

sopromat2
.pdfПосле подстановки u, v по (g) в первое из уравнений (3) получаем уравнение совместности деформаций:
l1sin(α2 + α3 ) + l2 cos(α1 + α3 ) + l3cos(α1 − α2 ) = 0. (4)
Как видно из уравнения (4), удлинения стержней не могут изменяться независимо друг от друга; если два удлинения заданы, то третье однозначно определяется уравнением (4). В этом состоит физический смысл уравнений совместности деформаций.
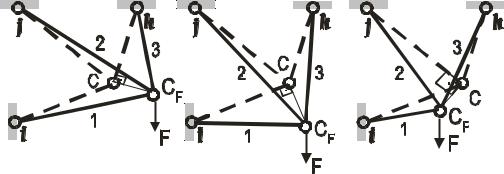
3.3. Уравнения равновесия. Рассекаем все стержни и рассматриваем равновесие узла С под действием продольных сил Nk (k = 1, 2, 3) и внешней силы F (рис.4). Направления усилий NK выбираем в соответствии с направлением удлинений lK стержней – в данном случае все усилия принимаем растягивающими.
Составим суммы проекций всех сил на оси x и y:
∑ X = 0: |
− N sin α− N |
2 |
cos α + N cos α = 0, |
||||||
|
1 |
1 |
|
2 |
3 |
3 |
(5) |
||
∑ Y = 0: |
− N cos α+ N |
|
|
sin α |
+ N sin α |
||||
2 |
= F. |
||||||||
|
1 |
1 |
|
2 |
3 |
3 |
|
||
Два уравнения равновесия (5) и уравнение совместности деформаций (4) позволяют найти все Nk (k = 1, 2, 3).
3.4. Определение усилий в стержнях. Используем закон Гука для
определения удлинений стержней: |
|
|
|
|
|
|
|
||||
|
|
|
|
lk = |
|
Nk lk |
, |
|
|
(h) |
|
|
|
|
|
|
Ek Ak |
||||||
|
|
|
|
|
|
|
|
|
|
||
где lk – удлинений стержней; lk |
, Ak – длина и площадь поперечных |
||||||||||
сечений стержней; Ek – модуль упругости. |
|
|
|
|
|||||||
|
Подставив lk по (h) |
в уравнение |
совместности деформаций |
(4) |
|||||||
преобразуем его к усилиям: |
|
|
|
|
|
|
|
|
|||
|
l1 sin(α2 + α3) |
N1 + |
l2 cos(α1 + α3) |
N2 |
+ |
l3 cos(α1 − α2 ) |
N3 = 0. |
(6) |
|||
|
|
|
|
||||||||
|
EA1 |
EA2 |
|
|
|
|
EA3 |
|
|||
После умножения всех членов (6) на EA1, подстановки значений lk , αк (k = 1, 2, 3), заданных соотношений между площадями поперечных сечений стержней А1/А2, А1/А3 и присоединения уравнений равновесия (5), приходим к системе линейных алгебраических уравнений:
151
2,864 N1 – 3,961 N2 + 1,691 N3 = 0,
– 0,986 N1 – 0,832 N2 + 0,242 N3 = 0, |
(7) |
– 0,164 N1+ 0,555 N2 + 0,970 N3 = F.
Решив систему (7), например, методом исключения неизвестных Гаусса, найдем:
N1 = – 5,9913 . 10-2 F, N2 = 0,3154 F, N3 = 0,8403 F. (8) Знак "–" у продольной силы N1 означает, что стержень 1 сжат и,
следовательно, выбранное на рис.5 направление вектора перемещений
→
CCF отличается от действительного, так как величина l1 должна быть отложена в противоположном направлении.
3.5. Проверка решения. Для проверки правильности определения усилий в стержнях составим сумму моментов сил, приложенных к узлу C на рис.4, относительно какой-либо точки плоскости xy, например, относительно точки j – точки крепления стержня с номером 2 (рис.3):
∑m(j) = F·l2·cosα2 + N1·(H1 + H2)·sinα1 – N3·l2·sin(π–(α2+α3)) = F[3,6·cos(0,588)
–5,99·10-2·(0,5 + 2)·sin(1,406) – 0,84·3,6·sin(0,588 + 1,326)] = F(2,995 –
–0,148 – 2,849) = – 0,002F.
