

1.19. Распределение нагрузки в системе с гэс
Оптимальный режим в системе с ГЭС при неучете изменения напора заключается в подборе таких удельных экономий для каждой ГЭС j , при которых обеспечивается условие баланса по воде за цикл регулирования. Расчетный период в системе с несколькими ГЭС определяется наибольшим циклом регулирования.
Расчет начинается
с исходного приближения для каждой ГЭС![]()
Затем корректируется
характеристики умножением приростов
qj(P)
на j.
После этого начинается цикл по
ступеням графика. На каждой ступени
распределяется нагрузка между станциями
по условию
![]() .
.
После окончания цикла для каждой ГЭС по найденной мощности для каждой ступени определяется расход воды, затем находится средний и сравнивается с заданным. Если небаланс по воде составляет больше 5%, то корректируется и расчет повторяется. Для снижения расхода воды удельная экономия повышается пропорционально величине небаланса, для увеличения расхода – снижается..
1.19.1. Применение динамического программирования для выбора графика сработки водохранилища для гэс
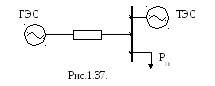
Наиболее точное решение задачи оптимального распределения активной мощности в системе с ГЭС можно найти методом динамического программирования. Рассмотрим систему, в которой ГЭС работает параллельно с обобщенной ТЭС на общую нагрузку (рис. 1.37).
Режим работы ГЭС однозначно определяется изменением отметки ГВБ, поэтому в качестве неизвестной принимаем отметку ГВБ, которую обозначим x(t).
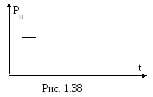
Полагаем, что известен цикл = 24 часа, а также отметка ГВБ в начале и в конце цикла регулирования x0 и xК. Известен также график нагрузки PH(t), представленный ступенями продолжительностью Δt, и прогноз приточности Qпр(t) в м3/с, называемый гидрографом (рис.1,38):
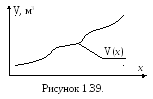
О собенности
зоны затопления позволяют определить
зависимость объема водохранилища от
уровня ГВБV(x).
Известен характер изменения отметки
ГНБ от расхода воды Q,
задана расходная характеристика
эквивалентной ТЭС В(Рт).
собенности
зоны затопления позволяют определить
зависимость объема водохранилища от
уровня ГВБV(x).
Известен характер изменения отметки
ГНБ от расхода воды Q,
задана расходная характеристика
эквивалентной ТЭС В(Рт).
Как известно, динамическое программирование разработано для оптимизации многоэтапных процессов. При этом оптимизация проводится на каждом этапе последовательно, но с учетом влияния результатов на последующие решения.
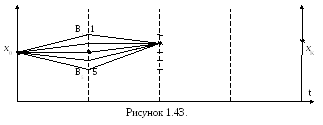
Алгоритм:
При x0 и xi находим V(x0) и V(xi);
Считается расход воды
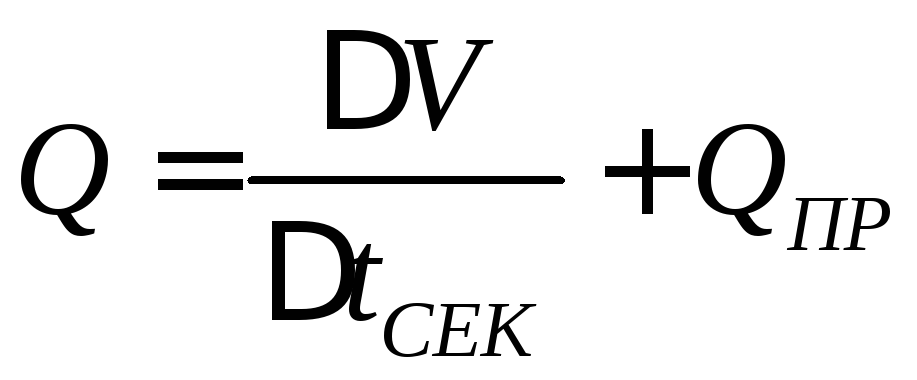 ;
;Находим xГНБ(Q);
Средний напор:
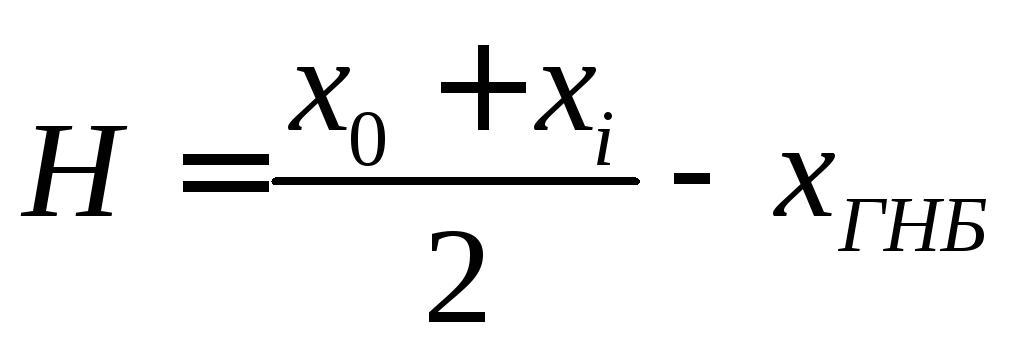 ;
; ;
;
B1>B5.
На втором этапе
для каждого состояния рассматривается
все переходы из возможных состояний в
конце первого, где считаются эффективности
на каждом шаге
![]() .
.
Оптимальное управление на шаге выбирается по минимуму расхода на 1-ом и 2-ом шагах. Это условно-оптимальное управление запоминается. Оптимальный график находится обратным ходом от xК к x0.
Недостаток метода – большой объем вычислений.
1.20. Оптимизация реактивной мощности в системе
В качестве источников реактивной мощности, которые могут использоваться для оптимизации режима энергосистемы, будем рассматривать синхронные генераторы электростанций и синхронные компенсаторы системных подстанций.
Генерация реактивной мощности не связана непосредственно с расходом топлива, но влияет на него через изменение потерь в сети. Таким образом, в качестве критерия принимается минимум потерь с учетом баланса реактивной мощности:
![]() ;
;
![]() ,
,
где q(Q) – потери реактивной мощности в сети,
QH – общая нагрузка, определяется с учетом зарядных мощностей.
Составим функцию Лагранжа:
![]() ,
,
условие минимума которой по всем источникам

позволяет получить следующее равенство
 .
.
Смысл этого условия можно определить, если рассмотреть конечные приращения
 ,
,
т.е. приращения потерь в сети по отношению к изменению реактивной мощности всех источников с учетом потерь на 1 МВАр должны быть равны.
Если в качестве
БУ принять источник Qn,
то для него и всех остальных должно
выполняться условие
 .
В этом случае оптимальные реактивные
мощности можно найти по общей формуле
потерь, полученной ранее для активных
мощностей и аналогичной ей
.
В этом случае оптимальные реактивные
мощности можно найти по общей формуле
потерь, полученной ранее для активных
мощностей и аналогичной ей
![]() .
.
Откуда
и решение в матричной форме
![]() .
.
Здесь вектор CQопределяется по заданным узловым реактивным нагрузкам с использованием коэффициентов токораспределения в R-схеме.
Оптимизация реактивных мощностей должна проводится с учетом ограничений по напряжению.