

Lin_Alg-BE
.pdfDecember 6, 2011 Курбатов В.Г. |
|
30 |
b |
|
|
a• |
a• |
|
• • •• |
• • |
•• |
c=a+b |
c=a+b |
|
••
b
Рис. 1: Слева: правило треугольника. Справа: правило параллелограмма.
•• •• •
a+b+c
c•
••
b
••
a
Рис. 2: Правило замкнутой цепочки векторов.
3.2 Числовая проекция вектора
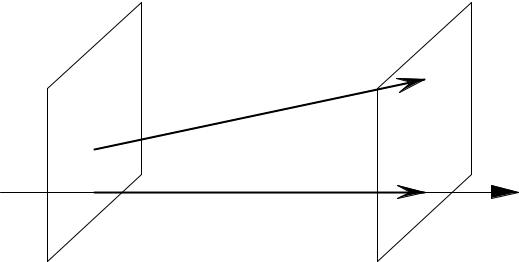
Рассмотрим в пространстве точку A и прямую L. Проведем через точку A плоскость ®, ортогональную прямой L. Точку A1 пересечения ® è L называют проекцией
точки A на прямую L.
¡!
Рассмотрим в пространстве произвольный вектор a¯ = AB. Пусть точки A1 è
¡¡¡!
B1 являются проекциями точек A è B, соответственно. В этом случае вектор A1B1
¡!
называют (векторной) проекцией вектора AB на прямую L и обозначают символом
¡¡¡ïð !
L a¯.
December 6, 2011 Курбатов В.Г. |
31 |
B
A
L
B1
A1
Рис. 3: Проекция вектора на ось
December 6, 2011 |
Курбатов В.Г. |
|
|
|
|
|
|
|
|
|
|
|
32 |
||||
Зададим на прямой L направление (и масштаб). Прямую с направлением назы- |
|||||||||||||||||
âàþò îñüþ. |
|
|
|
|
|
a¯ = |
¡! |
|
|
|
L ¯ = |
|
L |
¡! |
|
|
|
Числовой проекцией вектора |
|
|
|
ïð |
|
|
|
||||||||||
|
AB называют число пр |
a |
|
AB, равное |
|||||||||||||
|
|
¡¡¡! |
|
|
¡¡¡! |
|
|
|
|
¡¡¡! |
|
||||||
длине проекции |
j |
A |
B |
|
, если направления L è A |
B |
1 |
совпадают, и равное |
A |
B |
1j |
, åñ- |
|||||
|
1 |
|
1j |
|
1 |
|
|
|
|
|
¡j 1 |
|
|
||||
ли их направления противоположны. Очевидно, равные векторы имеют одинаковые |
|
числовые проекции. |
|
Теорема 10. Числовые проекции обладают следующими свойствами: |
|
¯ |
¯ |
1) ïðL(¯a + b) = ïðL a¯ + ïðL b; 2) ïðL(¸a¯) = ¸ ïðL a¯.
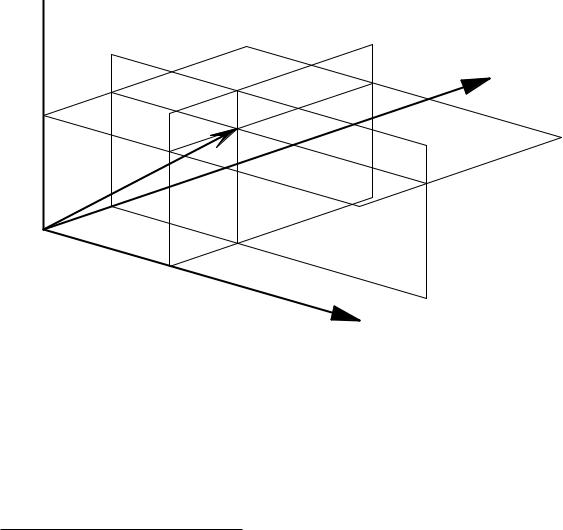
3.3 Декартова система координат
Декартовой1) (прямоугольной) системой координат в пространстве называют систему, состоящую из начальной точки O, трех взаимно ортогональных осей X,
Y è Z, проходящих через точку O, и единичного отрезка, являющегося эталоном измерения. Аналогично определяется декартова система координат на плоскости.
