

Bondarenko_RGR_uchebn
.pdf4. Основной параметр при номинальной нагрузке, с 1,
Z |
|
S |
n . |
|
|
||
|
н |
30 н |
|
5. Величина противоЭДС, В, индуктируемая в обмотке якоря при номинальном основном параметре
Ен Uн Rя.н Iя.н .
6. Номинальная электромагнитная мощность, Вт,
|
|
|
|
|
Pэт.н |
|
Eн Iя.н . |
|
|
|
|
||||||
7. Вращающий момент электромагнитного происхождения прино- |
|||||||||||||||||
минальной нагрузке, Н·м, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Мэт.н |
|
Рэт.н |
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
8. Второй основной параметр – скорость идеального холостого |
|||||||||||||||||
хода, с 1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
Uн |
Z |
|
|
|
|
|
|
|
§ |
|
|
R |
I |
· 1 |
|
0 |
|
н |
или |
Z Z |
н |
¨1 |
|
я.н |
|
я.н |
¸ . |
||||||
|
|
|
|
||||||||||||||
|
Eн |
|
0 |
|
|
¨ |
|
|
Uн |
¸ |
|||||||
|
|
|
|
|
|
|
|
|
|
© |
|
|
¹ |
||||
9. Первый основной параметр – скорость вращения, с 1, при мо- |
|||||||||||||||||
менте сопротивления рабочей машины Мс |
2Мн |
|
|
||||||||||||||
|
|
|
Ζ |
|
Uн 2Rя.н Iя.н |
Ζ . |
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
1 |
|
Uн Rя.н Iя.н |
н |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
10. Естественная механическая характеристика: прямая в отрезках |
|||||||||||||||||
с координатами [М |
0; Z |
|
Z0 ] ; |
[М |
|
Mн ; Z |
Zн]. Характеристику |
||||||||||
следует построить в масштабе на миллиметровой бумаге и проверить, с какойточностьюточка [Z Z1 ; M 2Mн] ложитсянаполученнуюхарактеристику (рис. 5.1).
11.Поестественноймеханическойхарактеристике определитьмо-
мент короткого замыкания М Мк и найти третий основной параметр по соотношению
Тм МjΖк0 .
12.Время разгона привода с принятым электродвигателем от ско-
рости покоя Z 0 до скорости номинального режима Z Zн tп (4 5)Tм .
Рис. 5.1
13. Кинетическая энергия вращающихся частей привода, Дж, при номинальном режиме
Wк 12 jZн2 .
14. Потери электроэнергии в приводе, Дж, при пуске системы Д–РМ Ζ 0 до Z Zн
'W 0,5 j Zн2 .
15. Электрическая энергия, Дж, поступающая от сети к двигателю за время пуска,
Wэ Wк 'W .
16. Средняямощность, Вт, потребленияэнергии изсетиприпуске
Pcр.п Wэ .
tп
17. Сопоставление средней пусковой мощности с мощностью номинального режима:
P |
Рср.п Kн |
. |
|
||
ср.п |
Рн |
|
|
||
Примечание 1
Здесь можно остановиться и сделать выводы в направлениях:  оценкимоментакороткогозамыканияпосравнениюсноминаль-
оценкимоментакороткогозамыканияпосравнениюсноминаль-
ным вращающим моментом;
100 |
101 |
 сопоставления скоростей Ζ0 , Ζн и Ζ1, а также напряжения и противоЭДС;
сопоставления скоростей Ζ0 , Ζн и Ζ1, а также напряжения и противоЭДС;
 сравнениямощностипускасноминальнойустановленноймощностью потребления энергии двигателем из сети.
сравнениямощностипускасноминальнойустановленноймощностью потребления энергии двигателем из сети.
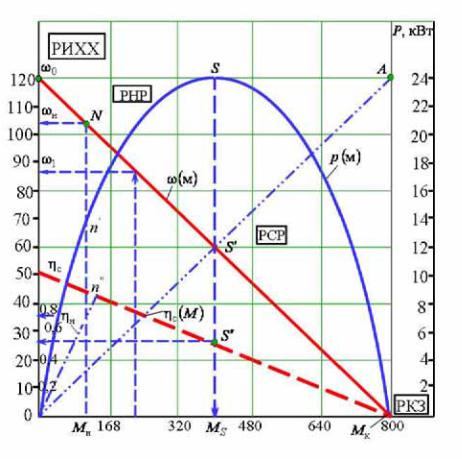
18. Аналитическиезависимостиианализнагрузочныхрежимовпо графикамтехнико-экономическихпоказателейприводасзаданнымэлек- тродвигательным устройством (ЭДУ).
