
||
R R0 |
R' . |
Дифференцируя, получим соотноше- |
|
|
|
|||||
ния между скоростями и ускорениями точки в обе- |
|
|
R0 |
|||||||
|
|
|
|
|
|
|
|
|
||
их системах: |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Рис. 9.1 |
|||
|
|
|
|
|
|
|
||||
R R0 |
R' и |
R R0 |
R' . Соответственно |
|
|
|
||||
uаб с ол vперенос н u' от н |
и aа б с о л wп е р е н о с н a' о т н . Здесь мы индекса- |
|||||||||
ми уточнили названия скоростей и ускорений. В дальнейшем индексы опустим. Умножая на m, получим силы
ma' ma mw или F' F F ин . Это соотношение выражает основной закон динамики в НИСО. Согласно этому закону на точку m в НИСО K ’ действует сила F' , представляющая собой сумму двух сил: F ma - «обычная» сила, действующая в инерциальной системе К , и F ин mw - «новая» сила, называемая силой инерции.
60 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
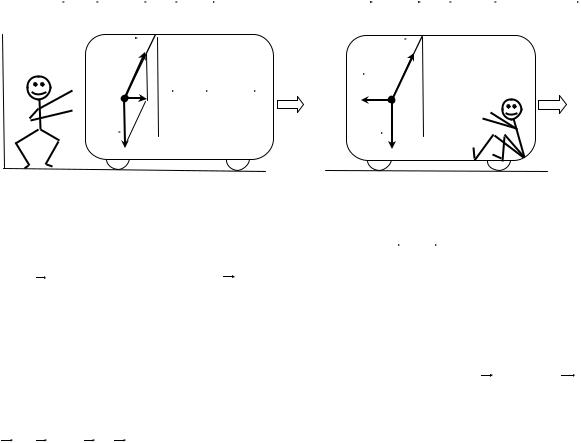
Таким образом, «старые» законы динамики можно применять и в НИСО, если только учитывать эту «новую» силу. Её можно считать особой силой. Она вызвана не взаимодействием тел или полей, как любая реальная сила, а ускоренным движением самой системы отсчёта, в которой развёртываются события. Силы инерции действуют только в НИСО. По отношению к силам инерции не существует сил реакции, т.е. противодействия, описываемого третьим законом Ньютона. В качестве примера рассмотрим равновесие маятника, подвешенного к потолку ускоренно движущегося вагона (рис. 9.2).
Система К : |
Система К ’ : |
ma T mg; a w. |
0 T mg F ин ; F ин mw. |
K |
T |
а) |
Т |
б) |
|
|
K’ |
||
|
|
|
|
|
|
|
R T mg |
F ин |
|
|
|
|
|
|
|
mg |
|
mg |
|
|
|
Рис. 9.2 |
|
|
Относительно |
неподвижного наблюдателя |
в ИСО К |
||
(рис. 9.2,а) маятник движется с ускорением a w под действием сил mg и натяжения нити T . Относительно вагона (K’ , рис. 9.2,б), где наблюдатель покоится, та же самая ситуация выглядит иначе. Здесь маятник покоится, находясь в отклонённом положении. Для описания состояния нужно ввести силу инерции F ин mw , направленную против движения вагона. Условие равновесия будетF T mg F ин 0. Одна и та же ситуация описывается поразному.
ГЛАВА 9 |
61 |
|
|
|
|
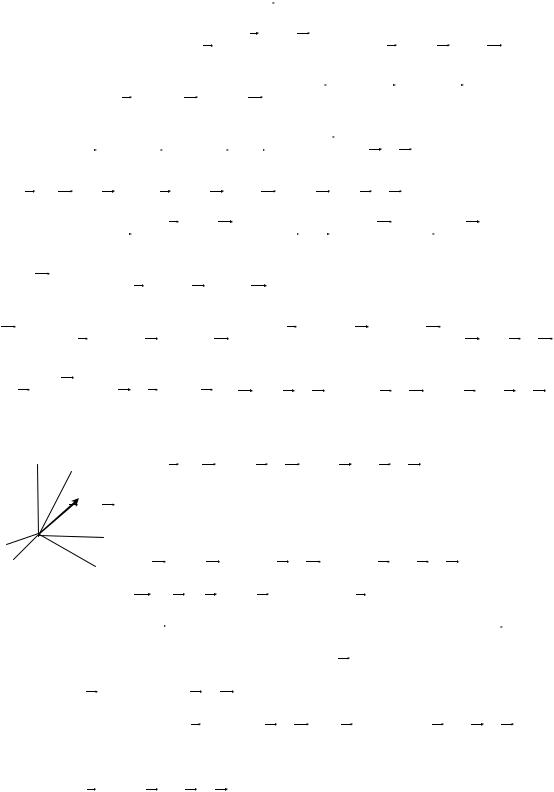
Вращающиеся НИСО. Пусть K’ вращается относительно К с постоянной угловой скоростью , имея общее начало с К (рис. 9.3).
