

Bondarenko_RGR_uchebn
.pdfРис. 10.6
10. Годовойэкономическийэффектотустановкикомпенсатора, если электромеханизмы будут работать при номинальной нагрузке и нагрузке, близкой к реальной (случай 2), по 24 ч в рабочие сутки.
10.1. Число рабочих часов в году, например при 306 рабочих днях
А 24 306 7344 ч.
10.2. Среднее действующее значение тока в линии: до установки компенсатора (случай 1)
|
S |
35,81 103 |
|
|
||
I1 |
1 |
|
|
|
53,46 A ; |
|
3Uc |
3 387,2 |
|
||||
|
|
|
||||
I2 |
S2 |
|
39,84 103 |
58,91 A ; |
||
3Uc |
3 387,2 |
|||||
|
|
|||||
после установки компенсатора, когда cos Μ 1,
|
P |
31,82 103 |
|
|
Ik |
с |
|
47,58 A . |
|
3Uc |
3 387,2 |
|||
|
|
10.3.Уменьшение потерь активной мощности в линиях системы
иэкономия электроэнергии в системе.
Примечание. Потеря активной мощности в линиях и сетях определяется по формуле
Р |
1,1 n ΥI |
2 L |
10 |
3 |
кВт, |
|
|
S |
|
||||
|
|
|
|
|
|
|
где 1,1 – коэффициент, учитывающий сопротивление переходных контактов, скрутку жил и способ прокладки линий; n – число фаз в кабельной линии; I – действующее значение тока в линии, А; Υ – удельное со-
противление материала жилы и кабеля: Υ ϑ 1 0,0312 мм Ом/м; L – длина кабельной линии от РП до двигателя, м.
Тогда уменьшение потерь мощности в линиях одной установки
P |
1,1 n Υ |
L |
(I 2 |
I |
2 ) 10 3 |
|
|
|
|
|
S |
|
|
|
|
||||||
1 |
|
|
1 |
k |
|
|
|
|
||
1,1 3 0,0312 |
50 |
(53,462 47,582 ) 10 3 |
0,19 |
кВт; |
||||||
|
|
16 |
|
|
|
|
|
|
|
|
P |
1,1 n Υ L |
(I 2 |
I |
2 ) 10 3 |
|
|
|
|
||
1 |
|
|
S |
2 |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,1 |
3 0,0312 |
50 |
(58,912 |
47,582 ) 10 |
|
3 |
0,39 |
кВт, |
||
16 |
|
|||||||||
аэкономияэлектрическойэнергиизарабочийгодсистемойиз20 рабочих электромеханизмов 3-го класса
6W1 |
20 P1 A |
20 0,19 7344 |
27 907,2 кВт-ч; |
6W2 |
20 P2 A |
20 0,39 7344 |
57 283,2 кВт-ч. |
10.4.Годовой экономический эффект, если стоимость 1 кВт-ч
с0,9 р. кВт-ч, составит
С1 |
с 6W1 |
0,9 27 907,2 |
10 026 р.; |
С2 |
с 6W2 |
0,9 57 283,2 |
51 555 р. |
178 |
179 |
Обобщение |
в этом случае достигает более 57 МВт-ч, а годовой экономический эф- |
|
Надежная работа электрических двигателей зависит не только от |
фект в денежном выражении – суммы более 51 555 р. |
|
Выводы |
||
правильного выбора мощности, но и от выбора их конструктивного ис- |
||
полнения, котороедиктуетсятребованиямитехникибезопасностиипро- |
|
|
тивопожарнойтехники, атакжезависитотправильнойсхемыподключе- |
1. Электродвигательное устройство в приводе при техническойэк- |
|
ния ЭДУ к питающей сети. Если электрический двигатель типа А2-72-4 |
сплуатации должно быть загружено номинально и иметь коэффициент |
|
вусловияхзаданнойсетиподключитьпосхеме«треугольник», тоонне- |
мощности по величине не ниже 0,92…0,95, если желать экономичного |
|
пременно выйдет из строя, так как на его фазах вместо рассчитанного |
использования электрической энергии. |
|
номинального напряжения 220 В будет действовать 380 В. |
2. Надежная работа ЭДУ будетв томслучае, если его конструктив- |
|
Характер и количественные показатели работы электродвигателя |
ное исполнение выбрано верно, а схема соединения обмотки статора |
|
приноминальномрежимерабочегомеханизмавидныизрезультатоврас- |
выполнена с учетом напряжения заданной сети. |
|
чета параметров Г-образной схемы замещения ЭДУ. При частоте тока в |
3. Правильный выборпитающегокабеля, а также средствуправле- |
|
статоре50 ГцчастотаЭДСитокавобмоткеработающегороторасостав- |
нияи защиты ЭДУ от длительной перегрузки итоковкороткого замыка- |
|
ляет всего 1,68 Гц. Номинальный вращающий момент на валу незначи- |
нияпозволяетиметьнадежную, безопаснуюидолговечнуюсистемуэлек- |
|
тельноотличается от электромагнитного (всего на 0,4 %), поэтомусрав- |
троприводов, котораяобеспечит требуемую производительность и каче- |
|
нительно простопостроенаестественнаямеханическаяхарактеристика, |
ство продукции. |
|
которая показала несоответствие пусковых расчетных данных каталож- |
4. Установка компенсатора реактивной энергии в систему электро- |
|
ным и позволила предложить технику пуска такого двигателя с нагруз- |
снабженияасинхронныхэлектроприводоврабочихмашинимеханизмов |
|