ЗаданноеЭДУтипаП-71; Pн 10 кВт; nн 1000 об/мин; Uн 220 B;
Iн 63 A ; GD2 1,3 кг м2 .
Расчет параметров и построение естественной механической характеристики по заданному варианту выполнены по алгоритму 1–17 с результатами:
1) |
Iя.н |
61,11 A; |
2) |
Κн |
0,7215 ; |
3) |
Rя.н |
0,5013 Ом; |
4)Ζн 104,72 с 1;
5)Ен 189,365 В;
6)11 572 Вт;
7)110,5 Н м;
8)121,66 с 1;
9)Ζ1 87,77 с 1;
10)рис. 5.2;
11) Ω 0,03296 кг м, Мк 793,59 Н м, Тм 0,00606 с;
12)tп 0,02525 c;
13)Wк 180,72 Дж;
14) Wэ 361,44 Дж;
15)Рср.п 14 314,455 Вт;
16)Рср.п 10,32 Вт.
Зависимости Р(М,Ζ) и Κ (М,Ζ) поданнымграфикаестественной механической характеристики ЭДУ (см. рис. 5.2) получаются также
и при использовании аналитического выражения естественной механической характеристики,
где Ζ Ζ0 |
R |
M CE CМ Ζ0 Ζ0 M к1 М2 . |
|
||
|
CECM |
|
Рис. 5.2
Примечание 2
 МощностьнавалуЭДУсучетомграничныхусловийестественной механической характеристики двигательного режима:
МощностьнавалуЭДУсучетомграничныхусловийестественной механической характеристики двигательного режима:
P Ζ M Ζ M Ζ M 1 |
М |
Ζ M (1 |
M 1 |
М); |
|
0 |
0 к |
|
2 0 |
к |
|
102 |
103 |

 коэффициент полезного действия системы Д–РМ, работающей в естественных условиях при равенстве коэффициентов СЕ и СМ в зависимости от момента на валу – нагрузки со стороны рабочей машины
коэффициент полезного действия системы Д–РМ, работающей в естественных условиях при равенстве коэффициентов СЕ и СМ в зависимости от момента на валу – нагрузки со стороны рабочей машины
|
Р |
|
Z М |
|
M |
||
Kс |
|
|
|
1 |
|
|
; |
Р |
|
U I |
M |
|
|||
|
с |
|
|
|
|
к |
|
график Kс(М, Z) есть прямая (см. рис. 5.2), пересекающая оси |
|||||||
координат Z Kс М (в точках М 0 ; Kс |
1 ; Z Z0 ) ); |
||||||
графическая зависимость Р(М, Z) по данным расчета является квадратичной функциейи представляет собой параболу с осью симмет-
рии, п араллельн о й о си Р и расположенной на примерном расстоянии |
||
0,5Мк от точки Р |
0 ; функция имеет два нуля при Z Z0 , М 0 |
|
и Z |
0, М Мк |
793,59 Н м (см. рис. 5.2). |
|
Расчет зависимости Р(М, Z) с учетом параметров естественной |
|
механической характеристики (см. рис. 5.2) можно выполнить быстро
иточно с помощью МК-52.
19.Сравнительный анализ технико-экономических показателей привода, работающего в естественных электромеханических условиях двигательного режима (см. рис. 5.2).
Обобщения и выводы
Изграфиков Ζ(М),Κс(М, Ζ) и Р(М , Z) видно, чтоприестественных электромеханических условиях ЭДУ типа П-71 в приводе может иметь, кроме режима идеального холостого хода (РИХХ) и режима номинальной работы (РНР), другие двигательные режимы, при которых мощностная нагрузка на валу электродвигательного устройства не можетбыть более 24,2 кВт– режим согласованнойработы(РСР), а моментнаянагрузканеможетбытьболее793,6 Нм– режимкороткогозамыкания (РКЗ). При возрастании момента сопротивления рабочей машины сверх 400 Н м автоматически начинает падать механическая мощность, развиваемая ЭДУ. Режим согласованной работы и режимы короткого замыкания можно сравнить с РНР по таким относительным технико-эко- номическим показателям:
м автоматически начинает падать механическая мощность, развиваемая ЭДУ. Режим согласованной работы и режимы короткого замыкания можно сравнить с РНР по таким относительным технико-эко- номическим показателям:
Z |
н |
105 |
|
K |
0,72 |
|
Kнс |
0,84 |
|
|||
|
|
|
1,75; |
н |
|
1,44; … |
|
|
|
|
1,68; |
|
Z |
s |
|
60 |
K |
0,5 |
K |
нs |
|
0,5 |
|||
|
|
|
|
нs |
|
|
|
|
|
|
||
104
Рн |
11,6 |
0,48; |
Мн |
112 |
0,14; |
Мк |
793,59 |
1,98, |
||
Р |
24,2 |
М |
к |
793,59 |
М |
s |
400 |
|||
s |
|
|
|
|
|
|
|
|
||
которые показывают, что с увеличением моментной нагрузки на ЭДУ более чем в 3,5 раза по сравнению с номинальной наблюдается снижение скорости вращения системы Д–РМ в 1,75 раз, а ее КПД – в 1,68 раз.
Указаниеповыборумасштабарасчетныхвеличин: величинаосновного параметра Z в двигательном режиме не можетбыть более скорости РИХХ Z0 , а величина электромагнитного вращающего момента – более значения момента РКЗ
|
§ |
|
Z |
н |
· |
1 |
|
М Мк |
¨ |
|
¸ |
|
м, |
||
Мн¨1 |
|
Z0 |
¸ |
, Н |
|||
|
© |
|
¹ |
|
|
||
при этом величина мощностной нагрузки на валу ЭДУ не может быть более мощности РСР, Рs 0,25 M к Z0 .
Вкачествевыводовследуетсказать, чтозаданнуюсистему Д–РМмож- но длительно использовать в пределах нагрузочных режимов РИХХ–РНР, а в режимах РСР и РКЗ – кратковременно в целях получения значительной мощности преобразования механической энергии и крутящего момента на валу двигателя при низких технических Z и экономическихKс показателях. Кратковременность использования системы в последних режимах диктуется опасностью перегрева обмоток ЭДУ за счет значительныхтоковивыходаегоизстроя, поэтомувпроцессетехнической эксплуатации электродвигателей необходимо постоянно следить за нагрузкой, не допуская их перегрева.
Комментарий
Так как аналитическое выражение механической характеристики системы Д–РМ постоянного тока имеет вид
Ζ Ζ |
R |
М, |
|
||
0 |
CECМ |
|
|
||
то коэффициент пропорциональности при вращающем моменте характеризуетжесткостьестественноймеханическойхарактеристикииливнутреннюю механическую статическую устойчивость ЭДУ по отношению к нагрузке рабочей машины. Обозначим этот коэффициент символом s иназовемегокрутизнойестественноймеханическойхарактеристикисистемы Д–РМ.
105
Тогда
s |
|
R |
|
|
Ζ0 |
|
Ζ |
|
TM |
, |
|
c |
|
. |
|||
C |
|
C |
|
U / RC |
|
M |
|
|
|
|
|
2 |
|||||
|
E |
M |
|
к |
|
j |
кг |
м |
|
||||||||
|
|
|
|
M |
|
|
|
|
|
|
|
|
|||||
Чем больше величина сопротивления якорной цепи R и чем мень- шемоментинерциисистемыД–РМ, тембольшекрутизна s, т. е. меньше жесткостьестественноймеханическойхарактеристики. Знак«минус» перед крутизной говорит о падающем характере зависимости Ζ(М).
Вэтом случае мощность на валу системы с учетом зависимости
Ζ(М) будет иметь вид
Р Ζ М (Ζ0 s M ) М Ζ0М sM 2 .
Это выражение соответствует параболе с вершиной вверху, координаты которой определяются соотношениями Мs 0,5Мк и Рs 0,25 Ζ0Мк. Точка вершины параболы Р(М) характеризует та- кой режимсистемы, при котором абсолютное значение крутизны s ЭДУ равно крутизнемеханическойхарактеристикиРМ, т. е. статическоедвижение такойсистемыустойчивои являетсясогласованным. Поэтомурежим точки s (см. рис. 5.2), лучше называть режимом согласованной работы или просто согласованным режимом.