 Z
Z
Y
A
z
y
x
X
Рис. 4: Нахождение координат точки A в декартовой системе координат.
Координатами вектора a¯ относительно декартовой системы координат называют числовые проекции x, y è z вектора a¯ íà îñè X, Y è Z соответственно. x называют
абсциссой, y ординатой и z аппликатой.
¡!
Рассмотрим в пространстве произвольную точку A (см. рис. 4). Вектор a¯ = OA
называют радиус-вектором точки A. Координатами точки A называют координаты
¡!
радиус-вектора OA.
1)Декарт знаменит, например, своим высказыванием: Я мыслю, значит, я существую .

December 6, 2011 Курбатов В.Г. |
33 |
Координаты вектора принято записывать через знак равенства, а координаты точки около точки: a¯ = (x; y; z), A(x; y; z).
Теорема 11. Пусть a¯ = (a1; a2; a3) |
è ¯ |
; b2; b3). Тогда |
b = (b1 |
¯
(a) a¯ + b = (a1 + b1; a2 + b2; a3 + b3);
(b) ¸a¯ = (¸a1; ¸a2; ¸a3).
Доказательство. Вытекает из теоремы 10. Докажем, к примеру (a). Пусть c¯ =
¯ |
¯ |
¯ |
+b1. Аналогично yc = a2 |
+b2 |
||
a¯+b. Имеем xc = ïðX c¯ = ïðX (¯a+b) = ïðX a¯+ïðX b = a1 |
||||||
è zc = a3 + b3. |
|
|
|
|
|
|
Замечание 3. Геометрически очевидно, что векторы a¯ = (a1; a2; a3) |
è ¯ |
; b2 |
; b3) |
|||
b = (b1 |
||||||
¯
параллельны (коллинеарны), если для некоторого ¸ выполняется равенство a¯ = ¸b. Или в координатной форме:
(a1; a2; a3) = (¸b1; ¸b2; ¸b3):
Для существования такого ¸ необходимо и достаточно, чтобы совпали три числа:
|
a1 |
= |
a2 |
= |
a3 |
: |
|
b1 |
|
|
|||||
|
|
b2 |
|
b3 |
|||
Это равенство называют условием параллельности векторов. |
|||||||
Задача 13. Являются ли векторы a¯ = (2; 1; 3) |
è ¯ |
||||||
|
b = (¡3; 3; 1) параллельными? |
||||||
Решение. В силу замечания 3 для параллельности векторов должны выполняться |
||||||
равенства |
2 |
1 |
3 |
|
||
|
|
|||||
|
|
= |
|
= |
|
: |
|
¡3 |
3 |
1 |
|||
Видно, что это не так. Следовательно, векторы a¯ |
è ¯ |
|||||
b не являются коллинеарными. |
||||||
Ортами или базисными векторами, соответствующими данной декартовой систе- |
|||||||||||
ме координат, называют единичные векторы ¯, ¯ è ¯, имеющие те же направления, |
|||||||||||
что и оси координат |
|
, |
|
è |
|
|
i |
j |
|
k |
, ¯ |
|
|
|
, соответственно. Очевидно, что ¯ |
||||||||
è ¯ |
X |
|
Y |
|
Z |
|
|
|
|
i = (1; 0; 0) |
j = (0; 1; 0) |
|
|
|
|
|
|
|
|
|
|
|
|
k = (0; 0; 1). |
|
|
|
|
|
|
|
|
|
|
|
Теорема 12. Любой вектор a¯ = (x; y; z) можно представить в виде суммы |
|||||||||||
|
|
|
|
|
|
¯ |
¯ |
¯ |
|
|
(3.1) |
|
|
|
|
|
|
a¯ = xi + yj + zk: |
|
|
|
||
Эту формулу называют разложением вектора |
|
по базисным векторам ¯, ¯, ¯. |
|||||||||
|
|
|
|
|
|
|
|
|
a¯ |
|
i j k |
Доказательство. Действительно, ¯ |
¯ |
¯ |
|
|
|
||||||
|
|
|
|
|
|
xi + yj + zk = x(1; 0; 0) + y(0; 1; 0) + z(0; 0; 1) = |
|||||
(x; 0; 0) + (0; y; 0) + (0; 0; z) = (x; y; z) = a¯.