кой не более 60 % от номинальной. Коэффициент мощности асинхрон- |
экономит электроэнергию за счет уменьшения потерь мощности в ка- |
|
ного ЭДУ при холостом ходе очень мал (0,11), но реактивная мощность |
бельных линиях и повышает производительностьэлектромеханизмов за |
|
значительна и достигает более 3 кВАр. Потери активной мощности |
счет уменьшения падений напряжения между источником и потребите- |
|
вдвигателевбольшеймеренаблюдаютсявстаторе (более2 кВт), значи- |
лем электроэнергии, что равносильно повышению величины напряже- |
|
тельноменьшиепотери(около0,98 кВт) – вобмоткеротора, потеримощ- |
нияназажимахобмоткистатораи, какследствие, квадратичномуувели- |
|
ности в механической части незначительны и составляют величину ме- |
чению вращающего момента ЭДУ. |
|
нее 120 Вт. |
5. Анализ асинхронных двигателей по их каталожным данным по- |
|
Надежная работа установки определяется правильным выбором |
зволилкомплекснонаоснованиипараметровГ-образнойсхемызамеще- |
|
кабеля, магнитногопускателяи предохранителей, типкоторыхвполной |
нияизучитьмеханическиехарактеристики, процесспреобразованияэнер- |
|
мере зависит от расчетных параметров ЭДУ. Даже на длине кабеля 45 м |
гии, выбратьсечениежилкабеляэлектроснабжения, средствуправления |
|
наблюдаютсяпотеринапряжения(более7 В) имощности(более0,7 кВт). |
изащитыотдлительныхперегрузокитоковкороткогозамыкания, атак- |
|
Экономичная работа системы 20 электромеханизмов достигается |
же предложить технические и организационные мероприятия по более |
|
полной номинальной загрузкой каждого ЭДУ. Но даже при этом уста- |
эффективнойэксплуатациитакихэлектродвигательныхустройстввсис- |
|
новка работает не совсемэффективно, ее коэффициент мощности мень- |
теме рабочих механизмов 3-го класса. |
|
ше единицы – 0,89. И только решение установить компенсатор реактив- |
|
|
нойэнергииемкостногохарактерапозволилдостичьпредельнойэффек- |
Комментарий |
|
тивности при номинальной нагрузке и сэкономить за год на системе |
ξ |
|
Если определить ток Iχ из эквивалентной схемы замещения |
||
вцеломболее27 МВт-чэнергии. Большийэффектотустановкикомпен- |
||
2 |
||
саторов получается в случае, близком к реальному. Экономия энергии |
на рис. 10.3, то его комплекс и модуль составят соответственно: |
|
|
180 |
181 |
ξ |
|
|
|
|
|
|
|
|
ξ |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
U1ф |
|
|
|
|
|
||||
I2c |
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||
§ |
|
|
|
rc |
· |
|
|
|
|
|
|||||||
|
|
¨r |
|
|
2 |
¸ |
j x xc |
|
|
||||||||
|
|
|
|||||||||||||||
© |
1 |
|
|
|
S ¹ |
|
|
1 |
2 |
|
|
|
|||||
I2c |
|
|
|
|
|
|
|
|
|
|
U1ф |
|
|
|
|
. |
|
|
|
|
|
|
|
rc |
· |
2 |
|
|
|
||||||
§ |
|
|
|
|
|
|
|
2 |
|
||||||||
|
|
¨r |
|
|
|
2 |
¸ |
|
x xc |
|
|
|
|||||
|
|
|
|
|
|
||||||||||||
© |
1 |
|
|
|
S ¹ |
|
1 |
2 |
|
|
|
||||||
Момент асинхронного двигателя можно определить из выражения
для активной мощности цепи ротора в сопротивлении |
r2c |
: |
||||||||||||||
S |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
М Z0 3(I2c )2 |
r2c |
; М |
3(I2c )2 r2c |
. |
|
|
||||||||||
S |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
S Z0 |
|
|
|
|
|
|||
Подставим сюда значение тока I2c , найденное выше, |
||||||||||||||||
М(S) |
|
|
|
3Uл2.ф r2c |
|
|
|
. |
|
|
||||||
|
|
ª§ |
|
|
r' |
· |
2 |
|
2 |
º |
|
|
||||
|
Z |
0 |
S Ǭr |
|
|
2 |
¸ |
x |
xc |
» |
|
|
|
|
||
|
|
|
|
|
||||||||||||
|
|
¨ 1 |
|
|
S |
¸ |
|
1 |
2 |
» |
|
|
|
|
||
|
|
|
« |
|
|
¹ |
|
|
|
|
|
|
|
|||
|
|
|
© |
|
|
|
|
|
|
¼ |
|
|
|
|
||
|
|
|
¬ |
|
|
|
|
|
|
|
|
|
|
|
||
Приравнивая производную к нулю, определимэкстремальные значения М для режимов двигателя и генератора
dM (S) |
|
|
|
|
|
r' |
|
|
|
|
|
|
|
dS |
0 ; Sкр |
|
|
2 |
|
|
; xk |
|
x1 x2c . |
||||
|
r12 xk2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||
Для двигательного режима Mmax равен |
|
|
|
||||||||||
M |
|
|
|
1,5 U12ф |
|
|
; z |
|
|
|
|
r 2 |
x2' . |
max Z0 (r zmax ) |
|
|
|
|
|||||||||
|
|
max |
|
1 |
k |
||||||||
Исходя из номинального значения Mн Sн можно определить r2c, |
|||||||||||||
входящие в схему замещения |
|
|
|
|
|
|
|
|
|
||||
|
|
|
c |
|
|
|
2 |
|
2 |
|
, |
|
|
|
|
r2 |
Sн Rн |
|
|
Rн |
|
zmax |
|
|
|||
1,5U 2
где Rн r1 Z 1ф .
