Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Пермский национальный исследовательский политехнический университет
Кафедра "Конструирование машин и сопротивление материалов"
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по ТММ
Задание № 132 Вариант № 9.
Студента гр. ТМС-09:
Полушкин И.Н.
Руководитель проекта:
Шафранов А.В.
Пермь 2011 г.
Содержание:
Структурный и кинематический анализ механизма:……………………………………...3
Структурный анализ механизма…………………………………………………………………3
Графическое исследование механизма………………………………………………………….4
Построение крайних положений механизма……………………………………………………5
Кинематическое исследование механизма методом планов скоростей………………………6
Построение годографа скорости………………………………………………………………..11
Проектирование эвольвентного зубчатого зацепления:...……………………………….12
Исходные данные………………………………………………………………………………..12
Основные параметры зубчатых колес. Неравносмещенное зацепление………………….….12
Расчет коэффициентов удельных скольжений ………………………..……………………….13
Расчет для инструментального зацепления шестерни Z1=11………………………………...14
Расчет для инструментального зацепления шестерни Z1=19………………………………..15
Силовой расчет механизма………………:………………………………………………..16
Определение внешних усилий…………….……………………………………………………16
Силовой анализ групп Асура……………………………………………………………………17
Расчет мощности двигателя ………………………………………………………………...…..19
Расчет маховика…………..:………………………………………………………………..20
Нахождение приведенного момента сил сопротивления.…………………………………….20
Построение графика работы сил сопротивления и движущих сил…………………………...21
Нахождение избыточной работы……………………………………………………………….21
Нахождение кинетической энергии механизма………………………………………………..22
Построение графика изменения кинетической энергии маховика.…………………………..22
Определение момента инерции маховика……………………………………………..22
Определение веса и размеров маховика……………………………………………….23
Проектирование кулачкового механизма………………………………………….……...24
Построение графиков движения коромысла…………………………………………………..24
Определение минимального радиуса кулачка…………………….…………………….……..24
Профилирование кулачка с коромыслом(теоретический профиль)………………………….25
Построение практического профиля кулачка...………………………………………………..25
Построение графика углов передачи…………………………………………………..26
Список литературы…………………………………………………………….…………...27
1.Структурный и кинематический анализ механизма.
1.1 Структурный анализ механизма.
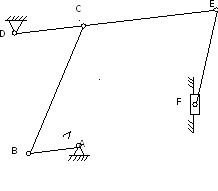
Рис. 1.1
На рисунке 1.1 изображена кинематическая схема механизма.
Степень подвижности определяем по формуле П. Л. Чебышева, так как механизм плоский:

где
 – число подвижных звеньев
кинематической цепи,
– число подвижных звеньев
кинематической цепи,
 - число кинематических парVкласса,
- число кинематических парVкласса,
 – число кинематических парIVкласса
– число кинематических парIVкласса

Разобьем
механизм на группы Ассура. На рис. 1.2
изображена группа Ассура
 ,
на рис. 1.3 изображена группа Ассура
,
на рис. 1.3 изображена группа Ассура ,
на рис. 1.4 изображена механизма первого
класса.
,
на рис. 1.4 изображена механизма первого
класса.
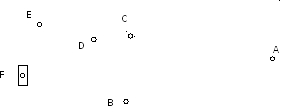
Рис. 1.2 Рис. 1.3 Рис 1.4


1.2 Графическое исследование механизма.
Исходные данные:
lAB=0,105 м
lBC=0,42 м
lCD=0,21 м
lDE=0,462 м
lEF=0,21 м
lx1=0,168 м
lx2=0,253 м
ly=0.346 м
n=225 об/мин
Для построений положений механизма необходимо выбрать масштаб и соответствующий ему масштабный коэффициент. Он находится по формуле:

где lАB – действительная длина звена,
АB– длина, выбранная для чертежа
Определяем длины остальных звеньев, соответствующих выбранному масштабу: