

Prezentatsia_IG_KhN_KhO_KhP_KhM_2013
.pdfТема №5 «Методы преобразованиѐ
проекций»
1.Понѐтиѐ и определениѐ.
2.Метод перемены плоскостей проекций.
3.Метод плоскопараллельного перемещениѐ. Вращение вокруг проецируящих прѐмых.
61
1. Понѐтиѐ и определениѐ
Решение многих задач способами начертательной геометрии, в конечном счете, сводитсѐ к определения позиционных и метрических характеристик. Известно, что определение взаимного расположениѐ геометрических элементов значительно проще при частном их расположении относительно плоскостей проекций.
Существует 2 метода преобразованиѐ чертежа:
1. МЕТОД ПЕРЕМЕНЫ (замены) ПЛОСКОСТЕЙ ПРОЕКЦИЙ – проецируемые предметы НЕ менѐят своего положениѐ в пространстве относительно плоскостей проекций, а вводѐтсѐ новые плоскости проекций, относительно которых объект занимает частное положение.
2. МЕТОД ПЛОСКОПАРАЛЛЕЛЬНОГО ПЕРЕМЕЩЕНИЯ – |
плоскости проекций |
НЕПОДВИЖНЫ, а проецируемые предметы перемещаят |
относительно них |
до требуемого положениѐ. |
|
4 основные позиционные задачи начертательной геометрии: |
|
1.Прѐмуя общего положениѐ преобразовать в прѐмуя УРОВНЯ.
2.Прѐмуя общего положениѐ преобразовать в ПРОЕЦИРУЮЩУЮ ПРЯМУЮ.
3.Плоскость общего положениѐ преобразовать в ПРОЕЦИРУЮЩУЮ.
4.Плоскость общего положениѐ преобразовать в ПЛОСКОСТЬ УРОВНЯ.
62
|
|
|
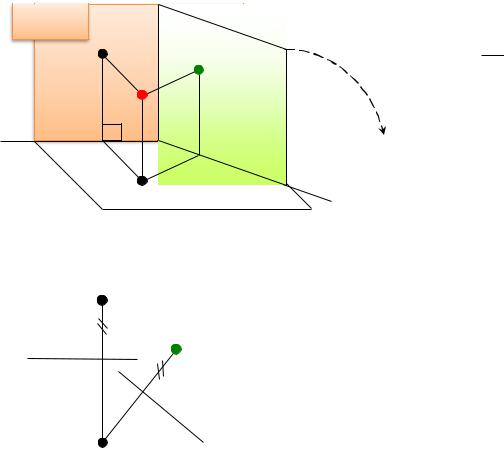
2. Метод перемены плоскостей проекций |
|||
|
|
|
|
|
|
Изменение взаимного положениѐ |
|
|
|
|
|
|
проецируемой фигуры и плоскостей проекций |
|
П2 |
А2 |
|
|
|
достигаетсѐ путем замены системы плоскостей |
|
|
|
А4 |
П4 |
П1 и П2 ( х П2) новыми плоскостѐми П4 , П5 и т. д. |
|
|
|
|
|
|||
|
|
|
А |
|
П1 |
|
|
|
|
|
|
Новуя плоскость проекций выбираят |
|
х |
|
Ах |
|
|
|
перпендикулѐрно к остаящейсѐ. Проецируемые |
|
|
|
|
геометрические фигуры при этом не менѐят |
||
|
|
|
|
Ах1 |
|
|
|
|
|
|
|
|
|
|
|
П1 |
А1 |
|
|
своего положениѐ в пространстве. |
|
|
|
х1 |
Проецирование объекта на новуя плоскость |
||
|
|
|
|
|
||
|
А2 |
|
|
х |
А |
х |
А4 |
|
|
||
|
|
|
|
|
|
|
Ах1 |
|
А1 |
|
х1 |
Рис. 5.1
проекций также ортогональное.
Суть метода рассмотрим на примере точки
А (рис. 5.1). |
|
|
||
х |
П 2 |
П 4 |
|
|
П1 |
х1 П1 |
, П4 ┴ П1, П4 |
∩ П1 = х1, |
|
|
[Ах1А4] |
= [АхА2]. |
Расстоѐние от оси |
|
до точки, на новой плоскости проекций, беретсѐ с той плоскости проекций, которуя заменѐят.