0M н
После деления M S на Mmax и некоторых преобразований найдем уточненное выражение
M S |
2Mmax 1 |
DSкр |
|
|
r |
||||
|
|
|
|
|
; |
D |
1 |
. |
|
S |
|
Sкр |
|
|
|||||
|
|
|
|
|
rc |
||||
|
|
|
|
|
2DSкр |
|
|
2 |
|
|
Sкр |
S |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
Приняв r1 o 0, получим приближенное значение для M (S) и Sкр.
Рекомендуемаялитература
1.ГОСТ 16593–79. Электроприводы. Термины и определения. – М.: Госкомитет СССР по стандартам, 1979.
2.ГОСТ 17154–71. Машины электрические вращающиеся. Термины
иопределения. – М.: Госкомитет СССР по стандартам, 1972.
3.Чиликин, М. Г. Общий курс электропривода: учебник для вузов / М. Г. Чиликин, А. С. Сандлер. – 6-е изд. – М.: Энергоиздат, 1981.
4.Копытов, Ю. В. Экономия электроэнергии в промышленности: справочник / Ю. В. Копытов, Е. А. Чуланов. – М.: Энергоатомиздат, 1982.
5.Сборник задач по общей электротехнике и основам электроники / под ред. В. Г. Герасимова. – М.: Высшая школа, 1987. – 288 с.
6.Бондаренко, А. В. Электротехника: учебное пособие / А. В. Бондаренко. –
СПб.: СПбГАСУ, 2004. – 342 с.
182 |
183 |

РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА № 11
Определение времени разгона и энергетического КПД асинхронного электропривода
Работа системы электродвигатель–производственный механизм связана с действием различных сил и их моментов. Одни из них приводятсистемувдвижениеиназываютсявращающими, другиетормозятее и называются силами или моментами тормозящими. Основным уравнением, описывающимхарактердвиженияэлектропривода, являетсяуравнение моментов, действующих на вал электродвигателя
Мд Мс Jd: / dt. |
(1) |
Из этого уравнения следует, что электромагнитный момент двигателя Мд уравновешиваетмоментстатическогосопротивления Мс механизма и динамическиймомент Мдин Jd: / dt , возникающий приизменении скорости инерционных масс, т. е. во время переходных режимов (пуска, останова, изменениячастотывращения). Этовремя, какправило, является потерянным для полезной работы механизма, поэтому его необходимо сокращать.
Целью настоящей работы является определение времени разгона, торможенияиэнергетическогоКПДэлектроприводанапримереиспользования асинхронного двигателя с короткозамкнутым ротором Д, которыйприводит в движение производственный механизм (ПМ), представленный на расчетной схеме (рис. 11.1) эквивалентным статическим моментом Мс и приведенным моментом инерции Jпр.
Рис. 11.1
Изуравнения(1) следует, чтоточноевремяразгона, атакжевыбега (при торможении) определяются из выражения
dt Jd: /(Мд Мс), |
(2) |
откуда после интегрирования в интервале изменения частоты от :1 до :2 получаем
t1 2 |
:2 |
|
Jd: |
|
. |
|
|
|
≥ |
|
|
|
(3) |
||||
M д |
М |
|
|
|||||
|
: |
с |
|
|
||||
|
1 |
|
|
|
|
|
0, :2 |
:н, для |
Пределы интегрирования для режима пуска :1 |
||||||||
режимаостановки(выбега) :1 |
:н, :2 |
0. Длярежимавыбега Мд 0 |
||||||
и получаем |
|
|
|
|
|
|
|
|
tвыб |
0 |
Jd: |
. |
|
|
|||
≥ |
|
|
(4) |
|||||
Мс |
|
|||||||
|
|
: |
н |
|
|
|
|
|
Впереходных режимах моменты двигателя Мд и сопротивления
Мс, азначитидинамическиймомент Мдин имеютсложнуюзависимость
отчастотывращения. Вобщемслучаеэтизависимостинелинейны. Иногда удается найти такое аналитическое выражение для этих характеристик, прикоторомуравнение (1) допускаетаналитическое решение. Вкачестве примера найдем выражение для времени переходных процессов вхолостую Мс 0 асинхронного двигателя, уравнение механической характеристики которого имеет вид
Мд |
2Мmax |
, |
|||
|
|||||
|
S |
|
Sк |
|
|
|
Sк |
S |
|||
где S – скольжение; Sк – критическое скольжение; Mmax ветствующий критическому скольжению.