December 6, 2011 Курбатов В.Г. |
34 |
3.4 Скалярное произведение |
|
Скалярным произведением двух векторов a¯ |
è ¯ |
b называют число, равное произве- |
дению длин векторов на косинус угла между ними. Скалярное произведение векторов |
||||||
a¯ |
è ¯ |
¯ |
|
¯ |
|
|
b обозначают символом a¯ ¢ b èëè ha;¯ bi. Таким образом, |
|
|||||
|
|
|
¯ |
¯ |
|
|
|
|
|
ha;¯ bi = ja¯j ¢ jbj cos !: |
|
|
|
|
|
|
|
¯ |
¯ |
|
Замечание 4. Учитывая, что пр¯b a¯ = ja¯j cos ! è ïða¯ b = jbj cos !, скалярное произ- |
||||||
ведение можно также определить, используя проекции. А именно, |
||||||
|
|
¯ |
¯ ¯ |
|
(3.2) |
|
|
|
ha;¯ bi = ja¯j ïða¯ b = jbj ïð¯b a:¯ |
||||
Перечислим основные свойства скалярного произведения.
¯¯
~ha;¯ bi = hb; a¯i,
¯¯
~ha;¯ b + c¯i = ha;¯ bi + ha;¯ c¯i,
¯¯ ¯
~ha;¯ ¸bi = h¸a;¯ bi = ¸ha;¯ bi.
è¯ ¯
~Если векторы a¯ b ненулевые, то ha;¯ bi = 0 тогда и только тогда, когда векторы
è ¯
a¯ b ортогональны.
è ¯
Напомним, что векторы a¯ b называют ортогональными, если угол между ними равен ¼=2.
3.5Выражение скалярного произведения через координаты
Лемма 13. Для всевозможных скалярных произведений базисных векторов ¯, ¯ |
è ¯ |
||||||||||
имеем ¯ ¯ ¯ ¯ |
¯ ¯ |
è ¯ ¯ ¯ ¯ |
¯ ¯ |
|
|
|
|
i j |
k |
||
|
. |
|
|
|
|
||||||
i ¢ i = j ¢ j = k ¢ k = 1 |
|
i ¢ j = i ¢ k = j ¢ k = 0 |
|
|
|
è ¯ |
|
||||
Теорема 14. Скалярное произведение двух векторов a¯ = (a1; a2; a3) |
; b3) |
||||||||||
b = (b1; b2 |
|||||||||||
может быть вычислено по формуле |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¯ |
+ a2b2 |
+ a3b3: |
|
|
|
|
||
|
|
|
ha;¯ bi = a1b1 |
|
|
|
|
||||
Задача 14. Найти скалярное произведение векторов a¯ = (1; 2; ¡3) |
è ¯ |
|
|
||||||||
b = (0; 1; 2). |
|
||||||||||
¯
Решение. В силу теоремы 14 имеем ha;¯ bi = 1 ¢ 0 + 2 ¢ 1 + (¡3) ¢ 2 = 2 ¡ 6 = ¡4.
Следствие 15. Длина вектора a¯ = (a1; a2; a3) может быть вычислена по формуле
q
ja¯j = a21 + a22 + a23:
Задача 15. Найти длину ja¯j вектора a¯ = (2; ¡2; 1).
Решение. В силу следствия 15 длина ja¯j вектора a¯ = (2; ¡2; 1) равна p4 + 4 + 1 =
p9 = 3.