Тогда КПД системы Д–РМ для случая Сs |
СМ может рассчиты- |
||||||||
ваться по соотношению |
|
|
|
|
|
|
|
|
|
|
Р |
Ζ |
M (1 SMΖ 1) |
|
|
М |
|||
Κс |
|
0 |
0 |
1 |
|
|
. |
||
U I |
|
|
M |
|
Мк |
||||
|
|
CEΖ0 CМ |
|
||||||
|
|
|
|
|
|
|
|||
Часть 2 Построение механических и регулировочной характеристик
двигателя с параллельным возбуждением
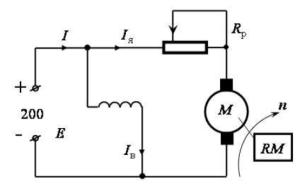
Используяданные, полученныевышедополнитьрасчетыследующими пунктами(пренебрегаемвнутреннимсопротивлениемисточникапитания):
1) выбратьсопротивлениерегулировочногореостата Rp.max (рис. 5.3);
2) построить механические характеристики n |
|
f (M ) (n – число |
|||
об/мин) при номинальном напряжении R |
|
0 |
; Rp |
2 |
0,5Rp.max |
p |
|
|
|
||
|
1 |
|
|
|
|
иRp3 0,5Rp.max ;
3)аналитически определить диапазон регулирования частоты вра-
щения nн при номинальном моменте Мн;
Рис. 5.3
4) выбратьмоментнагрузкидляполучениянаилучшегодиапазонарегулировкичастотывращенияипостроитьрегулировочнуюхарактеристику; 5) определить углы наклона i i 1, 2, 3 механических характе-
ристик; электромеханические постоянные времени Tэм и времена пере- |
|||||
ходных процессов в соответствии с этими Tэм. |
|||||
Имеемпри Rp |
0 ; |
Мmax 793,59 Н м, приполностьювключен- |
|||
|
1 |
|
|
|
|
ном реостате Rp3 |
0,5Rp. max пусковой момент равен M н 110,5 Н м, |
||||
при этом R |
U |
r |
3,099 Ом. I |
я.н |
61,11 А. |
|
|||||
p.max |
Iя.н |
я |
|
|
|
Для построения трех механических характеристик рассчитаем:
а) пусковой момент при Rp2 |
0,5Rp.max 1,55 Ом и пусковой ток |
|||||||||||||||
|
|
Iп2 |
|
|
Uн |
|
|
|
107,28 А, |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
rя Rр2 |
|
|
||||||||||
а пусковой момент составит |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Iп |
|
|
110,5 107,28 |
|
|
|
|
||||||
Мп2 |
Mн |
1 |
|
|
|
|
|
|
|
|
|
|
|
193,9 Н м; |
||
Iя.н |
|
|
|
|
61,11 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
б) пусковой |
|
момент |
при |
|
|
Pp3 Pp.max M п3 110,5 Н м, |
||||||||||
пусковой ток Iя.п3 |
|
Uн |
|
|
|
|
|
220 |
|
|
Iя.н |
61,11 А, пусковой |
||||
|
rя Rp3 |
|
|
0,5013 3,099 |
|
|||||||||||
ток без реостата равен Iя.пуск |
|
|
|
U |
|
|
220 |
|
|
438,86 А. |
||||||
1 |
|
|
rяА |
0,5013 |
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
106 |
107 |
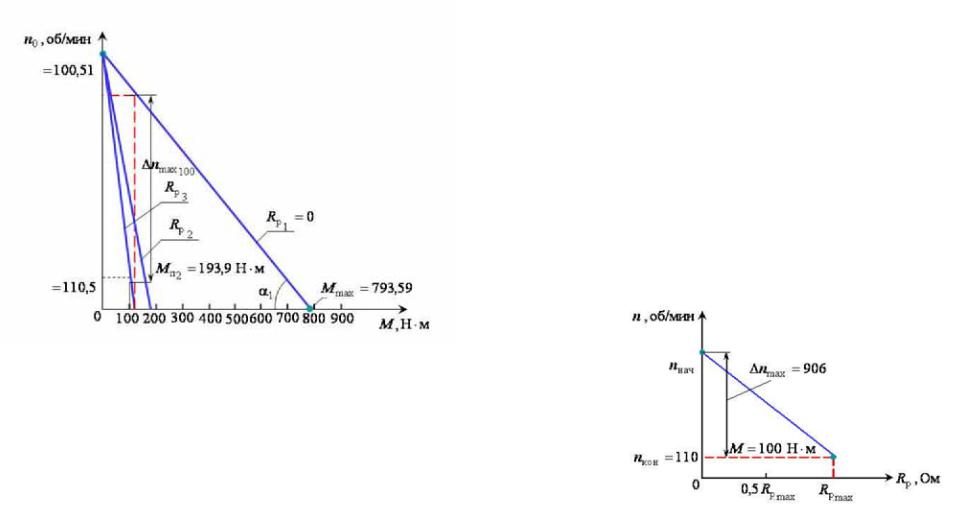
Кривые построены на рис. 5.4.
