

2.3.3. Устройства преобразования информации.
1. АЦП бывают различными видами преобразования:
– развертывающее,
– с поразрядным уравновешиванием.
Развертывающее преобразование:

При UBX > UП запускается счетчик импульсов.
Недостаток данного вида преобразования: время преобразования зависит от частоты сигнала.
Поразрядное уравновешивание:
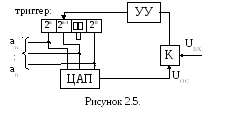
Данное преобразование работает следующим образом:
С помощью компаратора K через устройство управления УУ на триггерах поочередно, начиная со старшего разряда 2n выставляется 1. Если при этом UOC > UBX, то 1 сбрасывается. В противном случае – сохраняется. Например:
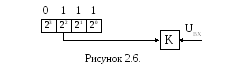
1 23 = 8, UOC = 8 > UBX = 7.
1 22 = 4, UOC = 4 > UBX = 7.
UOC = 22 1 + 21 = 6 < UBX = 7.
UOC = UBX код 0111.
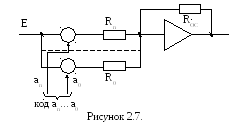
2. ЦАП:
![]() ,
,
 .
.
Схема на операционном усилителе.

2.3.4. Средства связи в асу и телемеханика.
Вся информация в АСУ передается в виде электрических сигналов в аналоговой или цифровой форме (может использоваться постоянный или переменный ток). В цифровой форме передача более надежна и помехоустойчива, так как уровни 0 и 1 надежно различаются.
В качестве линий
связи могут использоваться телеграф,
телефон, УКВ (радио), ЛЭП (со специальной
ВЧ обработкой), оптоволоконные линии,
спутниковая связь. Линии характеризуются
скоростью передачи
![]() .
Самые медленные линии – телеграфные,
самые быстрые – оптоволоконные.
.
Самые медленные линии – телеграфные,
самые быстрые – оптоволоконные.
По одной линии можно организовать передачу по нескольким каналам. Для этого используются разделения:
– временное: шаговые искатели

Данное разделение имеет предельно простой принцип.
– частотное: каждый канала настроен на свою несущую частоту fi:
![]()
Необходимыми элементами этого разделения является генераторы несущих частот, устройства модуляции. На приемном конце обязательны фильтры и демодуляторы.
Основными источниками информации являются устройства телемеханики. Они делятся на:
– КП (устройства контролируемого пункта);
– ПУ (устройства пункта управления);
– известительная КП ПУ:
а) телесигнализация (ТС) – информация о положении аппарата с двумя устойчивыми состояниями (выключатель, разъединитель, дверь и т.п.);
б) телеизмерения (ТИ) – информация о параметрах технологического процесса:
– текущие ТИ (ТИТ),
– интегральные ТИ (ТИИ) – счетчики;
в) аварийно-предупредительная сигнализация (АПС);
– распорядительная ПУ КП:
а) телерегулирование (ТР), т.е. определяет величину технологического параметра и используется часто как задатчик,
б) телеуправление (ТУ) – управление объектами с двумя устойчивыми состояниями.
Обмен информацией может проходить циклически, с определенным периодом опроса, или спорадически, когда передается только измерительная информация.
По этой системе обычно работает телесигнализация. Но здесь требуется подтверждение принятого сигнала (квитирование). Работа линии связи между ПУ и КП может строиться, как симплексная когда передача идет в одном направлении (достаточно одного провода). Дуплексный режим – передача в двух направлениях (необходимо как минимум два провода). Полудуплексный режим – режим, при котором в один период данные передаются от КП к ПУ (КП ПУ), а в другой – от ПУ к КП (КП ПУ). Используется много устройств телемеханики ото простейших, предназначенных только для ТС, до самых современных, в которых используются ЭВМ.
Пример устройства с временным разделением – ТМ-120: обеспечивает контроль и работу ЗОКП: 48ТС, 16ТИ, 16ТУ. Работает со скоростью 100 бод. Используется на подстанциях и в РЭС.
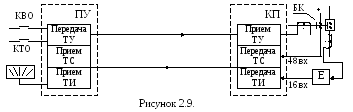
КВО – кнопка выбора объекта;
КТО – кнопка типа операции (вкл., откл.).
ТМ – 512 (с кодоимпульсным разделением каналов).
Здесь посылается в линию связи сигналы, содержащие информацию о начале посылки 01111111, затем адресный байт, определяющий номер КП, тип информации, номер канала и информационная часть (телеизмерение занимает 1 байт и представляется числами от 0 до 255 – число квантов. В ТС 1 байт соответствует восьми объектам (например, 8 выключателей). Устройство работает со скоростью 600 бод. Самые современные УТМ строятся с использованием ЭВМ или МП. Самое первое устройство – RPT, отечественное – ГРАНИТ (сегодня широко используется). На одном ПУ подключается до 16 КП. На каждом КП:
ТИИ – 32 (интегральные ТИ);
ТИТ – 96 (текущие ТИ);
ТС – 192;
ТУ – 48.
В ГРАНИТЕ используется восьми разрядный АЦП, поэтому не обеспечивает сегодня необходимой точности. Осуществляется переход к шестнадцати разрядным АЦП, что существенно повысит точность. В последние годы УТМ разрабатываются на оборонных предприятиях в рамках конверсии. Пример: КОМПАС ТМ. Отличается малыми габаритами.
Принципиальная схема:
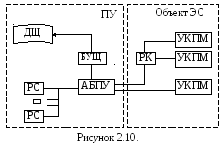
УКПМ – устройства контролируемого пункта малогабаритные:
ТС – 64,
ТИТ – 32,
ТУ – 32,
ТИИ – 30;
УКПМ имеет БКС – блок клемных соединений, куда подключаются все внешние приборы и блок реле повторителя БРП;
АБПУ – аппаратный блок ПУ;
РК – расширитель каналов;
РС – рабочие станции;
БУЩ – блок управления щитом;
Аналогичное УТМ разработано в Екатеринбурге в НПО “??????????????????” и называется УКТУС.
Разрабатываются различные устройства для распределения сетей.