

Механика
.pdfГЛАВА 4 |
33 |
|
|
|
|
станке. (рис. 4.8). Функция у(х) является образующей. Будем считать такое тело сплошным и имеющим заданную объёмную плотность ρ . Момент инерции элементарного тонкого сплошного диска толщиной dx равен dJ 21 y 2dm 21 y 2 y 2dx . Момент инерции всего тела
вращения J 1 x2y 4 ( x )dx .
2 x1
Интеграл берётся в пределах «нужного участка» области изменения функции. Телами вращения являются также правильные геометрические фигуры, например такие, как конус или шар. Для конуса радиусом R и высотой Н образующей является линейная функция y HR x . Интегрируя по х от нуля до Н, получим J = 0,3MR2. Аналогичным образом для шара получим J = 0,4MR2.
Y |
y(x) |
|
r =y
X
x1 |
x2 |
dx
Рис. 4.8
34 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ГЛАВА 5. |
СВЯЗЬ МОМЕНТА ИМПУЛЬСА И МОМЕНТА |
|
ИНЕРЦИИ. ОСИ УСТОЙЧИВОГО ВРАЩЕНИЯ. |
|
ОСНОВНОЙ ЗАКОН ДИНАМИКИ |
|
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ. ГИРОСКОП |
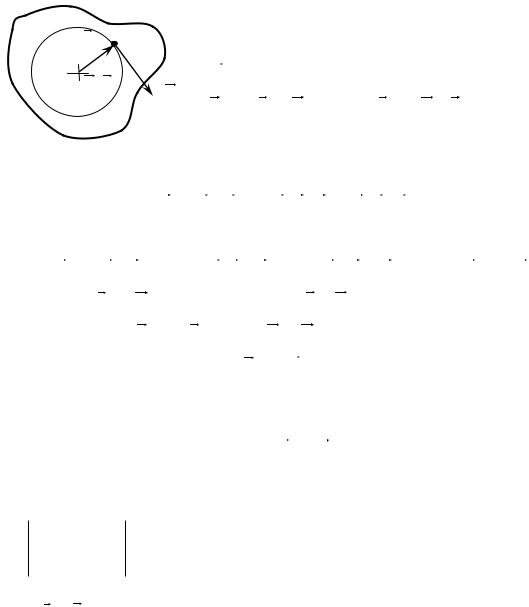
Простое вращательное движение. Рассмотрим точку mi, принадлежащую телу, вращающемуся вокруг оси, перпендикулярной чертежу, как на рис. 5.1. Напомним, что крест в кружочке означает направление «от нас». Такое направление
r i mi |
|
имеет угловая скорость точки и всего тела |
||||
,L |
|
, |
а |
также |
момент |
импульса |
pi |
|
|
|
|
|
|
|
Li |
[ r i pi |
] mi [ r i [ r i ]] . |
Двойное |
||
|
|
|||||
Рис. 5.1 |
|
векторное |
произведение раскрывается по |
|||
|
|
|
|
|
|
|
|
|
математической формуле |
|
|||
|
[ a [ b c ]] b( a c ) c( a b ) , |
(5.1) |
||||
известной у студентов как «бац минус цаб». Применяя её, получим
m [ r i [ r i |
]] m ( r i r i ) m r i ( r i ) m r |
2 J |
. (5.2) |
||
i |
i |
i |
i i |
i |
|
Поскольку r i |
и cos 90°=0, то ( r i |
) 0 . Для всего тела |
|||
L Li |
Ji Ji J , |
|
(5.3) |
||
И таким образом векторы L и имеют одинаковое направление, что справедливо только для простого вращательного движения.
Сложное вращательное движение. Здесь имеет место вращение не
вокруг оси, а вокруг точки. Векторы r i и уже не будут взаимно перпендикулярны и их скалярное произведение в (5.2) не будет равно нулю. Чтобы теперь описать свойства вращательного движения вместо скалярной величины J, которой мы пользовались раньше, необходимо будет ввести матрицу
Jxx Jxy Jxz
J Jyx Jyy Jyz . Такие величины называются тензорами. Компоненты Lx, Ly,
Jzx Jzy Jzz
Lz сложным образом определяются через компоненты тензора инерции J. Вектора L и уже в общем случае не будут коллинеарны. Более «осязаемым»
ГЛАВА 5 |
35 |
примером тензорной величины является показатель преломления n. Если на кусок стекла падает свет, то известный закон преломления выполняется независимо от того, с какой стороны падает луч, т.е. n = const независимо от направления в пространстве. Не для всех сред это верно. Например, показатель преломления кварца будет различным для различных направлений и задаётся тензором n. Для любого тела можно выбрать три взаимно перпендикулярные оси, когда в тензоре ненулевыми остаются только три диагональных компоненты Jxx, Jyy и Jzz. Рассмотрим этот случай.