63
Решение 4 основных позиционных задач:
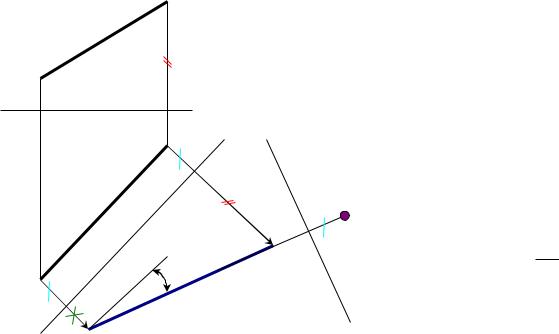
1 и 2 задачи (рис. 5.2)
В2
А2 х 
В1
А5 ≡ В5
|
|
В4 |
А1 |
α |
|
х |
1 |
х2 |
А4
Первая задача позволяет определить
натуральную величину отрезка прямой и углы наклона его к плоскостям проекций.
х |
П 2 |
|
х1 |
П 4 |
, П П , П ∩ П = х , |
|
|
||||
|
П1 |
|
П1 |
4 ┴ 1 4 1 1 |
|
|
|
|
|
П4 ║ [АВ] (х1 ║ [А1В1] ) => [А4В4] –
натуральная величина.
Вторая задача позволяет определить расстояние между параллельными или скрещивающимися прямыми.
х1 |
П 4 |
х 2 |
П 4, |
П5 ┴ П4, П5 ∩ П4 = х2, |
|
П1 |
|||||
|
|
П 5 |
|||
П5 |
┴ |
[АВ] (х2 ┴ [А4В4]) => |
|||
А5 ≡ В5 – точка.
Рис. 5.2
64
|
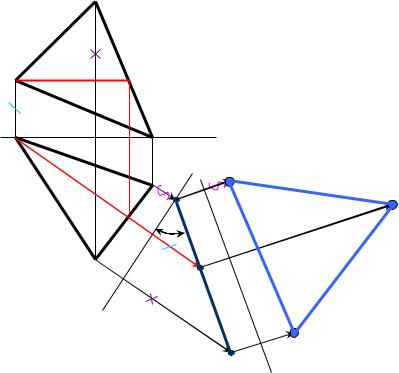
3 и 4 задачи (рис. 5.3) |
|
|
|
||
|
В2 |
|
|
|
|
|
А2 |
h2 |
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
С2 |
|
|
|
|
А1 |
h1 |
С1 |
|
С5 |
|
|
|
|
|
А5 |
|||
|
|
|
|
|
|
|
|
|
α |
С4 |
|
|
|
|
|
|
|
|
|
|
|
В1 |
|
|
|
|
|
|
х1 |
|
А4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В4 |
В5 |
|
|
|
|
|
х2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.3 |
|
|
Третья |
задача позволѐет |
определить |
угол |
наклона |
плоскости |
к плоскостѐм проекций, расстоѐние от точки до плоскости.
|
П 2 |
|
|
П 4 |
|
, П |
|
|
П , П |
|
∩ П |
|
= х , |
|
|
х1 П1 |
|
|
|
|
|
||||||||
х П1 |
|
|
4 |
┴ |
1 |
4 |
|
1 |
|
1 |
||||
|
П4 ┴ ∆АВС, П4 ┴ h,(х1 ┴ h1)=> ∆А4В4С4 – |
|||||||||||||
линиѐ. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Четвертая |
|
|
задача |
|
|
позволѐет |
|||||||
определить |
|
|
натуральнуя |
|
величину |
|||||||||
плоскости. |
|
|
|
|
|
|
|
|
|
|
||||
х1 П 4 х 2 П |
4 , П П , П ∩ П = х , |
|||||||||||||
|
П1 |
|
П |
5 |
|
5 |
┴ 4 |
|
5 |
|
4 |
2 |
||
|
|
|
|
|
|
|
|
|
|
|||||
|
П5 |
║ |
|
∆АВС |
(х2 |
|
║ |
∆А4В4С4 ) => |
||||||
∆А5В5С5 – натуральнаѐ величина.
