

1.4.3. Метод случайного поиска
В данном методе возможные направления определяются с помощью генератора псевдослучайных чисел с равномерным распределением в диапазоне -1,…,1.
Д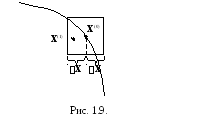 ля
этого в исходной точке Х(0)
рассматривается куб с гранью 2x
(рис.1.9) и считается значение функции
F0.
Случайным образом выбирается точка в
кубе
ля
этого в исходной точке Х(0)
рассматривается куб с гранью 2x
(рис.1.9) и считается значение функции
F0.
Случайным образом выбирается точка в
кубе
![]() ,
гдеi
– псевдослучайное число (-1
i
1). В точке Х(1)
считается значение функции F1.
,
гдеi
– псевдослучайное число (-1
i
1). В точке Х(1)
считается значение функции F1.
Если F1 < F0, то исходная точка Х(0) переносится в точку Х(1) и процедура повторяется. Если F1 > F0, то выбранная точка Х(1) считается неудачной, и вместо нее отыскивается новая точка. Вдали от минимума вероятность попадания в область возможных направлений близка к 50%. По мере приближения к решению величина x уменьшается.
Достоинства метода: простота алгоритма, не требующего вычисления производных. Недостаток - большое число итераций.
1.4.4. Метод деформированного многогранника
Метод основан на
вычислении целевой функции в (n+1)
точках Х1,
Х2,
Х3
(рис.1.10).С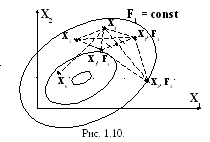 реди
них ищется точка сFMAX
(в нашем случае Х2
c
F2).
Затем найденная точка проектируется
через центр тяжести остальных точек
(Х1
и Х3)
с коэффициентом
(0
1) и получается новая точка (Х4).
В полученной точке считается F
(здесь F4).
С полученными тремя точками (Х1,
Х3,
Х4)
проводим аналогичные операции –
проводится дальнейшая деформация.
реди
них ищется точка сFMAX
(в нашем случае Х2
c
F2).
Затем найденная точка проектируется
через центр тяжести остальных точек
(Х1
и Х3)
с коэффициентом
(0
1) и получается новая точка (Х4).
В полученной точке считается F
(здесь F4).
С полученными тремя точками (Х1,
Х3,
Х4)
проводим аналогичные операции –
проводится дальнейшая деформация.
Метод деформированного многогранника и случайного поиска относят к методам нулевого порядка, поскольку они не требуют вычисления производных и строятся только на вычислении значений целевой функции.
1.5. Оптимизация с учетом ограничений в форме равенств
Рассмотрим общую задачу нелинейного программирования
F(X) min при G(X) = 0.
Здесь X = {x1,…,xn} – вектор неизвестных,
G(X) = {g1(X),…,gm(X)}- вектор-функция ограничений в форме равенств.
Соотношение m и n определяет возможности решения. Если m > n, то система ограничений несовместна и решения нет. Если m = n, то может существовать единственное решение. При m < n система ограничений имеет множество решений, среди которых и надо найти оптимальное.
Рассмотрим основные методы оптимизации при ограничениях – равенствах.
1.5.1. Метод прямой оптимизации
Данный метод
используется, когда G(X)
представлена простыми функциями,
например линейными. В этом случае m
неизвестных из n
можно аналитически выразить через
остальные k
= n
– m
и подставить эти выражения в F(X).
Тогда получим новую функцию![]() ,
,
условие минимума которой будет иметь k уравнений:
 .
.
Решение этих уравнений позволяет найти все k составляющих вектора . Остальные переменные находятся подстановкой в ранее найденные выражения.
Рассмотрим пример:
F(X) = 5 + x12 + x22 min;
g(X) = x1 + x2 – 2 = 0;
= x2
x1 = 2 – x2
f() = f(x2) = 5 + (2 – x2)2 + x22 min,
 ,
–2(2 – x2)
+ 2x2=0,
x2
= 1;
,
–2(2 – x2)
+ 2x2=0,
x2
= 1;
x1 = 2 – 1 = 1.
Метод прямой оптимизации прост, но может быть использован для решения только аналитически заданных функций сравнительно простого вида.
1.5.2. Метод приведенного градиента
Здесь исходный вектор неизвестных делится на два блока
X ={, Y}, где – свободные, в количестве k, а Y – зависимые, в количестве m.
При этом зависимость Y() безусловно существует, но в неявной форме, то есть не определяется аналитическим выражением.
Выражение для градиента целевой функции можно записать по правилу вычисления производной с учетом неявных функций.
 ,
,
где в скобках указаны производные, взятые с учетом только явной зависимости.
Производную
![]() можно определить аналогично из условияG(X)=0.
можно определить аналогично из условияG(X)=0.
Поскольку
G(X)
= G(,Y)
= 0, то  .
.
Откуда 
и  ,
,
где
![]() – приведенный градиент.
– приведенный градиент.
Приведенный градиент может использоваться в процедуре градиентного метода.
![]()
Изобразим на графике процесс поиска решения методом приведенного градиента в пространстве 2-х переменных (рис.1.11).
З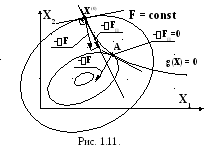 десь
десь![]() – это проекция антиградиента на линию
ограничений, в общем случае – на
плоскость.
– это проекция антиградиента на линию
ограничений, в общем случае – на
плоскость.
Решение лежит в точке A, где линия ограничения касается ближайшей линии F = const.
Сложности метода
связаны с определением проекции, для
чего требуется обращение матрицы
![]() ,
имеющей размерностьmm.
,
имеющей размерностьmm.