Заменив |
d: |
на |
dS |
, получим в выражении (2) |
d: |
dt |
dt |
dt |
(5)
– момент, соот-
:0 dSdt , тогда
из (1) M д |
J:0 |
dS |
, так как принято, |
чтоM |
c |
0 . Подставим это |
|||||
dt |
|||||||||||
|
|
|
|
|
|
|
|
|
|||
выражение в (5) и получим |
|
|
|
|
|
|
|||||
|
|
|
|
2M max |
dS |
|
|
||||
|
|
|
|
|
|
|
J:0 |
dt . |
|
|
|
|
|
|
|
S |
|
Sк |
|
|
|||
|
|
|
|
Sк |
S |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
J:0
Разделим переменные в последнем выражении, обозначив M max
как Tм (электромеханическая постоянная), тогда
184 |
185 |
|
|
|
|
|
|
|
|
§ |
|
|
S |
|
|
Sк |
· |
|
|
J:0 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
dt |
|
¨ |
|
|
|
¸ |
|
|
dS . |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
¨ |
|
Sк |
|
|
S |
¸ |
2Mmax |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
© |
|
|
|
¹ |
|
|
|
|
|
|
|
||||||||||||
После интегрирования получим величину времени пуска |
|||||||||||||||||||||||||||||||
|
|
|
Tм |
S2 |
§ |
S |
|
|
|
· |
|
|
|
|
|
|
§ |
|
S 2 |
S |
2 |
|
|
|
· |
||||||
t |
п |
|
³ |
¨ |
|
Sк |
¸dS |
|
Tм |
¨ |
|
1 |
|
|
2 |
S |
к |
ln |
|
S1 |
¸ . |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
2 |
¨ |
Sк |
|
|
|
¸ |
|
|
|
|
2 |
¨ |
|
2Sк |
|
|
|
¸ |
||||||||||||
|
|
S1 |
© |
|
|
|
S ¹ |
|
|
|
|
© |
|
|
|
|
|
|
S2 ¹ |
||||||||||||
Если принять, что пуск заканчивается при S2 |
|
0,05 и ln 20 | 3, |
|||||||||||||||||||||||||||||
можно определить время пуска: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
§ |
|
1 |
|
|
|
|
|
|
|
· |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
п |
T |
¨ |
|
|
|
1,5S |
¸ . |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
м |
¨ |
|
|
|
|
|
|
|
|
|
к ¸ |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
©4Sк |
|
|
|
|
|
|
¹ |
|
|
|
|
|
|
|
|
|||
Небезынтересно отметить, что можно найти минимальное время пуска по выражению для нормированного времени пуска
§ |
tп |
· |
|
|
1 |
|
|
tп |
¨ |
¸ |
S |
кр |
. |
||
|
|
6 |
|||||
T ¨T |
¸ |
|
|
||||
м © м ¹min |
|
|
|
|
|||
ПоследифференцированияпоSк иприравниваниянулюустановим,
что
Мэ |
J: |
|
|
Мmax |
, |
|
tп |
|
1 |
|
1,5Sк |
||
|
|
|
|
|
||
|
|
|
4Sк |
|
||
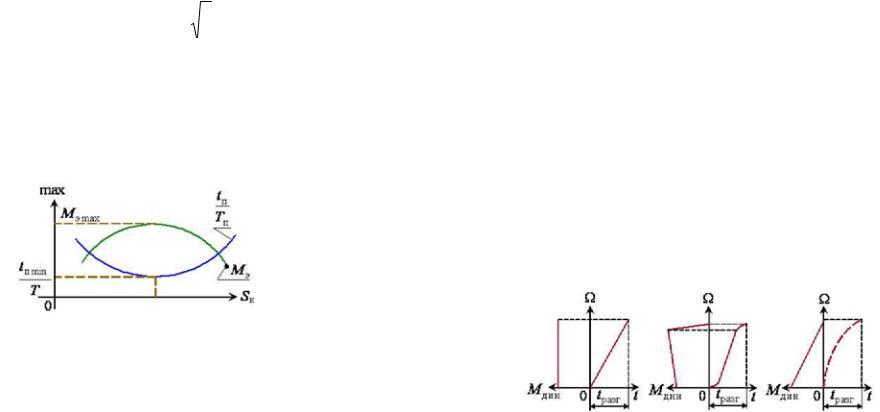
причем эффективный момент также имеет экстремальное (максималь-
í î å) çí à÷åí èå Мэmax . Оно составляет (~0,81 Мmax) (рис. 11.2).
|
Рис. 11.2 |
|
|
Сучетомстатическогомоментасопротивления Мc механизмавре- |
|||
мя пуска определяется выражением |
|
||
tп |
|
J:0 |
. |
|
M э Мс |
||
|
|
|
|
|
186 |
|
|
При торможениивремявыбега рассчитываетсяпотому же соотношению, но со знаком «+» в знаменателе:
tторм |
J:0 |
. |
M э Мс |
К сожалению, простое аналитическое решение задачи при нелинейныхзависимостяхвозможнодалеконевсегда, всвязисчемдляопределения времени пуска и останова электропривода пользуются приближенными методами графического интегрирования, например «методом площадей» [1, 2].
