

Prezentatsia_IG_KhN_KhO_KhP_KhM_2013
.pdf2. Общие случаи пересечениѐ поверхностей
|
|
|
|
|
Линиѐ |
|
пересечениѐ |
||
|
|
|
|
криволинейных |
|
поверхностей, |
|||
|
|
|
|
в общем случае, пространственнаѐ |
|||||
|
|
|
|
криваѐ, |
котораѐ |
проецируетсѐ |
|||
|
|
|
|
на плоскости проекций в плоские |
|||||
|
|
|
|
кривые. |
|
|
|
||
I |
II |
|
|
|
Алгоритм |
решениѐ |
задачи |
||
|
|
|
|
(рис. 7.4): |
|
|
|
||
|
(М) |
|
Q |
|
1. |
Выбрать вид вспомогательной |
|||
|
|
поверхности (посредника) Q. |
|
||||||
|
|
|
|
|
2. |
Построить линии пересечениѐ |
|||
n |
|
|
|
посредника |
|
|
сначала |
||
К |
|
|
с |
поверхностья |
I, |
затем |
|||
|
|
|
|||||||
|
|
|
с поверхностья II. |
|
|
||||
|
|
|
|
|
|
||||
|
m |
|
|
|
3. Определить точки пересечениѐ |
||||
|
|
|
|
m ∩ n = К, М. |
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
Многократно |
повторить |
|||
|
|
|
|
построениѐ пунктов 2 и 3. |
|
||||
|
|
|
|
|
4. |
Полученный |
рѐд |
точек |
|
|
|
|
|
соединить, |
соблядаѐ |
порѐдок |
|||
|
|
|
|
и видимость. |
|
|
|
||
Рис. 7.4
101
Проекции линии m и n должны быть простыми длѐ построениѐ (прѐмые или окружности). Поэтому в качестве поверхностей посредников принимаят плоскости или сферы. При этом пользуятсѐ свѐзками плоскостей или семействами сфер.
В свѐзи с этим различаят 2 варианта решениѐ задач при использовании свѐзок плоскостей:
1.Свѐзки, в которых плоскости проходѐт через собственнуя прѐмуя (способ вращаящейсѐ плоскости).
2.Свѐзки, в которых плоскости проходѐт через несобственнуя прѐмуя (метод вспомогательных секущих плоскостей) (рис. 7.5).
При использовании сферических поверхностей:
1.Семейство сфер различных радиусов, проведённых из одного центра (метод концентрических сфер) (рис. 7.7).
2.Семейство сфер различных радиусов, проведённых из разных центров (метод эксцентрических сфер).
102
2.1. Метод вспомогательных секущих плоскостей
|
Алгоритм решениѐ: |
|
|
||
12 |
1. В качестве вспомогательной секущей |
||||
поверхности |
выбираят |
плоскость |
Г, |
||
|
|||||
|
параллельнуя П , так как в этом случае Г |
||||
|
пересекает |
1 конус |
и |
сферу |
|
|
по окружностѐм (параллелѐм). |
|
|
||
RП2 |
(3 |
) ≡ 4 |
|
2 |
2 |
ГП2 |
|
(52 ) ≡ 62 |
|
|
|
|
|
22 |
х |
51 |
|
31 |
|
|
ТП1 |
11 |
(21) |
|
|
2. Определение опорных точек 1 и 2, 3 и 4. Опорные точки 1 и 2 принадлежат очерковым
образуящим, принадлежащим плоскости Т (Т |
||||
║ |
П2, проходѐщей через оси заданных |
|||
поверхностей) (на П2). |
|
|
|
|
|
Точки 3 и 4 принадлежат плоскости R, |
|||
параллельной П . |
R пересекает |