nн
Mн
Рис. 5.4
Предварительно определим характерные частоты
n0 |
60 Ζ |
1162 об/мин; |
||
2Σ |
|
|||
|
|
|||
nн |
1000,51 об/мин. |
|||
Аналитическоеопределениедиапазонарегулированиячастотывращения:
|
|
|
|
n |
max н |
Rp.max Mн , |
|
|||||||
где |
|
|
|
|
СЕСМФ2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
Е |
С |
М |
Ф2 |
(U |
я.н |
|
I |
r ) |
|
Мн |
|
||
|
I |
|
|
|
||||||||||
|
|
|
|
|
|
я.н я |
|
n |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
я.н н |
|
||
(220 0,5013 61,11) |
|
|
110,5 |
|
|
|
0,342; |
|||||||
61,11 1000,57 |
|
|||||||||||||
nmax н 1000,58 об/мин
близкое совпадение расчетных данных.
С учетом 10 % запаса по моменту для регулирования частоты вращения (исключая очень низкие частоты) определим nmax100 при
M 100 Н м, тогда nmax |
|
Rp.max |
100 |
|
906 об/мин. Даннуювели- |
|||||||
|
СЕСМФ2 |
|||||||||||
|
|
100 |
|
|
|
|
|
|||||
чину полезно сравнить с полученной из графика рис. 5.4. |
||||||||||||
Начальное значение частоты вращения |
|
|
|
|
||||||||
nнач n0 |
|
rяM |
1162 |
|
0,5013 100 |
1016 об/мин. |
||||||
СЕСМФ2 |
|
0,343 |
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
Конечное значение частоты вращения |
|
|
|
|
||||||||
nкон |
nнач nmax10Ф |
1016 906 |
110 об/мин. |
|||||||||
Согласно полученным данным строим графики регулировочной |
||||||||||||
характеристики n |
|
f (Rp ) для M н |
100 Н м – рис. 5.5. |
|||||||||
Рис. 5.5
Определим углы наклона механических характеристик,
1 arctg m |
n0 |
arctg |
|
793,59 |
|
n0 |
45 |
$ |
; |
Mп1 |
1162,0 |
793,59 |
|
||||||
|
|
|
|
|
|
||||
108 |
109 |
D2 |
arctg |
|
793,59 |
|
|
n0 |
76,26 |
$ |
; |
|||
1162,0 |
193,9 |
|
||||||||||
|
|
|
|
|
|
|
||||||
|
D3 |
arctg |
793,59 |
|
82,1$. |
|
|
|||||
|
|
|
|
|||||||||
|
|
|
110,5 |
|
|
|
|
|||||
Расчет электромеханических постоянных и условных длительностей переходных процессов, с, произведем по формулам
T |
|
W |
Z0 |
0,00505; |
t |
|
| 3T |
0,01515; |
|
|
|
||||||
эм |
|
M п.н |
|
пер1 |
||||
|
1 |
|
|
|
эм1 |
|
||
T |
W |
|
Z0 |
0,00209 ; |
t |
|
| 3T |
0,0627 ; |
|||
|
|
|
|||||||||
эм2 |
|
M |
|
|
|
пер2 |
|||||
|
|
п2 |
|
|
|
|
эм2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
T |
W |
Z0 |
|
0,00363; |
t |
|
|
| 3T |
0,1089 . |
||
|
|
|
|
||||||||
эм3 |
|
|
M п |
|
|
пер3 |
|||||
|
|
|
|
|
|
эм3 |
|
||||
|
|
|
|
3 |
|
|
|
|
|
|
|
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА № 6
Анализ переходных процессов в цепях первого порядка
Большое число промышленных установок, измерительных цепей, технологических процессов, биологических явлений и т. п. могут быть
впервомприближениипредставленыввидепростейшихмоделей– схем, содержащих один реактивный элемент (либо индуктивность, либо емкость) и произвольное число источников энергии и резисторов. Такие цепи называются разветвленными цепями первого порядка.