Как видим, сумма моментов сил, приложенных к узлу C, относительно точки j – малая по сравнению с F величина, поэтому полученное решение (8) – правильное.
Для дальнейших расчетов принимаем:
|
|
|
N1 = – 5,99 . 10-2 F, N2 = 0,315 F, N3 = 0,840 F; |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9) |
|
|
|
|
N1 = – 19,17 kH, |
N2 = 100,8 kH, N3 = 268,8 kH. |
||||||||||||||||||||||
3.6. Подбор формы и размеров поперечных сечений стержней. |
||||||||||||||||||||||||||
Определяем наиболее напряженный стержень: |
|
|
|
|||||||||||||||||||||||
σ(1) = − |
5,99 |
10−2 F |
, |
σ(2) |
= |
|
0,315F |
|
A |
1 |
= |
1,2 0,315F |
= |
0,378F |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||||||
|
|
|
A1 |
A2 |
A1 |
|
|
A1 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
||||||||||||
|
|
|
|
|
|
|
|
1,2 0,84F |
|
|
|
|
|
|
|
|
|
|
|
|
|
(10) |
||||
σ(3) = |
0,84F |
|
A1 |
= |
= |
1,008F |
, |
|
σ(3) |
> σ(2) > | σ(1) |. |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
A3 |
|
A1 |
|
A1 |
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
Наиболее напряженным является 3-й стержень.
Используя условие прочности (1) и заданные соотношения площадей А2/А1, А3/А1, найдем требуемые площади поперечных сечений (м2):
152

|
|
1,008 320 103 |
|
' |
|
' |
|
2,016 10−3 |
|||
A' |
≥ |
|
|
= 2,016 10−3 ; A |
= A |
= |
|
= 168, 10−3. |
|||
160 |
106 |
2 |
3 |
1,2 |
|||||||
1 |
|
|
|
|
|
||||||
Поскольку стержень 1 оказался сжатым, для него выбираем коробчатый профиль (Приложение 6), а для растянутых стержней 2 и 3 – квадратный профиль (ГОСТ 259171).
Для 1-го стержня по Приложению 6 выбираем коробчатый профиль с высотой грани h = 100 мм, толщиной стенки s = 6 мм и площадью сечения А1 = 22,56 см2 = 2,256 . 10-3 м2.
Для 2-го и 3-го стержней по ГОСТ 259171 выбираем квадратные профили с высотой ребра h = 42 мм и площадью сечения А2 = А3 = 17,64 см2 = 1,764.10-3 м2. Соотношения площадей А2/А1 = 1/1,28 , А3/А1= 1/1,28 близки к заданным.
3.7. Проверка устойчивости сжатого стержня. Сжатым оказался первый стержень. Проверку устойчивости этого стержня производим по методике, изложенной в Задании 6.
Для 1-го стержня имеем: площадь – A1 = 22,56 см2 = 22,56 . 10-3 м2 , радиус инерции – i = 3,84 см, гибкость – λ = 2,5/ 3,84.10-2 = 65. По Приложению 10 при Ry = 240 МПа выбираем ϕ = 0,78. По условию устойчивости центрально сжатых стержней:
σ(1) = 19, 17 10−33 = 8,5 МПа < ϕ σadm = 125 МПа.
22,56 10
Устойчивость 1-го стержня обеспечена.
4. Расчеты по предельным нагрузкам.
4.1. Предельная нагрузка. Определение размеров поперечных сечений стержней по предельным нагрузкам производят исходя из распределений усилий в предельном деформированном состоянии системы.
В рассматриваемом примере предельные деформированные состояния шарнирно-стержневой системы на рис.3 могут возникнуть при пропорциональном увеличении напряжений до предела текучести, когда усилия в двух из трех стержней станут предельными, и конструкция превратится в пластический механизм.
При этом рост напряжений в стержнях может происходить либо за счет увеличения нагрузки на конструкцию при фиксированных площадях поперечных сечений стержней, либо за счет уменьшения этих площадей при фиксированной нагрузке на конструкцию.
Предельные значения усилий определяются формулами:
N(1) |
|
~ |
N(2) |
~ |
|
, |
N(3) |
|
~ |
, |
= σA , |
= σA |
2 |
= σA |
|||||||
lim |
y |
1 |
lim |
y |
|
lim |
y |
3 |
|
|
153

~ |
~ |
|
~ |
|
где σy – предел текучести материала стержней; A1, |
A2 |
, |
A3 |
– искомые |
предельные значения площадей поперечных сечений стержней 1, 2, 3 соответственно.