December 6, 2011 Курбатов В.Г. |
35 |
¯ |
, ¯ |
Задача 16. Найти длину вектора 3¯a ¡ 2b, ãäå a¯ = (1; 2; 3) |
b = (4; ¡5; 0). |
¯
Решение. Сначала найдем координаты вектора 3¯a ¡ 2b:
¯
3¯a ¡ 2b =3 ¢ (1; 2; 3) ¡ 2 ¢ (4; ¡5; 0) = (3; 6; 9) ¡ (8; ¡10; 0) =(3 ¡ 8; 6 + 10; 9 ¡ 0) = (¡5; 16; 9):
Теперь найдем длину этого вектора в соответствии со следствием 15:
j ¡ j |
q |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
2 |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
¯ |
|
|
|
|
2 |
|
+ a |
2 |
2 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
3¯a 2b = a |
|
|
|
+ a3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
=p |
|
|
|
|
|
|
|
|
|
|
= p |
|
|
|
|
|
|
|
|
=a¯p |
|
|
¼ 19: |
|
|
|
|||||||||||||||||
|
|
(¡5) |
|
+ 16 |
+ 9 |
|
25 + 256 + 81 |
362 |
|
|
|
||||||||||||||||||||||||||||||||||
Пусть дан ненулевой вектор a¯. Рассмотрим вектор e¯ = |
|
. Покажем, что он имеет |
|||||||||||||||||||||||||||||||||||||||||||
ja¯j |
|||||||||||||||||||||||||||||||||||||||||||||
же направление, что и вектор a¯. Переход¯ |
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
a¯ |
|
|
||||||||||||||||||||||||||
|
|
от вектора a¯ к вектору e¯ = |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
a¯ |
j |
называют |
|||||||||||||||||||||||||||||||||||||||||
нормированием вектора a¯. |
|
|
|
|
|
|
|
|
¯ |
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|||||||||||||
длину, равную 1. Действительно, je¯j = |
|
jaa¯¯j |
= ja¯1jja¯j = 1. Очевидно, вектор e¯ имеет то |
||||||||||||||||||||||||||||||||||||||||||
Задача 17. Нормируйте вектор a¯ = (5; ¡6; 7). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Решение. Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
ja¯j = p |
|
|
|
|
|
= p |
|
|
|
|
|
= p |
|
: |
|
|
|
||||||||||||||||||||||||||
|
|
52 + (¡6)2 + 72 |
25 + 36 + 49 |
110 |
|
|
|
||||||||||||||||||||||||||||||||||||||
Поэтому |
|
|
ja¯j |
|
|
|
|
p110 |
|
|
|
³p110 |
p110 |
p110 |
´ |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
e¯ = |
|
|
a¯ |
= |
(5; ¡6; 7) |
|
= |
|
|
|
|
|
5 |
; |
¡6 |
; |
7 |
|
|
: |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Следствие 16. Расстояние между точками A(a1; a2; a3) è B(b1; b2; b3) может быть вычислено по формуле
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
jABj = p |
(b1 ¡ a1)2 + (b2 ¡ a2)2 + (b3 ¡ a3)2 |
: |
|
|
|
|
|
|
|
|
(3.3) |
||||||||
|
|
|
a¯ = |
¡! |
¯ = ¡¡! |
¡ ¡! |
= ( 1 ¡ |
|
1; |
|
2 ¡ |
2; |
|
3 |
¡ 3) |
|
|||||
Доказательство. Пусть |
|
|
AB. Тогда a |
OB |
OA |
b |
a |
|
b |
|
a |
b |
|
a |
. |
||||||
Отсюда |
jABj = ja¯j = p |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
(b1 ¡ a1)2 + |
(b2 ¡ a2)2 + (b3 ¡ a3)2: |
|
|
|
|
|
|
|
|
||||||||||||
Задача 18. Найти длину jABj отрезка AB, ãäå A(1; 0; 3) è B(0; 2; 1).