Существуют три взаимно перпендикулярные оси - главные
оси инерции (см. Таблицу). |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Г Л А В Н Ы Е О С И И Н Е Р Ц И И |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объект |
|
|
|
|
|
|
Jx |
|
|
|
|
|
Jy |
|
|
|
|
|
|
Jz |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тонкий обруч |
|
|
|
|
|
MR 2 |
|
|
|
|
|
MR 2 |
|
|
|
|
|
MR 2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Сплошной диск |
|
|
|
|
|
MR 2 |
|
|
|
|
|
MR 2 |
|
|
|
|
|
|
MR 2 |
|
|
|||||||||||||
|
|
Y |
|
|
|
4 |
|
|
|
2 |
|
|
|
|
4 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Стержень |
|
|
|
|
|
|
0 |
|
|
|
|
MR 2 |
|
|
|
|
|
|
MR 2 |
|
|
|||||||||||||
|
|
Y |
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
12 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Шар |
|
|
|
|
2 |
MR 2 |
|
|
|
2 |
MR 2 |
|
|
|
|
2 |
MR 2 |
|
||||||||||||||||
|
|
Y |
|
|
|
5 |
|
|
5 |
|
|
|
5 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Параллелепипепед |
|
|
1 |
M( b2 h2 ) |
|
1 |
M( a2 b2 ) |
|
1 |
|
M( a2 h2 ) |
|
||||||||||||||||||||||
|
|
|
Y |
|
|
|
|
|
|
|
12 |
12 |
12 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
Х |
|
(min) |
(max) |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
a > b > h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
(по X,Z,Y соотв.) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36 ЧАСТЬ 1. МЕХАНИКА
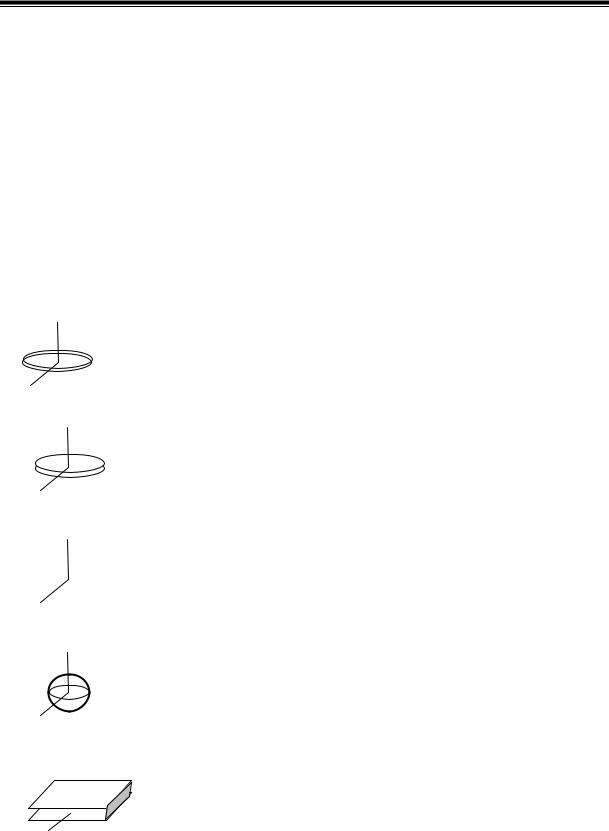
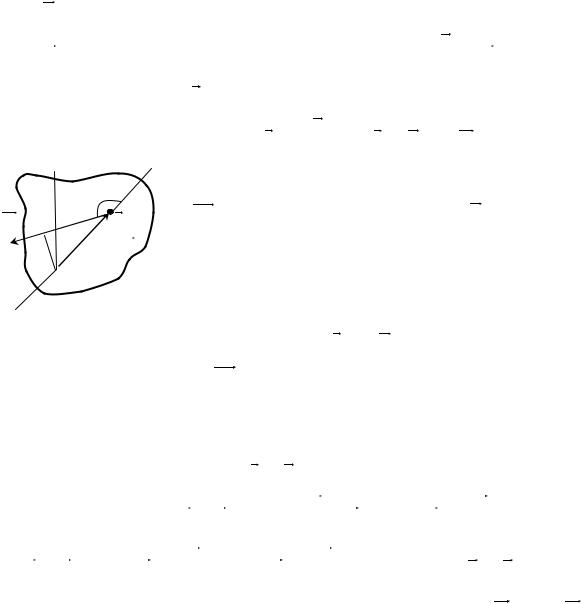
Эти оси для тел правильной формы совпадают с осями геометрической симметрии и характеризуются тем, они определяют устойчивость вращения что необходимо для инженерных приложений, когда важно, чтобы не было биений, а с ними и преждевременного износа подшипников и искривления механических