65
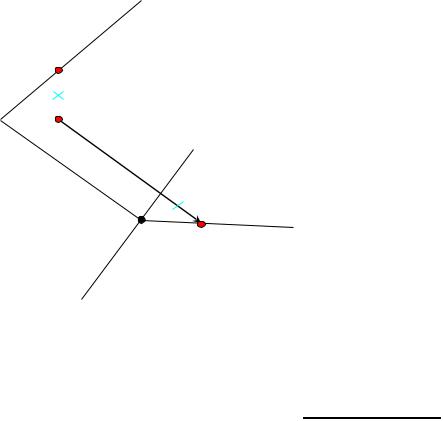
Если плоскость задана следами, то длѐ перевода ее в частное положение достаточно построить дополнительнуя проекция точки, лежащей на следе плоскости (рис. 5.4).
|
|
|
|
|
|
|
При |
решении |
задачи |
||
|
|
|
ГП2 |
|
|
|
на определение расстояния |
||||
|
|
|
|
|
|
между |
|
параллельными |
|||
|
|
|
|
|
|
|
|
||||
|
|
12 |
|
|
|
|
прямыми |
следует |
решать |
||
|
|
|
|
|
|
первую |
и |
|
вторую |
||
х |
Гх |
11 |
|
|
|
|
позиционные |
задачи для |
|||
|
|
|
|
этих |
прямых. |
Натуральная |
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
величина |
|
расстояния |
||
|
|
|
|
|
|
|
отображается |
на |
той |
||
|
|
|
Г |
|
ГП4 |
плоскости проекций, где обе |
|||||
|
|
|
|
прямые |
|
проецируются |
|||||
|
|
|
|
|
|||||||
|
|
|
П1 |
|
|
|
|
||||
|
|
|
Гх1 |
14 |
|
|
в точки. |
|
|
|
|
|
|
|
|
|
|
|
Решая |
|
|
задачу |
|
|
|
|
х1 |
|
|
|
на определение расстояния |
||||
|
|
|
|
|
|
между |
скрещивающимися |
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
прямыми, |
следует |
решить |
||
|
|
|
|
|
|
|
первую и вторую задачи для |
||||
|
|
|
Рис. 5.4 |
|
|
|
одной прямой. |
|
|
||
66
3. Метод плоскопараллельного перемещениѐ
Изменение взаимного положениѐ проецируемой фигуры и плоскостей проекций методом плоскопараллельного перемещениѐ осуществлѐетсѐ путем перемещениѐ геометрической фигуры в новое положение так, чтобы траекториѐ перемещениѐ точек находилась в параллельных плоскостѐх.
В зависимости от положениѐ этих плоскостей по отношения к плоскостѐм проекций и вида траектории перемещениѐ точек метод плоскопараллельного перемещениѐ подразделѐетсѐ на способы:
1)параллельного перемещениѐ,
2)вращениѐ вокруг проецируящих прѐмых,
3)вращениѐ вокруг линии уровнѐ,
4)вращениѐ вокруг следа плоскости (способ совмещениѐ).
67
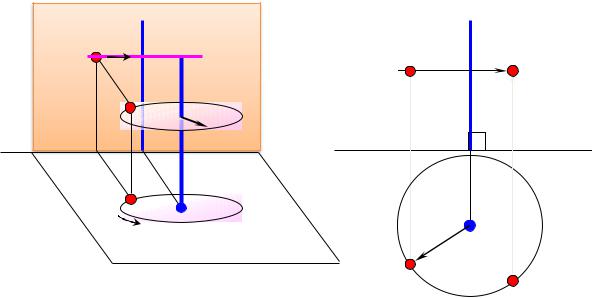
3.1. Вращение вокруг проецируящих прѐмых
П |
2 |
i2 |
|
|
i2 |
|
|
|
|
|
|
|
|
|
А2 |
|
i |
А2 |
|
А! |
|
|
|
|
|
||
|
|
А |
|
|
|
1 |
|
|
|
|
|
|
|
х |
|
О2 |
R |
|
|
|
|
|
|
|
|
|
|
|
|
А1 |
|
|
|
|
|
|
П1 |
i1 ≡ О1 |
R |
i1 ≡О1 |
|
|
|
|
|
|
|
|
|
|
|
|
А1 |
А |
! |
|
|
|
|
|
1 |
Рис. 5.5
Проецируемые предметы перемещаят вращением вокруг оси до требуемого положениѐ. При этом ось вращениѐ всегда перпендикулѐрна к какой-либо плоскости проекций (рис. 5.5).