Решение. В силу формулы (3.3) имеем
|
jABj = p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
(0 ¡ 1)2 + (2, |
¡ 0)2 + (1 ¡ 3)2 = 3: |
|
|
|||||||||||||||||
Задача 19. Даны векторы a¯è= (2; ¡1; 3) |
¯ |
|
|
|
|
|
|
|
|
¯ |
¯ |
||||||||||
b = (4; 0; ¡3). Найти (a) a¯ ¢ b, (b) j3¯a ¡ 2bj, |
|||||||||||||||||||||
(c) нормировать векторы a¯ |
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
b. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ответ: (a) |
; (b) p |
|
; (c) |
|
2 |
|
|
|
|
1 |
|
3 |
, |
|
|
|
. |
|
|||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
¡ |
|
|
¯ |
|
|
|
|||||||||||
¡1 |
238 |
|
|
e¯a¯ = (p14 ; p14 |
; p14 ) |
e¯b |
= (0; 8; 0; ¡0; 6) |
|
|
||||||||||||
December 6, 2011 Курбатов В.Г. |
36 |
3.6 Угол между двумя векторами
Теорема 17. Косинус |
|
|
|
|
óãëà |
|
|
|
|
! |
|
|
|
|
|
|
|
|
|
между |
|
|
векторами |
|
|
||||||||||||||||
a¯ = (a1; a2; a3) |
è ¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b = (b1; b2; b3) может быть найден по формуле |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
|
|
|
|
a1b1 + a2b2 + a3b3 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
cos ! = |
|
ha;¯ bi |
|
= |
|
|
|
|
|
: |
|
|
|
|
|
(3.4) |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
, òî èçp |
|
|
|
|
|
|
|
b1 + b2 + b3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
ja¯j ¢ jbj |
|
|
a1 |
+ a2 + a3 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
¯ |
|
|
2 |
2 |
|
|
|
2 |
|
|
2 |
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
||||||
Замечание 5. Если |
¯ |
|
|
|
|
|
|
|
формулы (3.4) видно, что |
|
|
|
. Поэтому |
|
|
||||||||||||||||||||||||||
равенство |
|
|
|
a¯ ¢ b = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos ! = 0 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
a1b1 + a2b2 + a3b3 = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
называют условием перпендикулярности (ортогональности) векторов. Ср. со свой- |
|
|
|||||||||||||||||||||||||||||||||||||||
ством 4 скалярного произведения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è ¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Задача 20. Найти угол между векторами a¯ = (1; 2; 5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
b = (¡1; 3; 0). |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Решение. Воспользуемся формулой (3.4). Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
cos ! = |
|
1 |
¢ (¡1) + 2 ¢ 3 + 5 ¢ 0 |
|
= |
|
5 |
|
|
= |
1 |
|
: |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
p1 + 4 + 25p1 + 9 + 0 |
p300 |
2p3 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! = arctg |
2p |
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Задача 21. Найти косинус угла ABC треугольника ABC, ãäå A(2; ¡3; 0), B(3; 1; 2), |
|
|
|||||||||||||||||||||||||||||||||||||||
C(1; ¡2; 4). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение. Угол ABC можно интерпретировать как угол между векторами |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
a¯ = |
¡! |
|
3; 0) |
|
¡ |
(3; 1; 2) = (2 |
¡ |
3; |
¡ |
3 |
|
¡ |
1; 0 |
¡ |
2) = ( |
¡ |
1; |
¡ |
4; |
2); |
|||||||||||||||||||||
|
BA = (2; |
|
|
||||||||||||||||||||||||||||||||||||||
b = ¡¡! |
|
¡ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¡ |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
¯ |
BC = (1; |
2; 4) |
|
¡ |
(3; 1; 2) = (1 |
¡ |
3; |
¡ |
2 |
¡ |
1; 4 |
¡ |
2) = ( |
|
2; |
¡ |
3; 2): |
||||||||||||||||||||||||
|
|
|
¡ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¡ |
|
|
|||||||||||||
Косинус угла между векторами найдем по формуле (3.4):
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos ! = |
ha;¯ bi |
= |
|
|
|
|
(¡1) ¢ (¡2) + (¡4) ¢ (¡3) + (¡2) ¢ 2 |
|
|
= |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
¯ |
2 +p |
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
p |
|
2 |
|
2 |
|
2 |
|
||||
|
ja¯j ¢ jbj |
|
( |
¡ |
1) + ( 4) |
|
+ ( |
¡ |
2) ( 2) + ( 3) |
|
+ 2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
¡ |
|
|
|
|
|
|
|
¡ |
|
|
¡ |
|
|
|
|
||||
= |
|
|
|
12 |
¡ |
4 |
|
|
= |
|
10 |
|
|
= |
|
10 |
: |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
p1 + 16 + 4p4 + 9 + 4 |
p21 ¢ 17 |
p357 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Задача 22. Являются ли векторы a¯ = (2; 1; 3) |
è ¯ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
b = (¡3; 3; 1) перпендикулярными? |
|||||||||||||||||||||||||
Решение. Воспользуемся замечанием 5 и найдем скалярное произведение: |
||||||||||||||||||||||||||
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ha;¯ bi = 2 ¢ (¡3) + 1 ¢ 3 + 3 ¢ 1 = ¡6 + 3 + 3 = 0: |
|
|
|
|
|||||||||||||||||||||
Следовательно, векторы a¯ |
è ¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
b перпендикулярны. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Задача 23. Составить уравнение прямой, проходящей через точку (x0; y0) перпендикулярно вектору (A; B).