осей. Соответствующие этим осям моменты инерции также называются главными. Если все три главных момента различны (например, у параллелепипеда), то устойчивое вращение имеет место относительно двух осей, соответствующих максимальному и минимальному главному моменту. В этом можно легко убедиться, подбрасывая вверх коробку, одновременно сообщая ей быстрое вращение вокруг одной из главных осей. Если две из трёх компонент одинаковы, то устойчивое вращение соответствует оси с максимальным моментом инерции. Так если тонкий стержень подвесить к вертикальной оси мотора, а затем включить мотор, то стержень, повращаясь некоторое время в своём начальном вертикальном положении, займёт затем положение горизонтальное – соответствующее его максимальному моменту инерции ML2 / 12.
|
d |
|
Теорема Гюйгенса – Штейнера. При констру- |
|
|
ировании вращающихся узлов в инженерных кон- |
|
|
струкциях часто возникает необходимость рассчи- |
А О |
|
|
||
тать момент инерции относительно оси не прохо- |
Рис. 5.2 |
|
дящей через центр инерции; при этом момент |
||
|
инерции относительно оси, проходящей через центр инерции, известен (например, эксцентрик на рис. 5.2). Известно также расстояние между осью вращения А и параллельной осью О, проходящей через центр инерции. Рассмотрим произвольную точку mi, принадлежа-
ГЛАВА 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mi |
|
|
|
щую телу массой М. На рис. 5.3 показана |
||||||||||
|
|
|
плоскость, перпендикулярная обеим осям и |
|||||||||||
|
R i |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r i |
|
|
|
проходящая через mi. Из рисунка видно, что |
||||||||||
A |
d |
|
O |
Ri |
d r i . |
|
По |
теореме |
косинусов |
|||||
|
r |
|
|
R |
|
d |
|
2( d Ri ). Умножим обе части |
||||||
|
Рис. 5.3 |
|
|
i |
2 |
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