~ ~ ~ ~
Форму поперечных сечений и соотношения A2/A1, A3/A1оставляем
такими же, как в упругом расчете.
Действующая на конструкцию внешняя сила F должна быть принята в качестве допускаемой Padm = F = 320 kH, тогда предельная нагрузка
Plim = nу Padm = 1,5 . 320 = 480 kH,
где ny – коэффициент запаса по пределу текучести.
4.2. Способ последовательных догружений. Будем увеличивать напряжения σ(1), σ(2), σ(3) в стержнях за счет уменьшения площадей поперечных сечений А1, А2, А3, найденных в п.3.6, при фиксированной внешней силе F.
Согласно расчету в п.3, усилия в стержнях определены соотношениями (9), а наиболее напряженным является 3-й стержень.
При пропорциональном уменьшении площадей Ак, к = 1, 2, 3, напряжения в 3-м стержне достигнут предельного значения σу раньше, чем в 1-м и 2-м. В этот момент внешняя сила F станет равной Plim, а распределение напряжений в стержнях будет:
|
|
|
|
5,99 10 |
−2 |
|
|
|
|
|
|
|
|
|
|
(1) |
~ |
|
|
|
|
|
Plim |
|
||||
|
|
(1) |
|
|
(1) |
|
|
|
|
|
|
|
−2 |
Plim |
|
A3 |
|
|
|
−2 |
|
|||||||
|
σ |
0 |
= − |
|
~ |
|
|
|
Plim = −5,99 10 |
|
~ |
|
~ |
= −4,99 |
10 |
|
~ |
, |
||||||||||
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
A3 |
|
A1 |
|
|
|
|
A3 |
(11) |
|||
|
|
|
|
|
|
P(1) |
|
|
|
|
|
P(1) |
|
|
|
|
|
|
|
|
P(1) |
|
|
|
||||
|
|
(2) |
|
|
|
|
|
|
|
|
(3) |
|
|
= 0,840 |
|
|
|
|
||||||||||
|
σ0 |
= 0,315 |
|
lim |
= 0,315 |
|
|
lim |
|
,σ0 = σ y |
lim |
|
|
|
|
|||||||||||||
|
|
~ |
|
|
~ |
|
~ |
. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
A2 |
|
|
|
|
|
A3 |
|
|
|
|
|
|
|
|
A3 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
~ |
из первых двух – |
||||||
|
Из последнего соотношения (11) найдем Plim |
/A3 , |
||||||||||||||||||||||||||
σ(1) |
, σ(2): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Plim(1) |
|
|
σy |
|
|
|
240 106 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
~ |
= |
|
|
|
= |
|
|
|
|
|
= 285,7MПа, |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
A3 |
|
|
0,840 |
|
|
|
|
|
0,840 |
|
|
|
|
|
|
|
|
|
|
|||||
σ(10 ) = – 4,99 . 10-2 . 285,7 = – 14,26 МПа,
σ0(2) = 0,315 . 285,7 = 90 МПа.
При дальнейшем уменьшении площадей Ак третий стержень не будет оказывать сопротивления деформациям конструкции и может быть удален из нее.