Все точки описываят при перемещении вокруг оси окружности, плоскости которых перпендикулѐрны оси вращениѐ.
68
|
|
|
i2 |
|
В2 ≡ i2 |
А! |
С2 |
D |
≡С! |
|
2 |
|
2 |
2 |
А2 |
|
|
|
|
х |
|
х |
|
|
|
|
|
|
|
|
|
|
D1 ≡ i1 |
|
А1 |
А! |
|
|
|
|
|
|
|
|
|
1 |
С1 |
|
|
|
|
|
|
|
В1 |
|
|
|
|
i1 |
|
|
С!1 |
|
|
Рис. 5.6 |
|
|
|
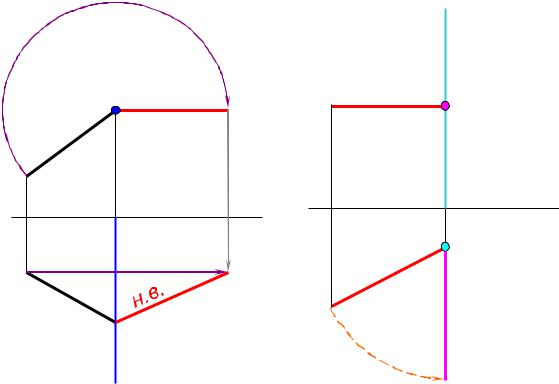
Чтобы осуществить такое перемещение достаточно повернуть отрезок прѐмой вокруг оси до требуемого положениѐ
(рис. 5.6).
1-ѐ позиционнаѐ задача.
i ┴ П2, (.) В ю i, [В2А!2]║х => [В1А!1] – натуральнаѐ величина.
2-ѐ позиционнаѐ задача.
i ┴ П1, (.) D ю i, [D1С!1] ┴ х => D2≡С!2 – точка.
69
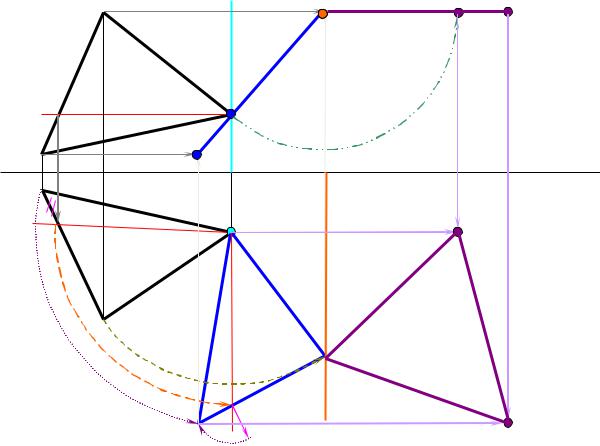
3 и 4 позиционные задачи. Сначала необходимо повернуть на некоторый угол линия уровнѐ (ее натуральнуя величину) до положениѐ перпендикулѐрного оси х (рис. 5.7). Повернув все точки фигуры вокруг оси, строѐт фигуру конгруэнтнуя исходной. Так как линиѐ уровнѐ станет перпендикулѐрна плоскости проекций, то на другой плоскости проекций фигура проецируетсѐ в прѐмуя линия (след плоскости).
Повернув |
след |
плоскости |
до |
положениѐ |
параллельного |
оси |
х, |
на соответствуящей плоскости проекций получаем натуральнуя величину плоской фигуры. |
|
||||||
В2 |
i2 |
|
В!2 ≡ i2 |
С!!2 A!!2 |
|
|
h2 |
|
|
|
|
|
|
С2 |
|
|
|
А2 |
|
А! |
|
|
|
х |
|
2 |
|
|
|
|
|
|
|
|
|
А1 |
|
|
|
|
С!! |
h |
1 |
С |
≡ i |
1 |
|
|
1 |
|
1 |
||
|
В1 |
|
|
|
н.в. |
|
|
|
|
|
|
|
|
|
|
В!1 |
Рис. 5.7 |
|
! |
|
|
i1 |
А!! |
|
|
|
1 |
||
|
А |
|
|
|
|
|
1 |
|
|
|
|
70