на mi и просуммируем по всем точкам тела: |
|
|
||||||||||||
m r 2 m R2 d 2 |
m 2( d m Ri ) . |
|
||||||||||||
|
i i |
i |
i |
|
|
|
|
i |
|
|
|
i |
|
|
Здесь суммы m r 2 |
J |
A |
; m R2 J |
O |
- моменты инерции для про- |
|||||||||
|
i |
i |
|
|
|
|
i |
i |
|
|
|
|
||
стого вращательного движения относительно осей А и О |
соответ- |
|||||||||||||
ственно. |
Сумма |
mi Ri |
MRЦ. инерции по |
определению центра |
||||||||||
инерции (4.1). Но радиус-вектор центра инерции относительно оси, проходящей через центр инерции равен нулю. Поэтому
|
J |
A |
J |
O |
md 2 |
- |
теорема Гюйгенса – Штейнера. |
|
|||
|
|
|
|
|
|
|
|
|
|||
|
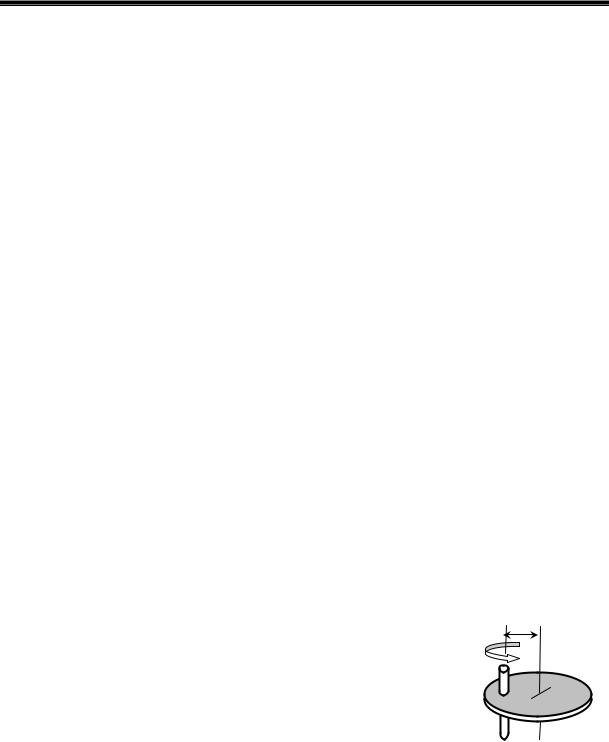
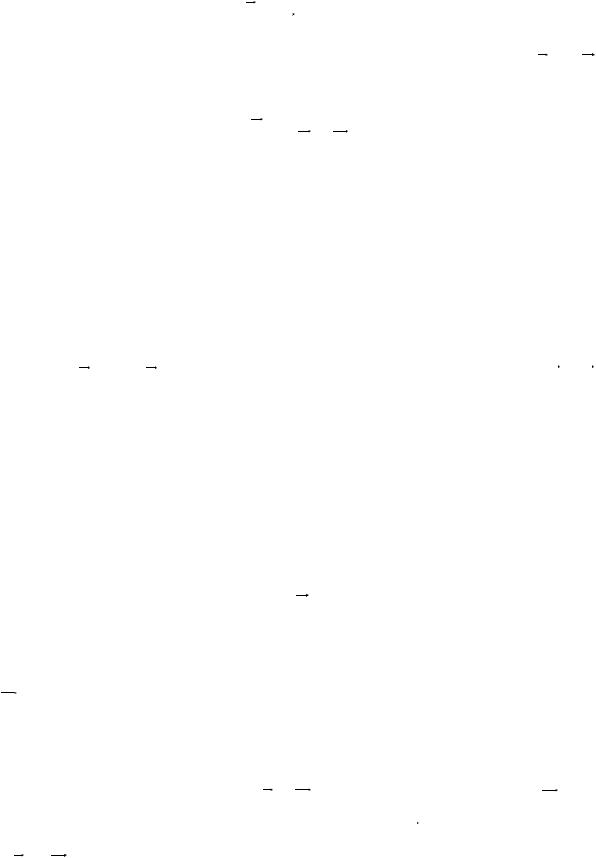
Собственный и орбитальный момент импульса. Рассмотрим |
||||||||||
вращение тела, например Зем- |
|
|
L |
||||||||
|
|
|
|
|
|
|
|
|
Ls ; |
||
ли, по орбите вокруг Солнца и |
|
|
|||||||||
|
|
Lo |
|||||||||
|
|
|
|
|
|
|
|
|
p |
||
одновременно вращение вокруг |
Lo |
Ls |
|||||||||
З. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
собственной |
|
оси (рис. |
5.4). В |
|
r |
|
|||||
|
|
|
|
|
|
|
|
|
|
||
этом |
случае |
говорят |
о соб- |
☼ |
|
|
|||||
ственном |
моменте |
импульса |
С. |
|
|
||||||
(или |
собственном |
механиче- |
|
Рис. 5.4 |
|
||||||
ском |
|
|
моменте) |
|
равном |
|
|
||||
|
|
|
|
|
|
||||||
Ls J . Движение Земли вокруг Солнца характеризуется орби-
тальным моментом Lo [ r p ] . Полный |
момент импульса |
L Ls Lo и получается сложением векторов, |
как это показано на |
рисунке справа. Особую роль момент импульса играет в мире микрочастиц, каковыми являются атомы и молекулы. Там также спра-
38 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ведливо сказанное здесь, однако появляются некоторые новые закономерности.