154

Уменьшим еще Ак таким образом, чтобы напряжения во 2-м стержне достигли предельного значения σy . Приращение напряжений во 2-м
стержне определяется так:
(2) |
(2) |
|
|
|
|
|
Δσ = σy |
− σ0 |
= 240 |
− 90 = 150 МПа. |
|
||
Приращениям напряжений |
(2) |
и Δσ |
(1) |
во 2-м и |
1-м стержнях |
|
Δσ |
|
|||||
соответствует приращение |
нагрузки |
P1 |
на систему |
по рис.3 с |
||
выключенным 3-м стержнем, а уравнения равновесия получаются из (5) при Δσ(3) = 0:
|
σ A |
1 |
− 0, 832 ΔσA |
2 = 0; |
− 0, 986 |
||||
|
(1) ~ |
|
(2) ~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
+ 0, 555 |
|
|
~ |
|
= |
P . |
|
|
|
(12) |
|
|||||||||||
|
|
|
|
|
|
− 0,164 |
|
σ(1) A |
1 |
σ(2) A |
2 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
~ |
|
|
придем к системе уравнений |
|
|
|||||||||||||||||||||||
Разделив (12) на A2 |
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
− 0,832Δσ |
(2) |
= 0; |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
− 11832,Δσ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
+ 0,555Δσ |
(2) |
= |
P |
~ |
|
|
. |
(13) |
||||||||||||
|
|
|
|
|
|
− 0,1968Δσ |
|
|
|
|
|
|
/ A |
2 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||
Решив (13) относительно Δσ |
(1) |
и |
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
P1 / A2 , получим: |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
Δσ |
(1) |
= – 105,5 МПа, |
|
|
|
|
|
|
~ |
= 104,0 МПа. |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
P1 / A2 |
|
|||||||||||||||||||||||||
Поскольку |
|
|
|
|
|
(1) |
+ P1 , то разделив это выражение на |
~ |
||||||||||||||||||||||||||||
|
Plim = Plim |
A2 и |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
используя заданное соотношение между площадями Ak , к = 1, 2, 3, |
||||||||||||||||||||||||||||||||||||
найдем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Plim |
|
|
|
(1) |
|
|
ΔP1 |
|
|
(1) |
|
|
|
ΔP1 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
= |
Plim |
|
+ |
|
= |
Plim |
|
A3 |
+ |
. |
|
(14) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
~ |
|
|
~ |
|
|
|
~ |
|
~ |
|
|
~ |
|
~ |
|
||||||||||||
|
|
|
|
|
|
|
|
|
A2 |
|
|
A2 |
|
|
|
A2 |
|
A3 |
|
A2 |
|
|
|
A2 |
|
|
|
|
||||||||
Правая часть (14) и Рlim известны: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Plim(1) |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A3 |
+ |
P1 |
= 285,7 +104,0 = 389,7 ; |
P |
|
|
= 480 кН. |
|
|
|
|
|||||||||||||||||||||||
~ |
~ |
~ |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lim |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
A2 |
|
A2 |
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
480 103 |
|
= 123, 10 |
−3 |
|
2 |
|
|
|
|
|
|
|
|||||||||||||
Определяем |
|
A2 = |
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
. |
|
|
|
|
|
|
|||||||||||||
|
389,7 106 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
155
|
Из соотношения площадей |
~ |
~ |
= 1/ 1,2; |
~ |
~ |
~ |
и |
||||||||||||
|
A2 |
/ A1 |
A3 |
= A2 |
находим A1 |
|||||||||||||||
~ ~ |
= 1,2 |
. ~ |
= 1,48 |
. |
10 |
-3 |
2 |
, |
~ |
= 1,23 |
. |
10 |
-3 |
2 |
. |
|
|
|
||
A3 |
: A1 |
A2 |
|
|
м |
A3 |
|
|
м |
|
|
|
||||||||
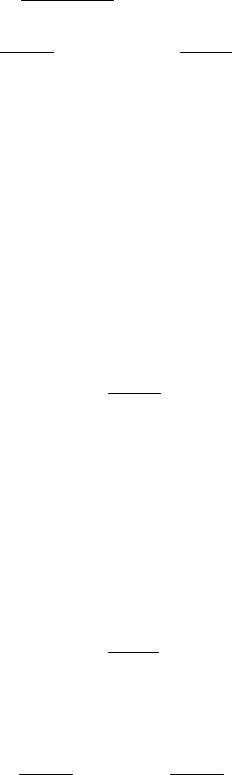
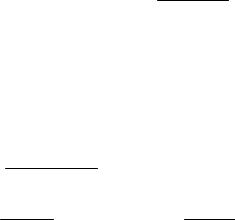
4.3. Кинематический способ. Конструкция на рис.3 может потерять кинематическую неизменяемость в соответствии со схемами предельных деформированных состояний, представленными на рис.6, когда в двух из трех стержней при пропорциональном уменьшении площадей Ак (к = 1, 2, 3) усилия достигнут предельных значений (стержни "потекут"), и конструкция превратится в пластический механизм.
а) б) в)
Рис.6. Схемы предельных деформированных состояний.