Суть этого метода в том, что вместо бесконечно малых приращений d: и dt вуравнения(1)–(4) можноподставитьконечныеинтервалы ':i и 'ti , разбив общий интервал интегрирования на «m» малых и конечныхинтервалов, впределахкоторыхзначениямоментов Мдин i , Мдi ,
Мсi можносчитатьпостоянными(средними). Используяграфикифунк- |
||||
ций Мд : , Мс |
: и Мдин : , на каждом интервале ':i определяем |
|||
значения Мдин |
Мдi Мci , авремя 'ti изменениянакаждоминтервале |
|||
скорости :i будет |
J':0 |
|
|
|
|
'ti |
. |
(6) |
|
|
|
|||
|
|
M динi |
|
|
Общее время переходного режима получают суммированием 'ti : |
||||
|
|
m |
|
|
|
ti |
ƒ 'ti . |
(7) |
|
|
|
i 1 |
|
|
Для режима выбега Мдин Мс и для расчета используется зави- |
||||
симость Мс(:) |
производственного механизма. Значения ':i |
можно |
||
выбирать одинаковыми или разными в зависимости от характера изменения момента. Точность конечных результатов повышается с ростом числа интервалов. Качественныйхарактеризмененияt от : дляразличных зависимостей Мдин : проиллюстрирован на рис. 11.3.
Рис. 11.3
187

Краткие методические указания к выполнению работы
Задача: рассчитать время разгона и выбега и энергетический КПД асинхронного электропривода, используя графоаналитический метод интегрирования.
Исходные данные: расчетная схема электропривода (см. рис. 11.1); зависимость момента двигателя M д и эквивалентного статического момента производственного механизма Mс от скольжения в относительныхединицах(табл. 11.1); значенияприведенногомоментаинерции Jпр, номинального момента двигателя Мд.н, номинального КПД двигателя ичастотывращенияприхолостомходеповариантамзадания(табл. 11.2).
Последовательность расчета
1. По данным табл. 11.1 и 11.2 составить табл. 11.3, учитывая, что
М д Мд / Мд.н ; Мс Мс / Мд.н ,
где Мд – момент двигателя в относительных единицах, где за базовую величину, т. е. за единицу измерения, принят номинальный момент двигателя Мд.н; Мс – статический момент в относительных единицах.
|
|
|
|
Значения S , |
М |
д |
и |
М |
с |
берутся из табл. 11.1; |
Мд, М с , |
Мдин, |
||||||||||||||||
n и : рассчитываются по соответствующим формулам: |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
M д |
|
|
|
|
д Мд.н ; |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Mc |
|
|
|
c Мд.н ; |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Mдин |
Мд Мс ; |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
n0 1 S ; |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
: |
|
|
2Σ n / 60 0,105 n . |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 11.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
S |
0 |
0,05 |
|
|
0,1 |
|
|
0,15 |
|
0,2 |
|
0,4 |
0,6 |
|
0,8 |
|
1,0 |
|
||||||||
|
|
|
|
д |
0 |
1,30 |
|
|
1,9 |
|
|
2,0 |
|
|
1,9 |
|
1,6 |
1,4 |
|
1,25 |
|
1,2 |
|
|||||
|
|
М |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
с |
1,07 |
0,97 |
|
|
0,9 |
|
|
0,85 |
|
0,8 |
|
0,65 |
0,5 |
|
0,45 |
|
0,4 |
|
||||||
|
|
М |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 11.2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ варианта |
|
Jпр, |
|
|
Мд.н, |
|
|
|
n0 , |
|
|
|
Κн, |
|
|
|||
|
|
|
кг·м |
|
|
Н·м |
|
|
об/мин |
|
|
% |
|
|
|
||||
|
1 |
0,7 |
|
|
10 |
|
|
|
1000 |
|
|
70 |
|
|
|
||||
|
2 |
1,0 |