Решение. Ответ задается формулой
A(x ¡ x0) + B(y ¡ y0) = 0:
Действительно, это равенство означает перпендикулярность вектора (x ¡ x0; y ¡ y0), лежащего на прямой, вектору (A; B). 

Глава 4
Арифметическое векторное пространство
4.1 Основные понятия
Если в трехмерном пространстве фиксированы декартовы координаты, его при- нято обозначать символом R3. Аналогичным образом плоскость называют двумер-
ным пространством и обозначают R2. Одномерное пространство R1 ýòî îñü. Â этом параграфе мы рассмотрим абстрактное n-мерное пространство Rn, обобщающее
R3, R2 è R1.
Упорядоченный набор из n чисел (x1; x2; : : : ; xn) называют n-мерным (арифметическим) вектором, или просто вектором, или точкой и обозначают x¯. Арифме-
тический вектор обычно записываются в виде столбца или строки. Таким образом, арифметический вектор можно представлять себе как матрицу-столбец или матрицустроку. Числа xi, i = 1; 2; : : : ; n, называют компонентами или координатами векто-
ра. Множество всех n-мерных векторов называют n-мерным арифметическим пространством и обозначают Rn.
Следующие определения совпадают с аналогичными определениями для матриц. Векторы x¯ = (x1; x2; : : : ; xn) è y¯ = (y1; y2; : : : ; yn) называют равными, если x1 = y1,
x2 = y2, . . . , xn = yn. Суммой векторов x¯ è y¯ называют вектор x¯ + y¯ = (x1 + y1; x2 +
y2; : : : ; xn + yn). Аналогично определяют разность. Произведением числа ¸ и вектора |
|||||||
x¯ называют вектор ¸x¯ = x¸¯ = (¸x1; ¸x2; : : : ; ¸xn). Ср. с теоремой 11. |
|||||||
Нулевым называют вектор ¯ |
|
|
|
, имеющий нулевые координаты. Оче- |
|||
видны тождества |
0 |
= (0; 0; : : : ; 0) |
|
¯ ¯, |
¯. |
||
¯, |
¯ |
¯ |
, |
||||
|
x¯ ¡ x¯ = 0 x¯ + 0 = x¯ ¡ 0 = x¯ |
|
|
¸0 = 0 0 ¢ x¯ = 0 |
|||
Теорема 18. Операции сложения и умножения на число обладают свойствами:
1. x¯ + y¯ = y¯ + x¯. |
|
|
|
|
|
|
|
||
2. (¯x + y¯) + z¯ = x¯ + (¯y + z¯). |
¯ |
äëÿ âñåõ |
|
. |
|||||
3. |
Имеется такой вектор ¯, ÷òî |
|
|||||||
4. |
Для любого |
|
0 |
x¯ + 0 = x¯ |
|
|
, ÷òî |
x¯ |
¯. |
|
существует такой вектор |
¡x¯ |
|
||||||
5. |
1¯x = x¯. |
x¯ |
|
|
|
|
x¯ + (¡x¯) = 0 |
||
|
|
|
|
|
|
|
|
||
6. |
®(¯x¯) = (®¯)¯x. |
|
|
|
|
|
|
||
7. (® + ¯)¯x = ®x¯ + ¯x¯. |
|
|
|
|
|
|
|||
8. |
®(¯x + y¯) = ®x¯ + ®y¯. |
|
|
|
|
|
|
||
December 6, 2011 Курбатов В.Г. |
38 |
Оказывается, подавляющее большинство свойств пространства Rn является след-
ствием только этих 8 свойств. Более того, имеется много других примеров множеств X, на которых определены операции сложения и умножения на число, для которых
эти свойства выполняются. Например, множество всех многочленов или множество всех функций с общей областью определения. Всякое такое множество X называ-
ют векторным (линейным) пространством, а эти 8 свойств аксиомами линейного пространства. Для любого линейного пространства имеет смысл вся дальнейшая теория.