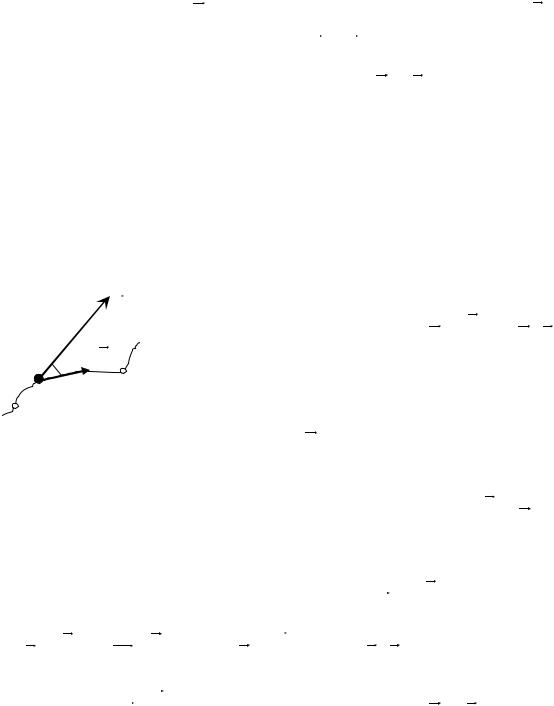
Основной закон динамики вращательного движения. Рассмотрим твёрдое тело, вращающееся вокруг точки О, совпадающей с началом системы отсчёта (рис. 5.5). Предположим, что известны силы F i , действующие на каждую точку тела mi , радиус-вектор ко-
торой r i . Тогда по второму закону Ньютона m |
|
|
dv i |
F i . Умножим |
|||||
i |
dt |
||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
обе части векторно на r i : |
|
|
|
|
|
|
|
|
|
m |
[ r t |
dv i |
] [ r t F i ] M i . |
(5.4) |
|||||
|
|||||||||
i |
|
dt |
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
αОпределённая таким образом
Fi |
|
|
mi |
на Mi называется моментом силы F i относи- |
|
|
|
r i |
|||
|
|
|
|||
|
d |
М |
тельно точки О. Единица измерения момента |
||
|
|
|
|
||
|
|
|
|
|
силы |
|
|
|
|
|
|
|
|
|
|
|
[M ] = кг·м2 | c2 = Н·м (ньютонометр). Если, к |
|
Рис. 5.5 |
|
|
примеру, векторы r i и F i расположены в плос- |
|
|
|
|
|
|
|
кости чертежа, то вектор Mi направлен «к нам» как это следует из кратчайшего поворота буравчика от первого вектора ко второму. Его
величина Mi ri Fi |
sin Fi d , где d - плечо силы. Для той же части- |
|||||||||||||||||||||
цы момент импульса Li |
mi [ r i v i |
] . После дифференцирования |
||||||||||||||||||||
получим |
dLi |
|
m |
|
d |
[ r i |
v i ] m |
[ |
d r i |
|
v i ] m |
[ r i |
dv i |
] = |
||||||||
|
|
i |
|
|
|
|
||||||||||||||||
|
|
dt |
|
|
|
dt |
|
|
i |
|
|
dt |
|
i |
|
dt |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
m |
[v i v i ] m |
[ r i |
dv i |
] m |
[ r i |
dv i |
] , поскольку [v i v i ] 0 . |
|||||||||||||||
|
|
|||||||||||||||||||||
i |
|
|
|
i |
|
|
|
|
dt |
|
i |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Сравнивая |
последнее |
выражение |
|
с |
(5.4), получим dLi / dt M i . |
|||||||||||||||||
Суммируя по всем точкам, получим уравнение динамики враща-
тельного движения в самом общем виде:
ГЛАВА 5 |
|
39 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dL |
|
M . |
(5.5) |
||
|
dt |
|||||
|
|
|
||||
Для простого вращательного движения, как видно из (5.3), |
L J . |
|||||
Поэтому |
|
|
||||
J |
d |
J M . |
(5.5а) |
|||
dt |
||||||
|
|
|
|
|||
Это уравнение играет в динамике вращательного движения такую же роль, как второй закон Ньютона в динамике поступательного движения. Импульсу p (характеристике запаса поступательного движения) соответствует момент импульса L (мера запаса вращательного движения). Другие соответствия а →β, F → M, m →J также очевидны. Уравнение (5.5) является аналогом второго закона в форме d p / dt F , а уравнение (5.5а) соответствует форме ma F .