|
|
10 |
|
|
|
1000 |
|
|
70 |
|
|
|
||||
|
3 |
2,0 |
|
|
15 |
|
|
|
1000 |
|
|
70 |
|
|
|
||||
|
4 |
2,0 |
|
|
20 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
5 |
2,5 |
|
|
25 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
6 |
3,0 |
|
|
30 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
7 |
3,5 |
|
|
35 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
8 |
4,0 |
|
|
40 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
9 |
4,5 |
|
|
45 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
10 |
5,0 |
|
|
50 |
|
|
|
1000 |
|
|
75 |
|
|
|
||||
|
11 |
5,5 |
|
|
55 |
|
|
|
1000 |
|
|
80 |
|
|
|
||||
|
12 |
6,0 |
|
|
60 |
|
|
|
1000 |
|
|
80 |
|
|
|
||||
|
13 |
7,0 |
|
|
70 |
|
|
|
1000 |
|
|
80 |
|
|
|
||||
|
14 |
0,7 |
|
|
10 |
|
|
|
1500 |
|
|
70 |
|
|
|
||||
|
15 |
1,0 |
|
|
15 |
|
|
|
1500 |
|
|
70 |
|
|
|
||||
|
16 |
1,5 |
|
|
20 |
|
|
|
1500 |
|
|
75 |
|
|
|
||||
|
17 |
2,0 |
|
|
25 |
|
|
|
1500 |
|
|
75 |
|
|
|
||||
|
18 |
2,5 |
|
|
30 |
|
|
|
1500 |
|
|
75 |
|
|
|
||||
|
19 |
2,5 |
|
|
40 |
|
|
|
1500 |
|
|
77 |
|
|
|
||||
|
20 |
3,0 |
|
|
50 |
|
|
|
1500 |
|
|
80 |
|
|
|
||||
|
21 |
3,0 |
|
|
60 |
|
|
|
1500 |
|
|
80 |
|
|
|
||||
|
22 |
3,5 |
|
|
70 |
|
|
|
1500 |
|
|
80 |
|
|
|
||||
|
23 |
4,0 |
|
|
80 |
|
|
|
1500 |
|
|
85 |
|
|
|
||||
|
24 |
4,0 |
|
|
90 |
|
|
|
1500 |
|
|
85 |
|
|
|
||||
|
25 |
4,5 |
|
|
90 |
|
|
|
1500 |
|
|
85 |
|
|
|
||||
|
26 |
5,0 |
|
|
100 |
|
|
|
1500 |
|
|
85 |
|
|
|
||||
|
27 |
5,0 |
|
|
120 |
|
|
|
1500 |
|
|
85 |
|
|
|
||||
|
28 |
5,5 |
|
|
120 |
|
|
|
1500 |
|
|
85 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 11.3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Величина |
|
|
|
|
Значениевеличины |
|
|
|
|
|
|
|
||||||
|
s |
|
0 |
0,05 |
0,1 |
|
0,15 |
0,2 |
|
0,4 |
0,6 |
|
0,8 |
|
1,0 |
|
|||
|
Мд , Н·м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М с , Н·м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мдин , Н·м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: , рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
188 |
189 |
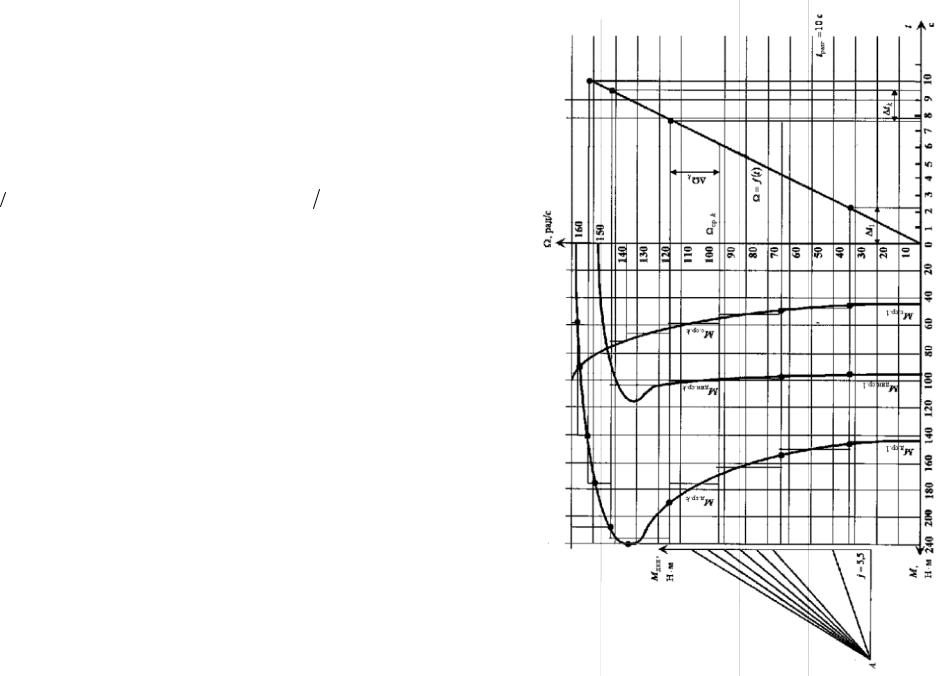
2. НалистемиллиметровкиформатомА4 строятсязависимости Mc, |
|
||||||||||||||
M д, M дин f : |
(рис. 11.4), для чего выбирают удобные масштабы |
|
|||||||||||||
|
|||||||||||||||
момента |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m >Н м/см , m: ª |
рад/с |
º . |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
м |
« |
|
|
см |
|
» |
|
|
|
|
|
|
||
|
|
¬ |
|
|
|
¼ |
|
|
|
|
|
|
|||
3. Оценивается примерно время разгона |
|
|
|
|
|
|
|
|
|||||||
|
tразг | |
Jпр:0 |
|
. |
|
|
|
|
|
|
|
|
|
||
|
Мдин.ср |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Значения Jпр и :0 берутсяизтабл. 11.2, асредниезначения Мдин. ср |
|
||||||||||||||
из графика Мдин |
f : ; выбирается удобный масштаб времени |
|
|||||||||||||
m , с см. Масштаб для момента инерции |
J |
пр |
, |
кг |
|
м |
2 |
см |
, вычисляется |
|
|||||
t |
|
|
|
|
|
|
|
|
|
|
|
||||
по формуле |
|
mм mt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mJ |
. |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
m: |
|
|
|
|
|
|
|
|
|
|
|||
Слева от графика моментов строится параллельно оси М отрезок
А0 Jпр / mу,см (см. рис. 11.4).