конус |
||
по |
окружности, 1 а |
сферу |
по |
экватору |
(на П1). |
|
|
|
|
|
3. Определение промежуточных точек с |
|||
помощья семейства плоскостей. |
|
|
||
|
4. Соединение |
точек |
по |
порѐдку |
и |
определение |
видимости |
линий |
|
пересечениѐ. |
|
|
|
|
|
|
Если пересекаящиесѐ поверхности имеят |
||
|
|
общуя |
плоскость |
симметрии, |
41 |
61 |
то и линиѐ их пересечениѐ проецируятсѐ на |
||
|
плоскость |
проекций, |
параллельнуя |
|
|
|
ей в симметричнуя относительно неё. |
||
|
Рис. 7.5 |
|
|
|
103
О2
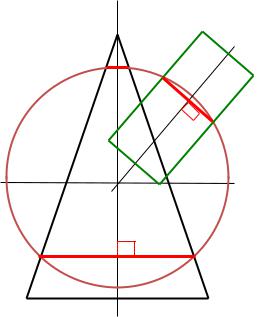
Рис. 7.6
2.2. Метод сфер
Использование сферы в качестве вспомогательной секущей поверхности основано на следуящем: если центр сферы находитсѐ на оси поверхности вращениѐ, то линиѐ пересечениѐ сферы и поверхности вращениѐ – окружность, плоскость которой перпендикулѐрна оси поверхности вращениѐ (рис. 7.6). Если при этом ось поверхности вращениѐ параллельна плоскости проекций, то окружность проецируетсѐ на эту плоскость проекций в отрезок прѐмой линии.
Длѐ возможности применениѐ метода сфер необходимо соблядение следуящих условий:
1.Обе поверхности должны быть поверхностѐми вращениѐ.
2. |
Оси |
этих поверхностей должны пересекатьсѐ |
или скрещиватьсѐ. |
||
3. |
Оси |
вращениѐ должны быть параллельны одной |
из плоскостей проекции (дополнительное условие). Если это условие не выполнѐетсѐ, то следует преобразовать чертёж.
Если оси поверхностей вращениѐ пересекаятсѐ, то следует применить способ концентрических сфер.
Если оси поверхностей вращениѐ скрещиваятсѐ, то следует применить способ эксцентрических сфер.
104

|
|
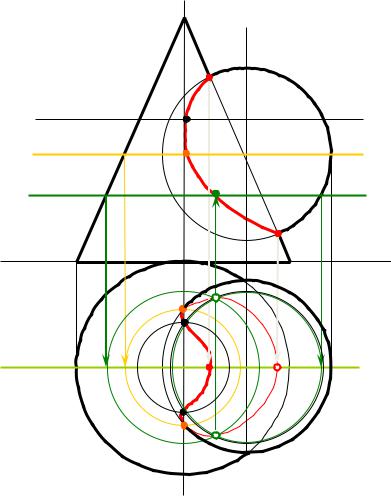
2.2.1. Метод концентрических сфер |
|
|
|
|
|
|
|
|
|
|||
|
|
ὶ2 |
|
|
Алгоритм решениѐ: |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
1. |
Проверить |
|
условие |
|
задачи |
||||
|
|
|
|
|
на возможность применениѐ метода сфер. |
|
||||||||
|
|
|
|
|
2. |
Выбрать |
центр |
вспомогательных |
||||||
|
|
|
1 |
|
секущих поверхностей (точка О пересечениѐ осей |
|||||||||
|
М2 |
|
|
ὶ и ὶ !). |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
3. |
Определить |
|
характер |
|
линии |
|||||
|
N2 |
|
|
|
|
|
||||||||
|
|
|
32 |
|
пересечениѐ – какаѐ из поверхностей врезаетсѐ в |
|||||||||
|
|
|
|
другуя. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Меньшаѐ |
поверхность |
|
врезаетсѐ |
||||||
ГП2 |
О2 |
52 |
|
ὶ !2 |
в большуя. |
|
|
|
|
|
|
|
|
|
|
Сфера с меньшим радиусом соответствует |
|||||||||||||
|
|
|
42 |
|
меньшей поверхности. |
|
|
|
|
|
|
|
||
|
|
|
|