При построении схем предельных деформированных состояний конструкции учтено, что упругие деформации (удлинения или укорочения) стержня, усилие в котором меньше предельного значения, пренебрежимо малы по сравнению с деформациями тех 2-х стержней, в которых усилия достигли предельных значений, и упругими деформациями в них можно пренебречь по сравнению с пластическими. При этом условии перемещения узла С будут происходить за счет поворота упруго деформирующегося стержня вокруг своего неподвижного шарнира таким образом, чтобы точка приложения внешней силы F опускалась вниз, и сила F производила бы положительную работу.
Недеформированное состояние конструкции на рис.6 обозначено
пунктирными линиями, деформированное – сплошными. |
При |
составле- |
нии уравнений равновесия приращениями Δα углов |
αк |
вследствие |
k |
|
|
поворотов стержней пренебрегаем, поскольку они малы по сравнению с
самими углами, т.е. принимаем α + Δα≈ α , к = 1, 2, 3. k k k
Схема а. "Текут" стержни 1 и 2, стержень 3, не изменяя своей длины, поворачивается вокруг шарнира k:
σ(1) = σ(2) = σу, σ(3) < σy. |
(15) |
Уравнения предельного равновесия конструкции:
156

∑X = 0 :
∑Y = 0 :
~ |
|
|
~ |
|
(3) |
~ |
− σA |
sinα− σA cosα |
+ σ |
A |
|||
y |
1 |
1 |
y 2 |
2 |
|
3 |
~ |
|
|
~ |
|
(3) |
~ |
− σA |
cosα+ σA sinα |
+ σ |
A |
|||
y |
1 |
1 |
y 2 |
2 |
|
3 |
cosα3 |
= 0; |
|
(16) |
sinα3 = Plim.
Из 1-го уравнения (16), учитывая соотношения между площадями поперечных сечений стержней, находим:
σ(3) = |
σy (1,2sinα1 |
+ cosα2 ) |
= |
240 106(1,2 0,986 + 0,832) |
= 1998МПа. |
|
cosα3 |
0,242 |
|||||
|
|
|
||||
Поскольку σ(3) > σy , что противоречит принятому распределению усилий в стержнях, схема а) исключается из рассмотрения.
Схема б. "Текут" стержни 2 и 3, стержень 1, не изменяя своей длины, поворачивается вокруг шарнира i:
|
|
|
|
|
σ(1) |
< |
σy , σ(2) = |
σу, σ(3) = σy . |
(17) |
|||
Уравнения предельного равновесия конструкции: |
|
|||||||||||
|
~ |
|
sinα |
~ |
|
cosα |
~ |
|
cosα = 0, |
|
||
− σ(1) A |
1 |
− σA |
2 |
+ σA |
3 |
|
||||||
|
|
1 |
y |
|
2 |
y |
3 |
|
(18) |
|||
|
~ |
|
|
~ |
|
|
|
~ |
|
|
= Plim . |
|
− σ(1) A1cosα1 + σy A2sinα2 |
+ σy A3sinα3 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Из 1-го уравнения системы (18) находим σ(1) = – 105,8 МПа. Поскольку σ(1) < σy , схема б) возможна.
~
Из 2-го уравнения системы (18) при Рlim = 480 кН находим A1=
1,47 . 10-3 м2, а по соотношениям между площадями поперечных сечений
~ |
~ |
= 1,23 10 |
−3 |
2 |
. |
A2 |
= A3 |
|
м |
Схема в. "Текут" стержни 1 и 3, стержень 2 не изменяя своей длины, поворачивается вокруг шарнира j:
|
|
|
|
|
σ(1) = σy , σ(2) |
< σу, σ(3) = σy . |
(19) |
|||
Уравнения предельного равновесия конструкции: |
|
|||||||||
|
~ |
|
|
~ |
cos α |
~ |
|
cos α = 0, |
|
|
− σA |
1 |
sinα− σ(2) A |
+ σA |
3 |
|
|||||
|
y |
1 |
2 |
2 |
y |
3 |
(20) |
|||
|
~ |
|
|
~ |
2sinα2 |
~ |
|
|
= Plim . |
|
− σy A1cos α1 |
+ σ(2) A |
+ σy A3sinα3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
157
Из 1-го уравнения системы (20) находим:
(2) |
|
σy (cos α3 −1,2sinα1 ) |
|
240 10 |
6 (0,242 − 0,986 1,2) |
|
|
|||||
σ |
= |
|
|
|
|
|
= |
|
|
|
= − 272 |
МПа. |
cos α2 |
|
|
0,832 |
|||||||||
|
|
|
|
|
|
|
||||||
Поскольку |
|
σ (2) |
|
> σ y , |
что |
противоречит принятому распределению |
||||||
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
усилий в стержнях, схема в) исключается из рассмотрения.