Предыдущие РГР были посвящены анализу процессов в электротехнических цепях и системах при установившихся режимах работ, т. е. режимах, существующих при длительном воздействии источников напряжения и/или тока. Однако как раз большинство устройств работают
втак называемых переходных режимах, возникающих в результате различных коммутаций. Под коммутацией понимаются разного рода включения, выключения, переключениянагрузкииисточниковэнергии, атакже любые изменения параметров элементов или структуры электрической цепи. Можно принять, что коммутация осуществляется мгновенно, но возникающий при этом переход цепи к новым установившимся значениямтоковинапряжений ветвейпроисходитнемгновенно, а заканчивается через некоторое время (теоретически – бесконечно большое).
Это обстоятельство объясняется тем, что процесс преобразования иизмененияэнергии, накопленнойвреактивныхэлементахL иC, требует некоторого времени. Изменение энергии не может происходить скачкообразно. Отсюда возникают законы коммутации: потокосцепление
вL-элементе и заряд в С-элементе должны изменяться непрерывно, что приведет к выводу о непрерывности изменения тока в L-элементе и напряжения на С-элементе при неизменности параметров L и С. При этом токи в сопротивлениях и емкостях, а также напряжения на сопротивленияхи индуктивностяхмогутизменятьсяскачком. Еслиположить, чтокоммутацияпроисходит при t 0 , то математическаяформулировка этих законов следующая:
\(0 ) \(0 ); q(0 ) q(0 ); iL (0 ) iL (0 )uC (0 ) uC (0 ),
где t 0 – последний момент времени до коммутации; t 0 – первый момент времени сразу же после коммутации.
110 |
111 |
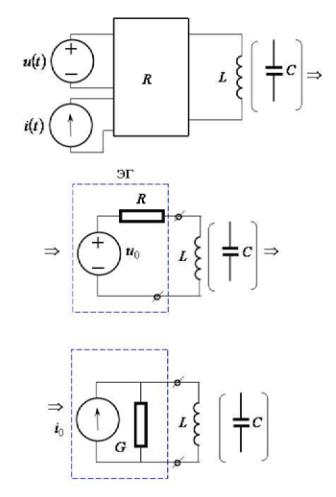
Любаяразветвленнаяцепьпервогопорядкаотносительнореактивного элемента L или С может быть на основании теорем Тевенина или Нортонапредставленаоднимэквивалентнымисточникомнапряженияили тока(рис. 6.1), чтопозволяетсразужеопределитьреакцию(тока iL (t) или напряжения uC (t) на емкости).
э
э
Рис. 6.1
Также несложно найти и постоянную времени цепи 
Ω |
L |
L |
; Ω |
C |
СR , |
|
|||||
|
Rэ |
э |
|||
|
|
|
|
||
где Rэ– сопротивление эквивалентного характера. Остальные реакции
находятся по законам Ома и/или Кирхгофа для всех требуемых ветвей. R – разветвленнаяR-цепьсвынесеннымвлевопроизвольнымчислом источников энергии u(t), i(t) и одним элементом L или С (в скобках);
uС – эквивалентныйисточникнапряжениясвнутреннимсопротивлением
Rэ; i0 – эквивалентный источник тока.
Схемапорис. 6.1 можетбытьсоставленакакдомоментакоммутации
t τ 0 . Для простоты полагается, что u(t) U и i(t) I – т. е. режим постоянного тока.
Решение производится согласно алгоритму без составления дифференциальных уравнений.