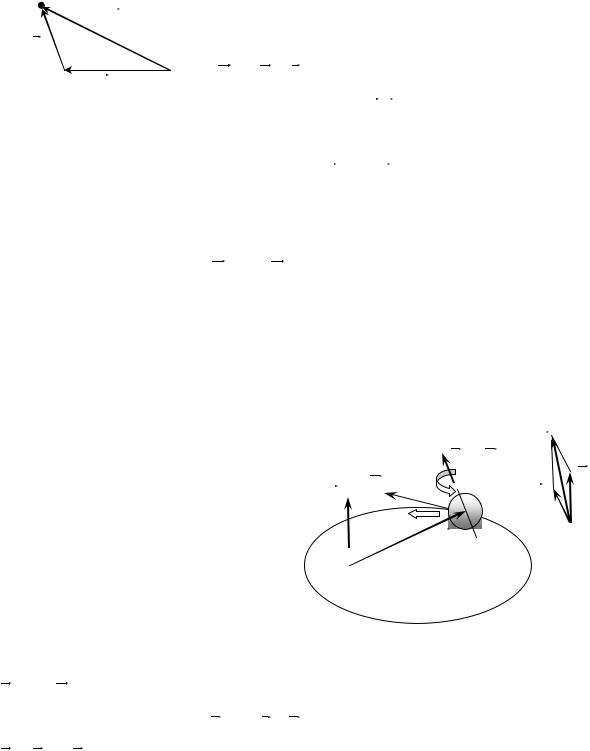
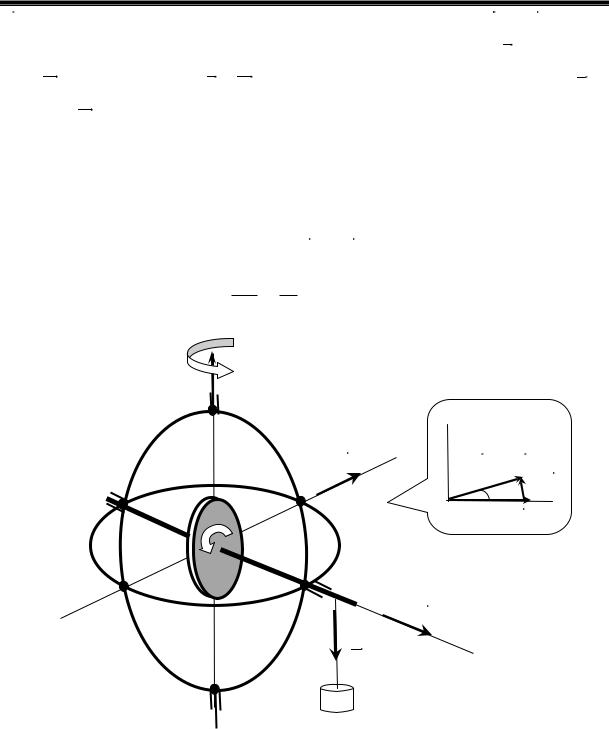
Гироскоп. Это очень важный прибор, широко применяемый в инженерном деле. Он представляет собой быстро вращающийся волчок (рис. 5.6), являющийся в реальных устройствах ротором электромотора. Закрепление волчка в кардановом подвесе (рис. 5.5) обеспечивает возможность свободного вращения гироскопа вместе со своей осью вокруг координатных осей. Если к оси гироскопа приложить некоторую силу F (например, подвесить грузик), то возникает момент этой силы. Проведя радиус-вектор из центра системы к точке приложения силы, определим направление вектора М момента силы, пользуясь правилом буравчик. Он перпендикулярен оси волчка и направлен «от нас» вдоль оси Z . Если записать уравнение динамики вращательного движения (5.5) для малых конечных приращений в виде L M t , то видно, что момент M обусловливает приращение момента импульса L . При этом векторыL и M имеют одинаковое направление – вдоль Z . При выбранном на рисунке направлении вращения волчка вектор момента импульса
40 ЧАСТЬ 1. МЕХАНИКА
L направлен слева направо – вдоль оси волчка. Как L и M , он лежит в горизонтальной плоскости YOZ , и прибавление к L приращения M t даст вектор L M t , который повернулся от вектора L к вектору M на угол в горизонтальной плоскости. Таким образом, наличие постоянного момента силы вызывает вращение всего гироскопа вместе с его осью в горизонтальной плоскости вокруг вертикальной оси Х. Такое движение называется прецессией. Для малого угла получим tg ≈ = M t / L . Поэтому угловая скорость
прецессии lim |
|
d |
|
M . |
|
|
t 0 |
t |
dt |
|
L |
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
Z |
|
|
|
|
|
М |
L L |
L |
|
|
|
|
|
α |
|
|
|
|
|
|
Y |
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
L
Y
F
Рис. 5.6. Гироскоп
И таким образом, если нет момента силы, то нет и прецессии. Если у прецессирующего гироскопа грузик снять, то прецессионное движение прекращается немедленно: никакого движения «по инерции» не будет. Если изменить направление момента силы на проти-
ГЛАВА 5 |
41 |
|
|
|
|
воположное (перевесить грузик на другую сторону), то изменится и направление прецессии. Кроме гироскопа в кардановом подвесе, большое распространение получили гироскопы на коромысле с противовесом, описываемые сходным образом.