Таким образом, кинематический способ приводит к тому же результату, что и способ догружений:
~ |
= 1,47 10 |
−3 |
м |
2 |
~ |
= A3 = 1,23 10 |
−3 |
м |
2 |
. |
A1 |
|
|
, A2 |
|
|
4.4. Статический способ. Рассматриваемая конструкция (рис.3) один раз статически неопределимая, поэтому потеря ею несущей способности произойдет, если при пропорциональном уменьшении площадей поперечных сечений в двух из трех стержней напряжения достигнут предела текучести, а третий стержень будет работать в упругой стадии деформирования. Это напряженное состояние следует считать предельным.
Для отыскания предельного напряженного состояния конструкции исследуются все возможные схемы одновременного достижения напряжениями в двух из трех стержней пределов текучести путем добавления к упругому напряженному состоянию, определенному формулами (10):
σ(1) = − |
5,99 |
10−2 F |
, σ ( |
2) |
= |
0,378F |
, |
σ(3) |
= |
1008,F |
, |
(21) |
||
|
|
|
|
|
|
|
||||||||
0 |
|
A1 |
0 |
|
|
A1 |
|
0 |
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
дополнительных напряжений, удовлетворяющих уравнениям равновесия
(5) при некотором значении внешней силы F.
Таким путем полученные предельные состояния являются статически допустимыми и должны удовлетворять уравнениям равновесия конструкции. Из статически допустимых выберем те состояния, в которых напряжения достигают пределов текучести не более, чем в 2-х стержнях. Эти напряженные состояния являются безопасными статически допустимыми. Из числа последних остановимся на том безопасном состоянии, которому соответствует предельная нагрузка Plim = 480 kH.
Для определения дополнительных напряжений |
σ (1), |
σ (2), |
σ (3),используем 1-е уравнение системы (5): |
|
|
− Δσ |
(1) |
A1 sinα1 − Δσ |
A2 cosα2 + Δσ |
(3) |
A3 cosα3 = 0. |
(22) |
|
~ |
(2) ~ |
~ |
|
Схема а. "Текут" 1-ый и 2-ой стержни:
158
|
|
Δσ(1) = −σy − σ0(1) = −σy + |
5,99 |
10−2 F |
, |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Δσ(2) = σy − σ0(2) = σy |
− |
0,378F |
|
Δσa(3) |
|
< σy − |
1,008F |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
~ |
|
, |
|
~ |
. |
|
(23) |
||||||||||||||
|
|
|
|
|
|
Δσ |
(2) |
|
|
|
A1 |
|
|
|
|
|
|
|
A1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Подставив |
|
(1) |
из (23) в (22), получим: |
|
|
|
|||||||||||||||||
|
|
Δσ, |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
~ |
|
|
|
|
|
5,99 10−2 F |
|
|
|
|
|
|
|
0,378F |
A |
|
|
|
(3) A |
|
||||||||
|
σ − |
|
|
|
A sinα− |
|
σ |
|
− |
|
|
|
|
1 |
cosα |
+ Δσ |
|
1 |
cosα = 0 |
||||||
~ |
|
|
~ |
|
|
|
|||||||||||||||||||
y |
1 |
1 |
|
y |
|
|
|
|
|
|
2 |
a |
1,2 |
3 |
|||||||||||
|
|
|
A |
|
|
|
|
|
|
A |
|
1,2 |
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5,99 10−2 F |
|
|
0,262F |
(3) |
||
0,986σ |
− |
|
− 0,693σ |
+ |
|
+ 0,202Δσ |
= 0. |
|
~ |
~ |
|||||||
y |
|
y |
|
a |
|
|||
|
|
A1 |
|
|
A1 |
|
|
|
Из последнего уравнения находим
|
|
|
|
Δσa(3) = −1145,σу − |
0,846F |
||
|
|
|
|
~ |
. |
||
|
|
|
|
~ |
|
A1 |
|
Поскольку |
|
(3) |
|
, что противоречит третьему условию |
|||
|
|
||||||
|
Δσa |
|
> σy − F / A1 |
||||
(23), схема "а" дает опасное напряженное состояние и из рассмотрения исключается.