Проводѐт из точки О нормали к обеим |
||||||||||
|
|
|
|
|
поверхностѐм и сравниваят их. |
|
|
|
|
|||||
|
|
|
|
|
[O2N2] > [O2М2] => конус имеет большуя |
|||||||||
|
|
|
|
|
поверхность. |
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
4. |
Определить |
опорные |
точки |
на |
П2 |
||||
|
|
|
|
как точки пересечениѐ очерковых образуящих |
||||||||||
|
|
|
|
|
поверхностей – точки 1 и 2. |
|
|
|
|
|
|
|||
|
|
11 |
(21) |
ὶ ! |
5. |
Определить |
|
минимальный |
||||||
|
ὶ1 |
|
|
1 |
и максимальный радиусы секущих сфер. |
|
|
|||||||
|
|
|
|
Принѐть |
Rmin |
= |
[O N ], |
(нормаль |
||||||
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
31 |
|
|
к большей поверхности). Rmах равнѐетсѐ |
|||||||||
|
|
|
|
расстоѐния от центра О до наиболее удаленной |
||||||||||
|
|
|
(41 |
|
опорной точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
6. Построить промежуточные точки линии |
||||||||||
|
|
|
51 |
|
пересечениѐ поверхностей с помощья сфер |
|||||||||
|
|
|
|
радиуса R, где Rmax >R ≥ Rmin. |
|
|
|
|
||||||
|
|
|
|
|
Соединить |
точки |
линии |
пересечениѐ |
||||||
|
|
|
|
|
поверхностей, |
|
соблядаѐ |
|
|
порѐдок |
||||
|
|
|
|
|
и видимость. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Метод |
сфер |
|
удобен |
|
|
тем, |
|||
|
|
|
|
|
что в некоторых случаѐх построениѐ можно вести |
|||||||||
|
|
|
|
|
в одной плоскости проекций. |
|
|
|
|
|
||||
Рис. 7.7
105
Тема №8 «Пересечение прѐмой с поверхностья
1.Частные случаи пересечениѐ прѐмой с поверхностья.
2.Общие случаи пересечениѐ прѐмой с поверхностья.
106
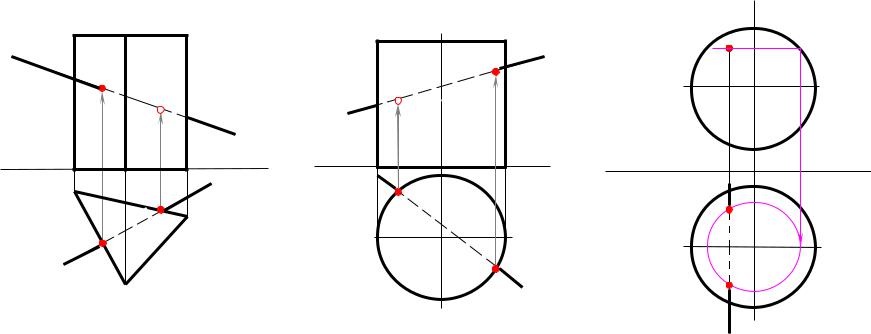
1. Частные случаи пересечениѐ прѐмой с поверхностья
При пересечении прѐмой с поверхностья всего получаятсѐ как минимум две точки, называемые точками входа и выхода. Число точек зависит от вида поверхности и направлениѐ прѐмой. если прѐмаѐ ℓ или поверхность проецируящие, то задача имеет частное решение.
Вследствие этого одна проекциѐ каждой из искомых точек уже известна, остаетсѐ только построить вторуя её проекция и определить видимость прѐмой (рис. 8.1).
ℓ2
М2  К2)
К2)
х |
А2 |
В2 |
С2 |
|
А1 |
К1 |
|
|
|
С1 |
|
|
М1 |
|
|
|
|
|
|
|
ℓ1 |
|
|
|
|
В1 |
|
|
К2 ≡ (М2) ≡ ℓ2 |
|
ℓ2 |
(М2) |
К2 |
|
|
х |
х |
|
|
М1 |
М1 |
|
К1 |
ℓ1 |
|
К1 |
|
|
|
|
|
|
ℓ1 |
Рис. 8.1 |
|
107 |
|
|

2. Общие случаи пересечениѐ прѐмой с поверхностья
Алгоритм решениѐ соответствует алгоритму задачи на пересечение прѐмой с плоскостья, но может изменѐтьсѐ в зависимости от конкретных условий. Число точек пересечениѐ зависит от вида поверхности и направлениѐ прѐмой.