4.Кривые Мдин, Мд и Мс заменяются ступенчатыми ломаными линиями, причем берется 8–10 участков.
5.По вспомогательной вертикальной шкале 0 Мдин откладываются Мдин1, Мдин2 и т. д. и соединяются отрезками с точкой А. Параллельным переносомполученных отрезков строится ломаная линия :(t) дозначения : :н. Поосивремениопределяетсявремяразгонапривода
m
tпуска ¦'ti . i 1
6.Для определения времениостанова привода на следующемлисте
А4 рисуется зависимость Мс(:) в том же масштабе, что и на рис. 11.4. Строится отрезок 0А1 0А справа от точки 0 (рис. 11.5), по вспомога-
тельной шкале 0Мс откладываются величины Мс и соответственные точки соединяются отрезками с точкой А1. Параллельным переносом
отрезка строится ломаная линия :(t) для режима выбега.
Первойточкеграфика :(t) длявыбегасоответствуют : :н, пос- ледней – : 0.
7.По рис. 11.5 определяется время выбега
m
tвыбега ¦ tk . k 1
Рис. 11.4
190 |
191 |
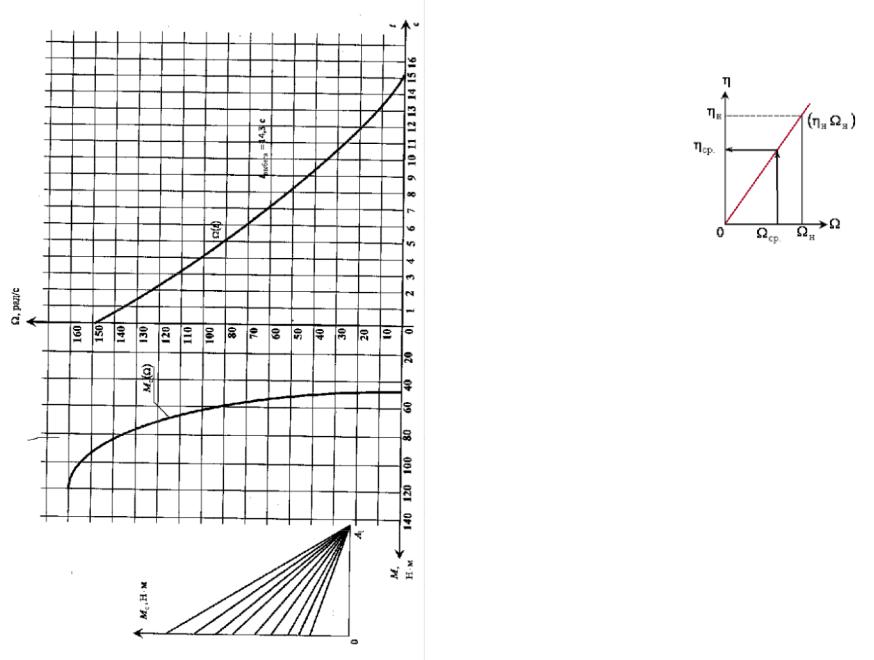
Рис. 11.5
8. ОпределяетсясреднийКПДнакаждойступени, длячегостроится вспомогательный график K f (:) (рис. 11.6).
С удовлетворительным приближением эту зависимость можно построить по двум точкам : 0 и : :н K Kн [3].
k
k
Рис. 11.6
9. Заполняется табл. 11.4, где используются данные из рис. 11.4 и 11.6. Ниже приведены расчетные формулы:
:ср.k – середина соответствующего участка ':k ;
Мд.ср.k – среднее значение каждой ступени графика Мд;
Р2 ср.k |
|
:ср.k Мд.ср.k ; |
|||
А2 ср.k |
|
Р2ср.к tk ; |
|||
tk – интервал времени, соответствующий каждому |
|||||
приращению ':k ; |
|
||||
А |
|
|
А2ср.k |
; |
|
1ср.k |
|
K |
|
|
|
|
|
|
ср.k |
|
|
Kср.k |
– берутся из графика (см. рис. 11.6) по значениям :ср.k ; |
||||
|
|
n |
|
||
А2 |
¦A2 ср.k |
; |
|||
|
k |
1 |
|
|
|
|
n |
|
|||
А1 |
¦A1ср.k . |
|
|||
|
k |
1 |
|
|
|
192 |
193 |
Вычисляется энергетический КПД Κэ А2 .
А1
Таблица 11.4
№ участка |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
:ср.k , рад/с
Мд.ср.k , Н м
Р2ср.k , Вт
А2ср.k , Дж
Κср.k
tk ,с
А1ср , Дж
Примечание. Пример графических построений, приведенных на рис. 11.4, 11.5, выполнен для варианта 28.
Рекомендуемаялитература
1. Электротехника / под ред. В. Г. Герасимова. – М.: Высшаяшкола, 1985. –
463 с.
2.Бронштейн, И. Н. Справочникпоматематикедляинженеров/ И. Н. Бронштейн, К. А. Семендяев. – М.: Наука, 1986. – 133 с.