Схема b. "Текут" 2-й и 3-й стержни:
|
|
(1) |
|
|
(1) |
|
5,99 10−2F |
|
|
(2) |
|
|
|
0,378F |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Δσ |
|
< σ |
+ σ |
= σ − |
|
, |
Δσ |
|
= σ |
|
− |
|
, |
|
|
|
|
~ |
|
y |
~ |
||||||||||
|
|
b |
|
y |
0 |
|
y |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
A1 |
|
1,008F |
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Δσ(3) = σy |
− σ0(3) = σy − |
|
|
|
(24) |
||||||
|
|
|
|
|
~ |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
Подставив |
Δσ(2) , |
Δσ(3) |
из (24) в (22), получим: |
|
|
|||||||||||
(1) |
|
0,262F |
|
0,203F |
|
−0,986σb |
−0,693σy + |
~ |
+ 0,202σy − |
~ |
= 0. |
|
|
A1 |
|
A1 |
|
|
|
|
(1) |
|
|
Из последнего уравнения находим Δσ : |
|
|
|||
|
|
|
b |
|
|
159
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
= −0,498σy + |
5,99 10−2 F |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σb |
|
|
|
~ |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку |
|
|
|
|
(1) |
|
< σ − 5,99 10 |
−2 |
|
~ |
|
, |
|
|
что |
|
|
|
соответствует |
первому |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
Δσ |
|
|
F/A |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
y |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
условию (24), схема "b" является безопасной. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
Схема с. "Текут" 1-й и 3-й стержни: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
Δσ(1) = −σy + |
5,99 |
10−2 F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
~ |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δσc(2) |
|
< σy |
− |
|
0,378F |
Δσ(3) = σy − |
1,008F |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
~ |
|
|
|
, |
|
|
~ |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
(25) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Подставив |
|
|
|
(1) |
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Δσ , |
Δσ из (25) в (22), получим: |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
5,99 10−2F |
|
~ |
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
~ |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
(2) A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|||||||||||||||||
|
σ − |
|
|
|
|
|
|
|
A sinα− |
Δσ |
|
|
1 |
cosα |
+ |
|
σ |
− |
|
|
|
|
|
1 |
cosα = 0, |
|||||||||||||||||||||
|
|
|
~ |
|
|
|
|
|
~ |
|
|
|
||||||||||||||||||||||||||||||||||
y |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
c |
1,2 |
|
|
|
|
2 |
|
|
y |
|
|
|
|
|
|
3 |
|
||||||||||||||||
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
1,2 |
|
|
||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||
|
|
|
|
|
5,91 10−2F |
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
0,202F |
|
|
|
|
|
|
|
|||||||||||||||||
0,986σ |
− |
|
|
|
|
|
|
|
− 0,693Δσ |
|
|
+ 0,202σ − |
|
|
|
|
|
|
|
|
|
= 0. |
|
|
|
|
||||||||||||||||||||
~ |
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
|
A1 |
|
|
|
|
|
|
|
||||||||
|
|
Из последнего уравнения находим Δσc |
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
0,30F |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δσ |
=1,71σ |
|
− |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
~ |
|
|
|
||||
|
|
Поскольку |
|
полученное |
|
значение |
|
|
|
|
(2) |
> σ |
|
|
, |
что |
противо- |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
Δσ |
− F/A |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
y |
|
|
1 |
|
|
|
|||
речит |
|
второму |
|
условию |
(25), схема "с" дает опасное напряженное |
|||||||||||||||||||||||||||||||||||||||||
состояние и из рассмотрения исключается. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Таким образом, предельное напряженное состояние конструкции на рис.3 возникает, если "текут" 2-й и 3-й стержни, т.е. если выполнено
условие σ(1) < σy, σ(2) = σy, |
σ(3) = σy. |
Подставив значения |
σ(2) = σy, σ(3) = σy в уравнения равновесия |
конструкции, придем к системе (18), решение которой получено в п.4.3:
σ |
(1) |
~ |
= 1,47 10 |
−3 |
м |
2 |
, |
~ |
= 1,23 10 |
−3 |
м |
2 |
. |
|
= – 105,8 МПа, A1 |
|
|
A2 |
|
|
Статический способ приводит к результату, полученному ранее двумя другими способами.
4.5. Подбор формы и размеров поперечных сечений.
160