1.Алгоритм принимается в предположении, что до коммутации
вцепи был установившийся режим. При этом L-элемент закорачивается, а С-элемент – размыкается (при постоянных воздействиях).
2. Если С и L не меняются, то i1(0 ) i1(0 ) ; uС (0 ) uС (0 ) . 3. Определяютсявынужденныесоставляющие iLв , uCв при t ο φ ,
для чего опять ветви с L-элементами закорачиваются, а ветви сС-элементамиразмыкаются. Расчетыпопп. 1–3 производятсядляцепей известными методами.
4. Определяются постоянные времени |
ΩL |
|
|
|
|
L |
; |
Ω |
С |
СR , где |
R |
||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
э |
э |
||
находитсяотносительнозажимовреактивныхэлементовприисключении |
|||||||||||||||||
источников энергии. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. Рассчитываются реакции в реактивностях по формулам |
|
||||||||||||||||
|
|
t i |
|
>i 0 i |
е |
t |
|
|
|
|
|
||||||
i |
L |
|
Ω ; |
|
|
|
|
||||||||||
|
|
Lв |
L |
Lв |
|
|
t |
|
|
|
|
||||||
u t i |
|
>i 0 i |
е |
|
|
|
|
||||||||||
Lв |
Ω |
. |
|
|
|
|
|||||||||||
|
C |
|
L |
Lв |
|
|
|
|
|
|
|
|
|
|
|
||
Второе слагаемое дает свободные составляющие реакций: |
|
||||||||||||||||
|
|
|
iL (t) |
iLв iCв (t); |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
uC (t) uC |
uC C |
. |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 в |
|
|
|
|
|
|
|
|
|
|
|
112 |
113 |
Примечания. 1. При нахождении других реакций наряду с указан-
ными в п. 5 следует ввести при t 0 дополнительные источники энергии: вместо L-элемента – источник тока i(0 ), а вместо С-элемента –
источник напряжения uC (0 ).
2. Еслиисходитьтолькоиз iL (t) и uC (t) , томожноизбежатьвыпол- нения п. 1 примечания.
Варианты заданий представлены в табл. 6.1 и 6.2.
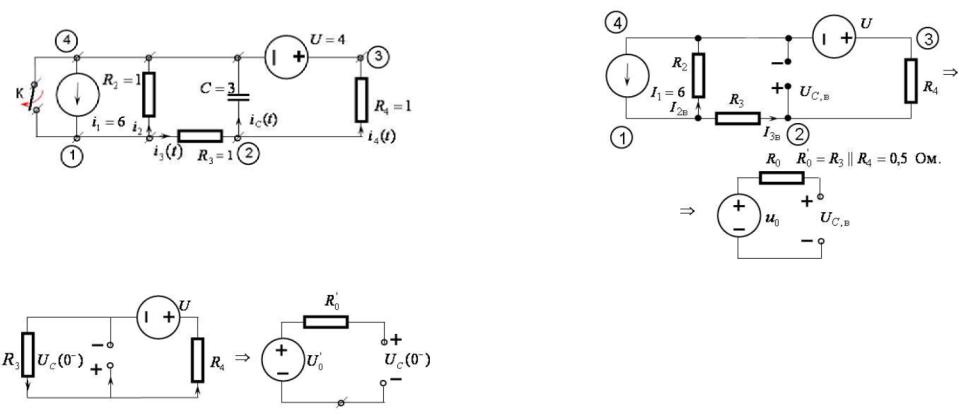
Пример решения задачи № 25 из табл. 6.2. Поскольку обе задачи однотипны, решим лишь одну из них.
Дано: |
141 ИT I1 6 ; 214 R2 |
1; 423 R4 |
1; 524 С5 3 ; |
|
634 ИH ; U |
6 |
3; 714 K , размыкается. Определить i (t). |
||
|
|
|
2 |
|
Рисуем схему заданного варианта (рис. 6.2). |
|
|||
Рис. 6.2
Согласно п. 1 алгоритма и с учетом того, что ключ К шунтирует источник тока и резистор R2, получаем схему, показанную на рис. 6.3.