3.Воробьев, А. В. Электротехника. Расчетно-графические работы с фрагментами инженерного анализа / А. В. Воробьев; СПбГАСУ. – СПб., 1993. – 35 с.
|
Приложение 1 |
|
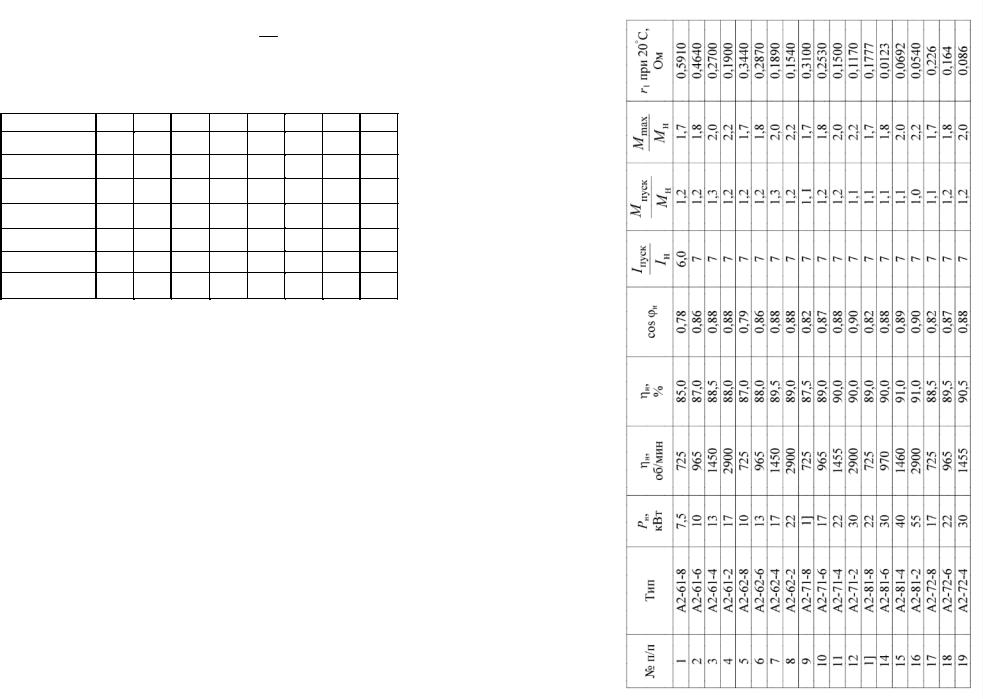
ПРИЛОЖЕНИЯ |
двигателискороткозамкнутымироторами |
А2 взащищенном исполнении |
|
асинхронные |
единойсерии |
|
Трехфазные |
|
194 |
195 |
Окончание прил. 1
196
Примечание. Номинальноенапряжениедвигателей220/380 Вчастотой50 Гц, ихноминальныережимыS1 сПВ% = = 100 %. Первая цифра в типе двигателя после серии А2 обозначает номер габарита, вторая – длины, а третья – число полюсов машины. Исполнение, защищенное в чугунном корпусе с лапами.
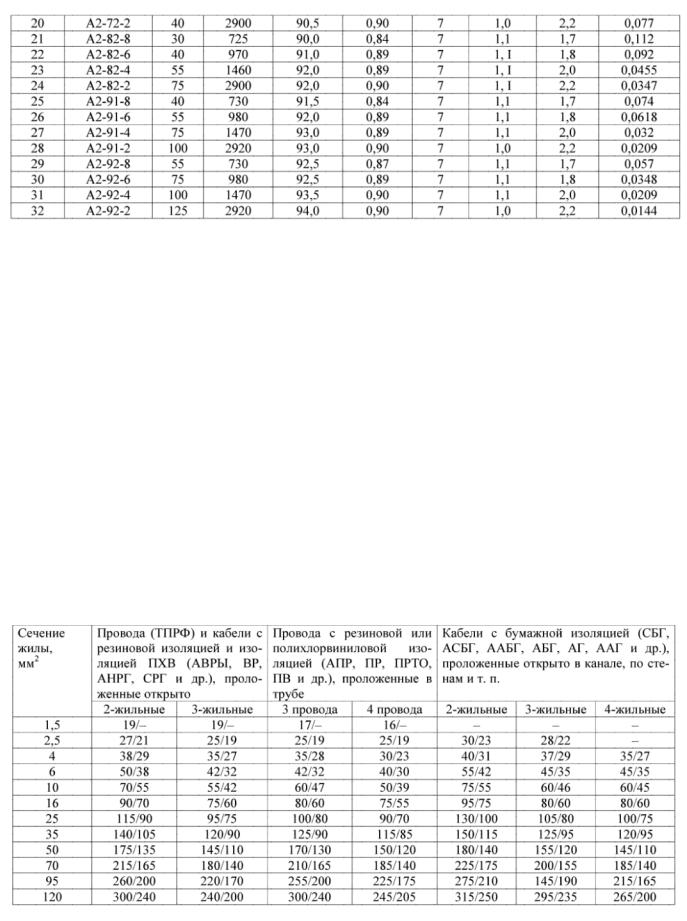
Приложение 2
Длительно допустимые нагрузки (А) на одну жилу изолированныхпроводов исиловыхкабелей смедными или алюминиевыми (взнаменателе) жиламипри прокладке в помещении итемпературе 15–25  С
С
197