

1.3. Особенности задачи нелинейного программирования
По сравнению с линейными задачи нелинейного программирования имеют ряд особенностей:
Допустимая область может быть не выпуклой (рис.1.2);

Рис. 1.2.
Решение может лежать как внутри допустимой области, так и на границе;
Целевая функция может иметь несколько экстремумов, один из них является глобальным, остальные – локальными (рис. 1.3)
Рис. 1.3.
Все это осложняет решение, поэтому, в отличие от линейного программирования, здесь существует множество методов решения подобных задач.
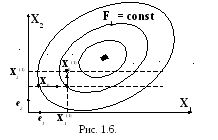
Ниже будут рассмотрены основные методы нелинейного программирования. Для иллюстрации их будет использована F(Х) при n=2 и представляемая на графике в виде линий F = const (рис.1.4).
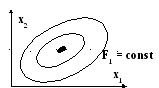
Рис. 1.4.
1.4. Методы безусловной оптимизации
Пусть задана целевая функция F(Х)min без ограничений, где Х={x1,…,xn}.
Если F(x) задана аналитически, то условие экстремума
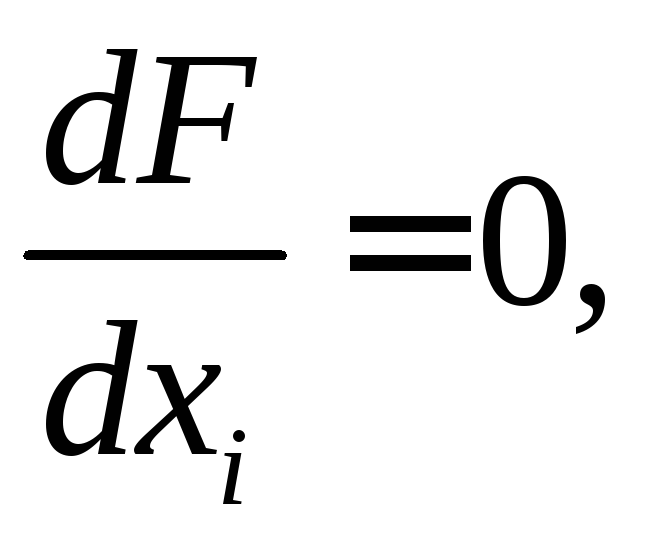 гдеi=
1,…,n.
гдеi=
1,…,n.
Как известно,
условие минимума: 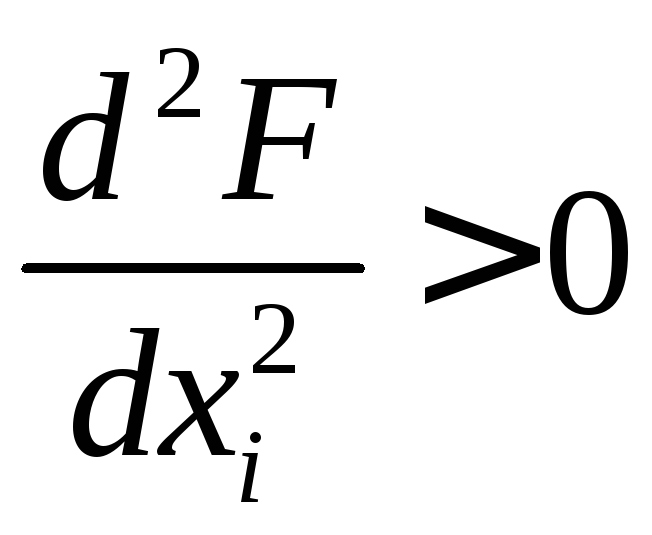
Далее будем рассматривать численные методы решения, которые удобны для реализации на ЭВМ. На сегодняшний день большинство таких методов относятся к методам возможных направлений (рис.1.5).
Р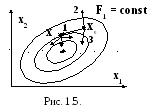 асчет
начинается с исходного приближенияx0.
В точке x0
рассматривается несколько направлений
асчет
начинается с исходного приближенияx0.
В точке x0
рассматривается несколько направлений
![]() .
Направления, ведущие к снижению F
(здесь 1 и 3) называют возможными
направлениями (ВН).
.
Направления, ведущие к снижению F
(здесь 1 и 3) называют возможными
направлениями (ВН).
По любому из этих
возможных направлений осуществляется
переход в следующую точку:
![]() ,
гдеt
– шаг.
,
гдеt
– шаг.
Получаем общее
уравнение:
![]() ,
,
где k – номер итерации (шага).
Величина шага t определяет сходимость процесса:
если t0, то сходимость медленная, но надежная;
если t – большой, то сходимость быстрая, но процесс может расходиться.
Наилучшая сходимость
обеспечивается выбором tОПТ
по критерию F(Х)min
на выбранном направлении
![]() .
Оптимальный шаг можно выбрать, еслиF(x)
представить по возможности как
.