Скорость точки m равна v |
|
|
d r |
|
dr' |
|
|
|
d |
( x' i' y' |
j' z' k' ) |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
dx' |
|
i' |
dy' |
|
|
j' |
dz' |
|
k' x' |
di' |
y' |
d j' |
z' |
dk' |
. |
|
(9.1) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt |
|
dt |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
||||||||||||||
Так как |
|
|
dx' |
i' |
dy' |
|
j' |
dz' |
|
|
k' v' |
|
и |
|
|
d r' |
|
|
[ r' ] , то из (9.1) : |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
v v' [ ( x' i' y' |
j' z' k' )] v' [ r' ] . |
|
|
|
|
|
(9.2) |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Ускорение a |
dv |
|
|
|
dv' |
|
d |
|
[ r' ] |
dv' |
|
[ |
dr' |
] , |
(9.3) |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
||||||||||||
где |
dv' |
|
|
|
d |
(v |
|
|
' i' v |
|
|
|
' j' v |
' k' ). |
По аналогии с (9.1) получим |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
x |
y |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
dt |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
dv' |
|
dv' |
|
|
|
|
|
dv'y |
|
|
|
|
dv' |
|
|
|
|
|
|
|
|
d i' |
|
|
|
|
' |
|
|
d j' |
|
|
|
|
d k' |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
x |
|
i' |
|
|
|
|
|
|
j' |
|
|
|
z |
k' v' |
|
|
|
v |
|
|
|
|
|
|
v' |
|
|
|
a' [ |
v' ] |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
dt |
|
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
x |
|
dt |
|
|
|
|
|
dt |
|
|
|
z |
dt |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
и [ |
d r' |
|
] [ v ] [ (v' [ r' ])] |
[ v' ] [ [ r' ]] . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя последние соотношения в (9.3), получим |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a a' 2[ v' ] [ [ r' ]] . |
(9.4) |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
r |
|
r' |
|
|
|
Умножая на массу m и преобразовывая, получим |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
окончательно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
Рис. 9.3 |
|
|
|
|
ma' ma' 2m[ v' ] m[ [ r' ]] |
или |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F' F F к ор F цб .Здесь a - абсолютное ускорение |
||||||||||||||||||||||||||||||||||||||||||||
(относительно К ), |
|
F - сила, действующая на точку в К , a' - относи- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
тельное ускорение (относительно К’), |
|
|
F' |
|
|
- сила, |
действующая на |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
точку в К' ; F к ор 2m[ v' ] - сила инерции Кориолиса, которой соответствует ускорение aкор 2[ v' ] ; F цб m[ [ r' ]] - центробежная сила инерции, которой соответствует центробежное ускорение aцб [ [ r' ]] . Таким образом, при вращательном движении действуют не одна, как при поступательном, а две силы
62 ЧАСТЬ 1. МЕХАНИКА
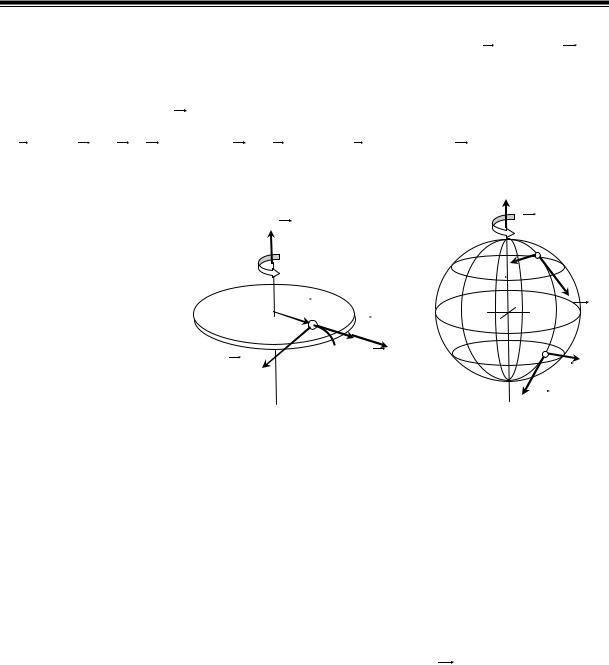
инерции. Если кроме вращательного есть ещё и поступательное движение, то в (9.5) следует добавить и силу инерции F ин mw . Пусть точка m движется вдоль радиуса карусели, вращающейся с угловой скоростью , см. рис. 9.4. Тогда по формуле (5.1) получим
aцб [ [ r' ]] 2 r' |
и F ц б maц б |
m 2 r' (от центра). |
||||||||
Действие |
кориоли- |
|
|
|
|
|
|
|
|
|
совой силы |
инер- |
|
|
|
N |
|
||||
ции, обусловленной |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
движением |
вдоль |
|
|
|
|
|
||||
|
|
|
|
F к ор |
|
|||||
земной поверхности |
|
r' m |
v' |
|
|
|
|
v' |
||
|
|
|
|
|
||||||
в меридиональном |
|
|
|
|
|
|
|
|||
|
|
F ц б |
|
|
|
|||||
|
|
|
F кор |
|
F к ор |
|||||
направлении, |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
S |
|
|
|
||
наблюдается в раз- |
|
|
|
|
v' |
|||||
|
|
|
|
|
|
|
|
|||
личных |
природных |
Рис. 9.4 |
|
|
Рис. 9.5 |
|||||
|
|
|
|
|
|
|
|
|||
и иных явлениях. Так, река Волга, текущая в среднем течении с севера на юг имеет высокий крутой правый берег с оврагами и оползнями, что обусловлено действием кориолисовой силы, направленной с востока на запад (рис. 9.5) и приводящей к сильному размытию правого берега. Левый же берег – низкий и пологий. На экваторе сила Кориолиса равна нулю, а в южном полушарии меняет направление ( при том же направлении вектора v' ). Сила Кориолиса вызывает боковое отклонение дальнобойной баллистической ракеты, летящей вдоль меридиана, а также сильный износ одного из рельсов железной дороги с преимущественным движением поездов в каком-либо одном меридиональном направлении.