

4.5 Методика определения основных параметров дебалансного вибровозбудителя
Основными параметрами дебалансного вибровозбудителя являются: вынуждающая сила, статический момент дебалансов, частота и амплитуда колебаний.
Определяется статический момент массы одного дебаланса (кг.м)
![]() ,
(4.1)
,
(4.1)
где
![]() - масса одного дебаланса, кг; ч
–эксцентриситет (расстояние от оси
вращения до центра тяжести неуравновешенной
части дебаланса), м.
- масса одного дебаланса, кг; ч
–эксцентриситет (расстояние от оси
вращения до центра тяжести неуравновешенной
части дебаланса), м.
Масса одного дебаланса определяется либо взвешиванием, либо методом измерения и расчета следующим образом (кг)
![]() ,
(4.2)
,
(4.2)
где
![]() - толщина дебаланса, м;
- толщина дебаланса, м;
![]() - удельный вес материала, из которого
выполнен дебаланс, кг/м3;
- удельный вес материала, из которого
выполнен дебаланс, кг/м3;
![]() - площадь неуравновешенной части
дебаланса, м2.
- площадь неуравновешенной части
дебаланса, м2.
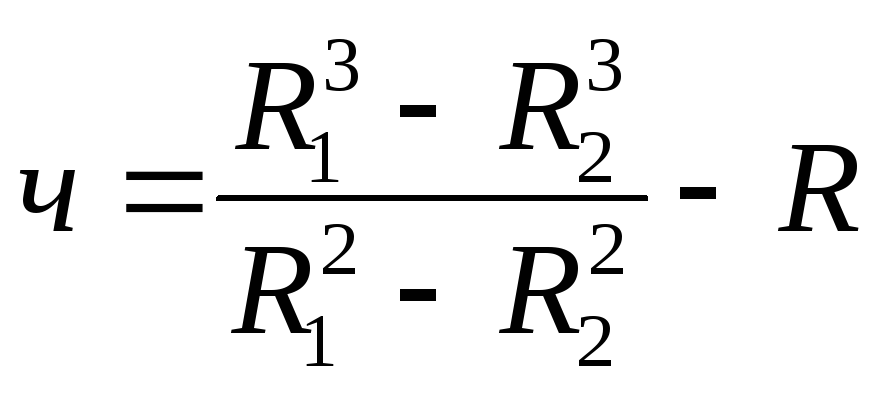
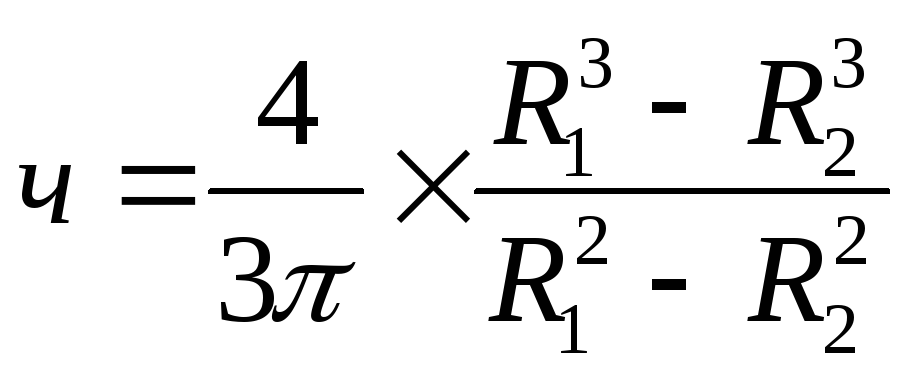
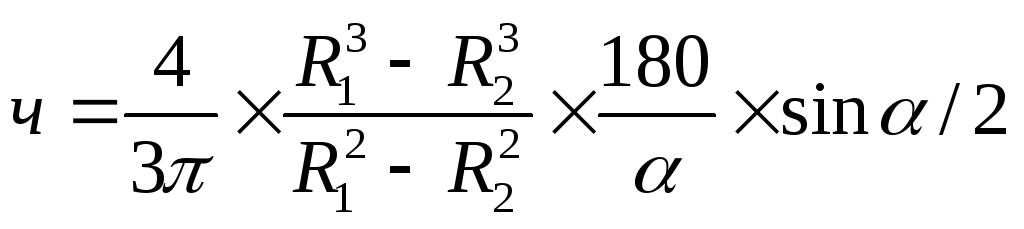
Площадь неуравновешенной части дебаланса и эксцентриситет, определяются в зависимости от формы дебаланса.