Оптимальный шаг можно выбрать, еслиF(x)
представить по возможности как
![]() и по условию минимума
и по условию минимума
 найти оптимальный
шаг
найти оптимальный
шаг
![]() .
.
Чаще f(t) аппроксимируют кривой второго порядка:
![]()
Для определения параметров a,b и c считают f в трех точках:
- при t = 0, когда x = x0 (F(x0) = F0);
- при t
= 1, ![]() (F(x1)
= F1);
(F(x1)
= F1);
- при t
= 2, ![]() (F(x2)
= F2).
(F(x2)
= F2).
После этого составляют систему уравнений,
из решения которой находят a,b и c.
Из условия минимума функции
![]()
определяют оптимальный шаг
![]() ,
,
Методы, в которых определяется tОПТ, называются методами скорейшего поиска. Эти методы широко используются при решении задач.
В зависимости от выбора возможных направлений различают несколько методов.
1.4.1. Метод покоординатного спуска
Здесь возможные направления определяются по ортам ei (единичным векторам по осям координат). Каждая переменная xi последовательно (рис.1.6) оптимизируется, начиная с x1.
Оптимизация может проводиться различными методами, применимыми только для функций одной переменной.
После нахождения
![]() оптимизацию проводят по второй переменной
(x2)
и т.д.
оптимизацию проводят по второй переменной
(x2)
и т.д.
Аналогично проводятся последующие циклы и весь процесс.
Достоинства метода: простота. Недостатки: плохая сходимость для функций типа “овраг”.
1.4.2. Градиентный метод
Возможное направление выбирают противоположным градиенту:
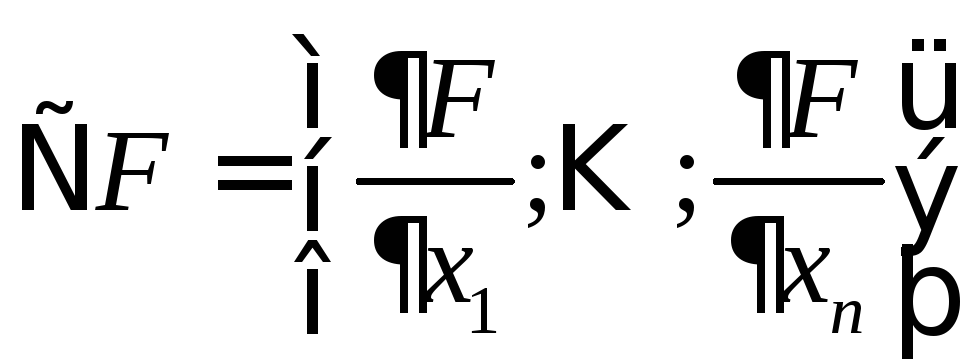
Основное уравнение:
![]() .
.
С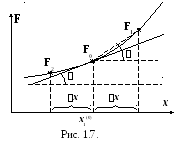 оставляющие
градиента
оставляющие
градиента![]() находятся через конечные приращения
(рис.1.7):
находятся через конечные приращения
(рис.1.7):
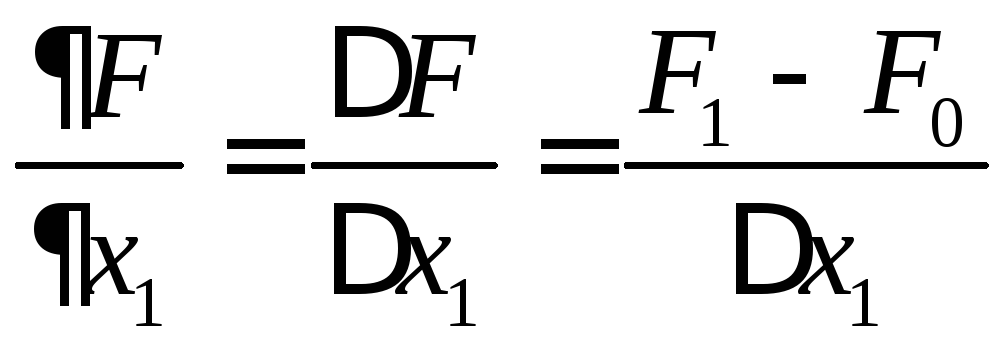 .
.
Так как tg tg, то этот метод имеет погрешность в определении градиента, которая зависит от величины приращения аргумента.
Для снижения погрешности используют метод центрированных приращений.
Градиентный метод часто сочетается с выбором оптимального шага. Для выбора используется пробный шаг t0, в конце которого определяются координаты Х1 и составляющие градиента. По значениям градиента в точках Х и Х1 определяется шаг близкий к оптимальному. Алгоритм метода приведена рис.1.8.:
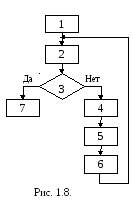
Исходное приближение Х = Х(0);
Определение градиента F |X;
Сравнение |F| < eps;
t0 и определение
 ;
;Определение tОПТ;
Определение
 ;
;
Выход.
Метод широко используется в программах оптимизации режимов.