Рис. 6.3 114
U0' |
U R3 |
2 (B) UC (0 ) ; |
|
||
|
R4 R3 |
|
R' |
R || R 0,5 Oм. |
|
0 |
3 |
4 |
По п. 2 алгоритма имеем (величина С неизменна):
UC (0 ) UC (0 ) 2 В.
Наоснованиип. 3 получимпри t ο φ дляустановившегосянапряжения на емкости из рис. 6.4, используя метод положения:
U |
С,в |
I1 (R3 R4 ) |
|
|
|
U |
|
(R |
|
R ) |
14 |
В. |
||||
|
R |
|
R R |
|
|
|
3 |
|||||||||
|
R |
2 |
R R |
4 |
|
2 |
4 |
|
2 |
3 |
|
|||||
|
|
|
3 |
|
|
3 |
|
|
|
|
|
|
||||
Рис. 6.4
Первый член UC,в рассчитан при действии I1 и отсутствии U ,
авторой – придействииU иисключении I . U 0 UC ,в, R0 |
R4 || R2 |
|||||
|
|
|
|
|
1 |
|
R |
2 |
Oм |
R |
э |
Oм. |
|
|
|
|||||
3 |
3 |
|
|
|
|
|
|
|
|
|
|
2 c. |
|
Согласно п. 4 находим постоянную времени ΩС СRэ |
||||||
По п. 5 выписываем реакцию uС(t) : |
|
|||||
|
|
|
|
|
115 |
|

|
|
t |
|
|
t |
|
|
|
|
|
|
|
|||
uС t |
uС,в uС(0 ) uС,в e |
ΩС 14 |
|
8 e |
2 . |
||
|
|
3 |
|
3 |
|
|
|
По первому закону Кирхгофа находим искомый ток I2 : |
|||||||||||||||||||||
i2 t |
I1 i3 t |
I1 ic (t) i4 (t) . |
|||||||||||||||||||
Ток в емкости составит |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
duC t |
|
♣ |
4 |
∙ |
|
t |
|
|
|
t |
|
|
|||||||
|
|
|
|
|
|
|
|||||||||||||||
i |
С |
|
|
|
|
3♦ ÷ e |
2 |
|
|
4e 2 . |
|||||||||||
|
|
|
|
|
|||||||||||||||||
C t |
|
dt |
|
|
|
♥ |
3 |
≠ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Ток в сопротивлении R4 равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
i4 (t) UС (t) U |
|
|
|
|
|
2 |
|
|
|
t |
|||||||||||
|
1 |
|
|
83 |
|
8 e |
|||||||||||||||
|
|
|
|
2 |
. |
||||||||||||||||
R4 |
|
|
4 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|||||
|
|
16 |
|
4 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Искомый ток i2 (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3 |
3 |
e 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
График реакции i2 (t) приведен на рис. 6.5.
Рис. 6.5
Еслибызадалисьцельюсразуопределить i2 t , минуярасчет uС t , топоп. 2 алгоритмасогласнопримечанию(п. 1) необходимоопределить
i2 0 согласно схеме (рис. 6.6).
В данном случае по принципу суперпозиции получим:
i |
0 |
I |
R2 || R3 |
|
uС(0 ) |
4 A. |
|
|
|||||
|
2 |
1 |
|
R2 R3 |
|
|
|
|
|
R2 |
|
|
|
Рис. 6.6
От источника U вклад в значение тока i2 0 отсутствует из-за короткого замыкания ветви с емкостью:
i |
I |
R2 || R3 R4 |
|
|
|
|
|
U |
|
16 |
A, |
||||||
|
|
|
|
|
|
|
|
||||||||||
2в |
1 |
R2 |
|
|
|
|
|
|
|
R2 R3 R4 |
3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
и искомая реакция составит: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
i2 t i2в i2 (0 ) i2в e |
t |
16 |
|
|
|
4 |
e |
t |
|
|
|
|
|||||
Ω |
|
|
|
2 |
, |
|
|
|
|||||||||
|
|
|
3 |
|
3 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
т. е. полученный выше результат.
Комментарий
До коммутации ток i2 был равен 0 (см. рис. 6.2). Таким образом, скачок тока в результате коммутации составил 4А. То же можно заме-
тить и относительно тока в емкости |
iС |
|
0 |
, |
|
4 A |
. |
|
0 |
|
iС 0 |
|
116 |
117 |