4.2 Линейная независимость
Возьмем в линейном пространстве X систему из k векторов x¯1, x¯2, . . . , x¯k. Всякий
вектор вида
®1x¯1 + ®2x¯2 + ¢ ¢ ¢ + ®kx¯k;
ãäå ®1, ®2,. . . , ®k числа, называют линейной комбинацией векторов x¯1, x¯2, . . . , x¯k. Систему векторов называют линейно зависимой, если можно подобрать числа ®1, ®2,. . . , ®k так, чтобы не все они были равны нулю и при этом выполнялось равенство
¯ |
(4.1) |
®1x¯1 + ®2x¯2 + ¢ ¢ ¢ + ®kx¯k = 0: |
|
Для системы, состоящей из двух геометрических векторов, линейная зависимость означает, что векторы коллинеарны. Для системы, состоящей из трех геометриче- ских векторов, линейная зависимость означает, что векторы лежат в одной или на параллельных плоскостях.
Систему векторов называют линейно независимой, если она не является линейно зависимой, т. е. если равенство (4.1) возможно только при условии, что ®1 = ®2 =
¢ ¢ ¢ = ®k = 0. Эти определения дословно переносятся на матрицы-строки и матрицыстолбцы.
Теорема 19. Система векторов x¯1, x¯2,. . . , x¯k линейно зависима тогда и только тогда,
когда один из векторов системы можно представить в виде линейной комбинации остальных векторов.
Теорема 20. Ранг матрицы равен максимальному числу ее линейно независимых строк (столбцов).
Задача 24. Найти (максимальное) число линейно независимых среди следующих век-
торов: (1; 0; 1), (2; 1; 3), (3; ¡1; 2), (4; 2; 6).
Решение. Составим из этих векторов матрицу:
00 |
1 |
1 |
21 |
: |
1 |
2 |
3 |
4 |
|
@1 |
3 |
¡2 |
6A |
|
Из примера 14: ранг этой матрицы равен 2. Поэтому в ней два линейно независимых столбца. 

December 6, 2011 Курбатов В.Г. |
39 |
4.3 Размерность и базис
Максимальное число линейно независимых векторов, которое можно образовать из элементов линейного пространства X, называют размерностью этого простран-
ства и обозначают символом dim X. Иными словами, число n является размерностью пространства X, если в нем имеется n линейно независимых векторов, но любые n+1
вектор образуют линейно зависимую систему.
Базисом в линейном пространстве X размерности n называют любую систему e¯1, e¯2, : : : , e¯n èç n линейно независимых векторов.
Теорема 21. Пусть e¯1, e¯2, : : : , e¯n базис линейного пространства X. Тогда всякий вектор x линейного пространства X можно единственным образом представить в
âèäå |
x¯ = ®1e¯1 |
+ ®2e¯2 + ¢ ¢ ¢ + ®ne¯n; |
(4.2) |
|
т. е. в виде линейной комбинации векторов e¯1, e¯2, : : : , e¯n.
Формулу (4.2) называют разложением вектора x¯ по базису e¯1, e¯2, : : : , e¯n, а числа ®1, ®2, . . . , ®n координатами вектора x¯ в этом базисе. Ср. с формулой (3.1).
Пример 25. Убедимся, что векторы
e¯1 = (1; 0; 0; : : : ; 0); e¯2 = (0; 1; 0; : : : ; 0);
: : : : : : : : : : : : : : : : : :
e¯n = (0; 0; 0; : : : ; 1)
образуют базис. Этот базис в Rn называют стандартным или каноническим. Действительно, для любого вектора
x¯ = x1e¯1 + x2e¯2 + ¢ ¢ ¢ + xne¯n:
Рассмотрим систему из n векторов
e¯i = (e1i; e2i; : : : ; eni); |
i = 1; 2; : : : ; n: |
Составим матрицу из их координат:
0
e11
BBe21
B @ . en1
e12 e22
en.2
1
: : : e1n
: : : e2nCC:
... . C
A
: : : enn
Такую матрицу называют матрицей системы векторов, а ее определитель определителем системы векторов.
Теорема 22. Для того чтобы система из n векторов являлась базисом, необходимо и достаточно, чтобы определитель этой системы был отличен от нуля.
Доказательство. Доказательство вытекает из теоремы 20.