Быстро вращающийся гироскоп является очень устойчивой системой и используется в конструкциях гирокомпасов, которые применяются там, где использование обычных магнитных компасов невозможно. Гироскопическая устойчивость обеспечивает возможность езды на велосипеде, а также возможность создания гироскопического монорельсового транспорта. Свойства гироскопа используются в системах автоматического регулирования, например в автопилоте. Сигнал ошибки , возникающий при изменении заданного курса, поступает на гироскоп в виде момента силы, вызывающего прецессию. Прецессионный поворот гироскопа приведёт к включению систем, меняющих курс самолёта до тех пор, пока не исчезнет сигнал ошибки, а с ним и прецессия. Гироскопическую прецессию совершает и брошенный австралийский бумеранг. Благодаря сечению бумеранга, которое такое же, как у крыла самолёта возникает дополнительная сила, аналогичная подъёмной. Эта сила при правильном броске бумеранга вызывает момент силы, который и обусловливает прецессионное движение бумеранга по круговой орбите, что приводит к возвращению бумеранга в точку бросания.
42 |
ЧАСТЬ 1. МЕХАНИКА |
|
|
|
|
ГЛАВА 6. |
РАБОТА И МОЩНОСТЬ. ПОТЕНЦИАЛЬНЫЕ |
|
СИЛЫ. ЭНЕРГИЯ. ЗАКОН СОХРАНЕНИЯ |
|
ЭНЕРГИИ |
Работой силы F на элементарном перемещении d s называется скалярная величина dA ( F d s ) F ds cos . Работа на
|
2 |
2 |
конечном участке 1-2 равна |
A12 dA ( F d s ). Единицей работы |
|
|
1 |
1 |
является джоуль: [A ] = H· м = кг · м2 / c2= Дж. Следует отметить, что работа в физическом понимании этого термина не всегда соответствует обывательским представлениям. Работа человека, несущего в горизонтальном направлении груз, равна нулю, поскольку направление перемещения перпендикулярно направлению силы тяжести.
Быстрота выполнения работы называется мгно-
F
|
|
|
венной мощностью P |
dA |
( F |
d s |
) ( F v ) , ко- |
|
|
|
|
|
|||
m |
α |
d s |
|
dt |
|
dt |
|
|
|
|
|
|
|||
|
|
2 |
торая измеряется в ваттах: [P ] = Дж/c. |
||||
1 |
|
|
Пусть на некоторую материальную точку m |
||||
Рис. 6.1 |
действует сила F . Будем считать систему изоли- |
||||||
|
|
|
|||||
рованной, т.е. находящейся вне поля действия каких-либо иных
внешних сил. Тогда по второму закону Ньютона |
m |
dv |
F . Будем |
|
dt |
||||
|
|
|
пока считать, что v << c |
и поэтому m = m0 = const. Умножим теперь |
||||||||||||||||||||||||||||||||
обе части уравнения скалярно на скорость v |
d s |
: |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
||
|
|
|
dv |
|
|
|
d s |
|
|
dv |
|
1 d |
|
|
|
|
|
d |
|
|
2 |
|
|
||||||||||
m(v |
|
) ( F |
). Но |
(v |
) |
(v |
v ) |
|
v |
|
|
. Поэтому |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
dt |
|
|
|
|
dt |
|
|
dt |
|
2 dt |
|
|
|
|
|
dt 2 |
|
|
|||||||||||
|
d |
|
|
|
2 |
|
|
|
|
d s |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
|
v |
|
|
|
( F |
|
|
|
|
|
|
|
mv |
|
|
( F |
d s ) . Физическое |
||||||||||||||||
m |
|
|
|
|
|
|
|
|
|
|
) и окончательно d |
|
|
|
|
||||||||||||||||||
|
dt |
2 |
|
|
|
|
dt |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||