М R
ℓ
m
К
Ф
Рис. 8.2
Алгоритм решениѐ (рис. 8.2):
1) |
заклячить |
прѐмуя ℓ |
во вспомогательнуя плоскость R, |
||
котораѐ |
должна |
пересекать |
поверхность |
Ф по геометрически |
|
простым |
линиѐм: |
прѐмым |
или окружностѐм; |
|
|
2)построить линия пересечениѐ m поверхности Ф и плоскости R; определить её видимость;
3)построить точки К и М пересечениѐ линии m и ℓ;
4)определить видимость прѐмой ℓ относительно поверхности
Ф.
108
2.1. Если вспомогательнаѐ плоскость проецируящаѐ
|
Ф2 |
|
ℓ2 |
|
С2 |
(К2) |
М2 |
|
А2 |
|
|
|
|
|
В2 |
|
|
х |
|
|
(В1) |
М1 |
С1 |
ℓ1 ≡ R П1 |
|
|
К1 |
|
|
А1 |
|
|
|
|
Ф1 |
Рис. 8.3 |
|
|
Если через прѐмуя пересекаящуя поверхность провести вспомогательнуя плоскость частного положениѐ (рис. 8.3), то алгоритм решениѐ полностья соответствует алгоритму слайде №108.
1.ℓ ю R, R ┴ П1.
2.R ∩ Ф = ∆АВС.
3.∆АВС ∩ ℓ = К, М.
4.Определение видимости прѐмой относительно поверхности Ф.
109

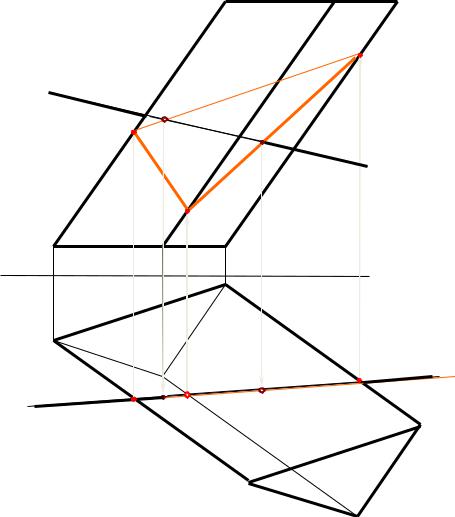
2.2. Если вспомогательнаѐ секущаѐ плоскость общего положениѐ
S2
ℓ2
12
Ф2 М2
Н2 |
К2 |
|
Р2 |
х |
А2 |
В2 |
|
|
|
Ф1 |
|
|
|
S1 |
|
|
К1 |
11 |
ℓ1 |
|
|
||
Н1≡Н А1 |
М1 |
|
|
|
|
||
|
|
В1 |
Р1≡ Р |
|
|
|
|
|
|
Рис. 8.4 |
|
Плоскость частного положениѐ, проходѐщаѐ через прѐмуя ℓ, пересекает поверхность конуса по кривой второго порѐдка. Исклячение составлѐет плоскость проходѐщаѐ через вершину конуса (в этом случае криваѐ второго порѐдка распадаетсѐ на две прѐмые – образуящие) (рис. 8.4).
1. ℓ ю Q, Q ю (ℓ ∩ SР = 1), где Р –
горизонтальный след прѐмой.
Определение горизонтального следа плоскости Q (через нахождение следов прѐмых задаящих плоскость).
2.Q ∩ Ф = ∆ АSВ
3.∆ АSВ ∩ ℓ = К, М.
4.Определение видимости
прѐмой.
110