Таблица 4.1 – Расчетные формулы дебалансов различной формы
|
Формы дебалансов |
Расчетные формулы |
|
|
|
|
|
|
|
|
|
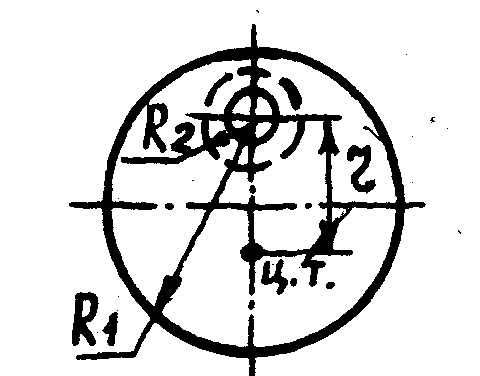
 ,
м
,
м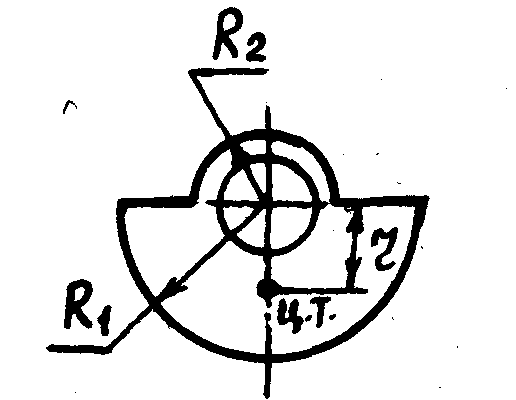
 ,
м
,
м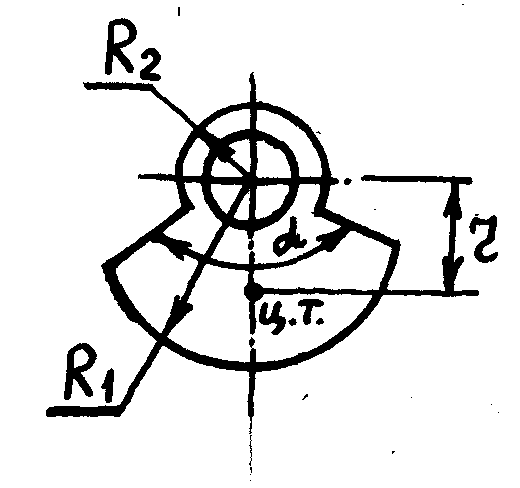
 ,
м
,
м
Суммарный статический момент неуравновешенный частей всех дебалансов вибровозбудителя определяется по формуле (кг.м):
![]() ,
(4.3)
,
(4.3)
где
![]() - количество дебалансов.
- количество дебалансов.
Возникающая при вращении дебалансов вынуждающая сила будет равна (Н)
![]() ,
(4.4)
,
(4.4)
где
![]() -
угловая скорость вращения дебалансов,
с-1.
-
угловая скорость вращения дебалансов,
с-1.
![]() ,
(4.5)
,
(4.5)
где
![]() - частота вращения вала дебаланса, мин-1.
- частота вращения вала дебаланса, мин-1.
Амплитуда колебаний вибровозбудителя определяется из выражения (м):
![]() ,
(4.6)
,
(4.6)
где
![]() - масса вибровозбудителя, кг.
- масса вибровозбудителя, кг.
4.6 Назначение, устройство и принцип действия ручного глубинного вибратора
Глубинные вибраторы применяют для уплотнения бетонных смесей при укладке их в монолитные бетонные и железобетонные конструкции с различной степенью армирования (фундаменты, стены, колонны, балки а др.), а также при изготовлении крупных бетонных и железобетонных изделий для сборного строительства.
Рабочим органом глубинного вибратора является цилиндрический вибронаконечник, погружаемый в уплотняемую смесь. Глубинный вибратор обладает небольшой массой, (до 25 кг) и высокой маневренностью, что дает возможность обслуживать его одним рабочим.
Классифицируются глубинные вибраторы по следующим признакам.
I. По характеру выполняемой работа: ручные и подвесные;
II. По виду привода: электромеханический, пневматический, гидравлический, ДВС.
III. По расположению привода: с вынесенным двигателем, со встроенным в корпус двигателем, с гибким валом, соединяющим электродвигатель с вибронакрнечником.
IV. По принципу действия: дебалансные: колебания создаются вращающейся в подшипниковых опорах неуравновешенной массы (дебаланса); планетарные: колебания создаются тяжелым элементом - бегунком, планетарно обкатывающемся по беговой дорожке в корпусе вибратора.
Рабочие органы (вибронаконечники) глубинных вибраторов с планетарным вибрационным механизмом подразделяются:
1) с внешней обкаткой бегунка - дебаланса, когда он своей наружной конической поверхностью обкатывается по внутренней конической поверхности втулки, приваренной к корпусу наконечника;
2) с внутренней обкаткой бегунка - дебаланса, когда он своей внутренней конической поверхностью обкатывается по конической поверхности пальца, запрессованного в днище корпуса наконечника.
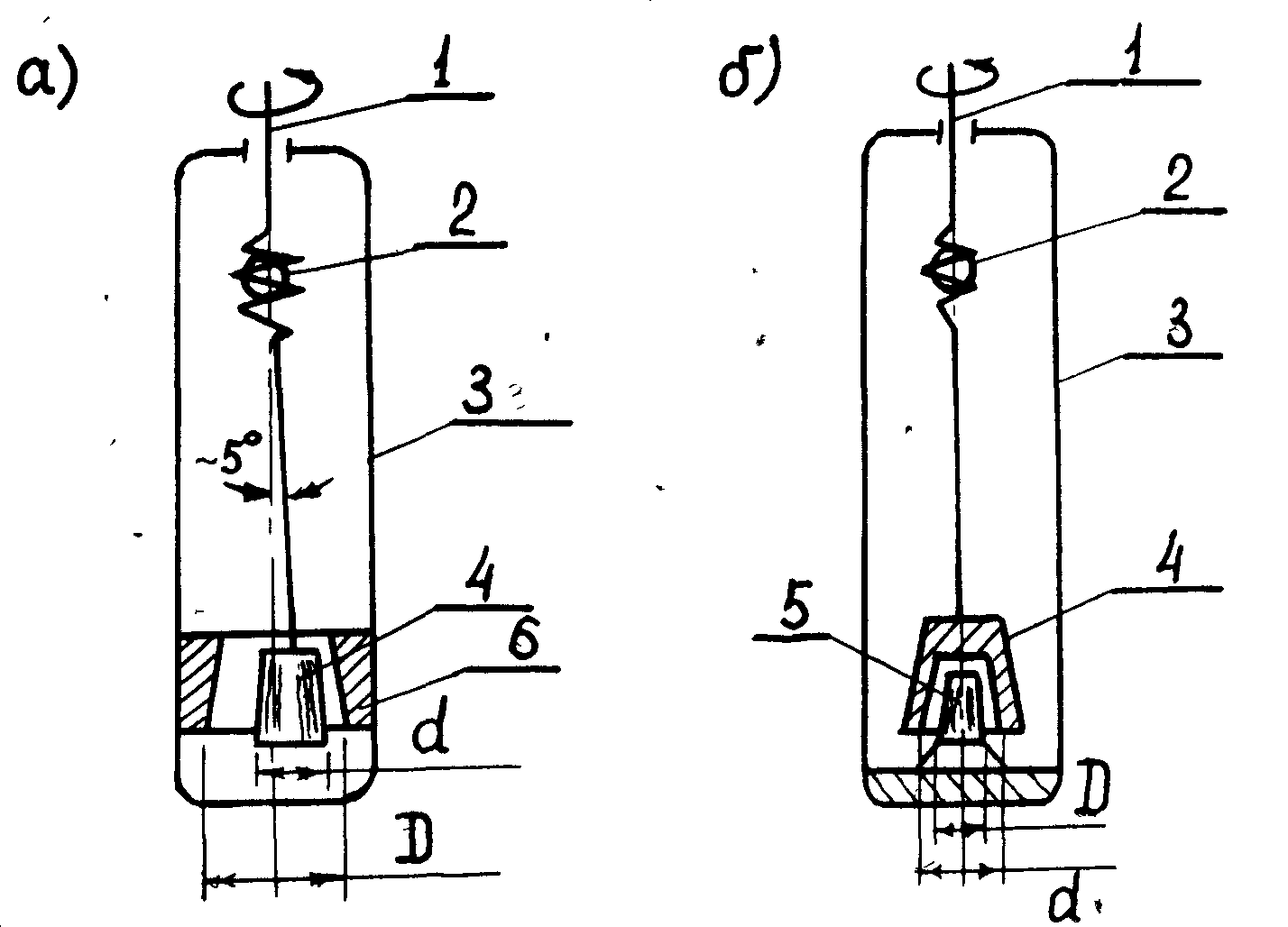
а) - с внешней обкаткой бегунка-дебаланса;
б) - о внутренней обкаткой бегунка-дебаланса;
1 - шпиндель ; 2 - упругая муфта; 3 - корпус вибронаконечника:4 - бегунок-дебаланс; 5 - неподвижный палец; б - неподвижная втулка.
Рисунок 4.2 - Схемы планетарных вибрационных механизмов
Изучаемый в данной работе ручной глубинный вибратор типа ИВ-47 представляет собой ручной глубинный электрический вибратор о гибким валом (рисунок 4.3). Источником колебаний его рабочего органа (вибронаконечника) является бегунок-дебаланс с внутренней обкаткой. Глубинный вибратор ИВ-47 состоит из переносного электродвигателя 1 с рукояткой для переноса и выключателем вибронаконечника; резино-металлического шланга-брони 2 со встроенным гибким валом правого вращения, который приводит, в действие шпиндель бегунка-дебаланса; сменного вибронаконечника 3 с планетарным вибрационным механизмом.
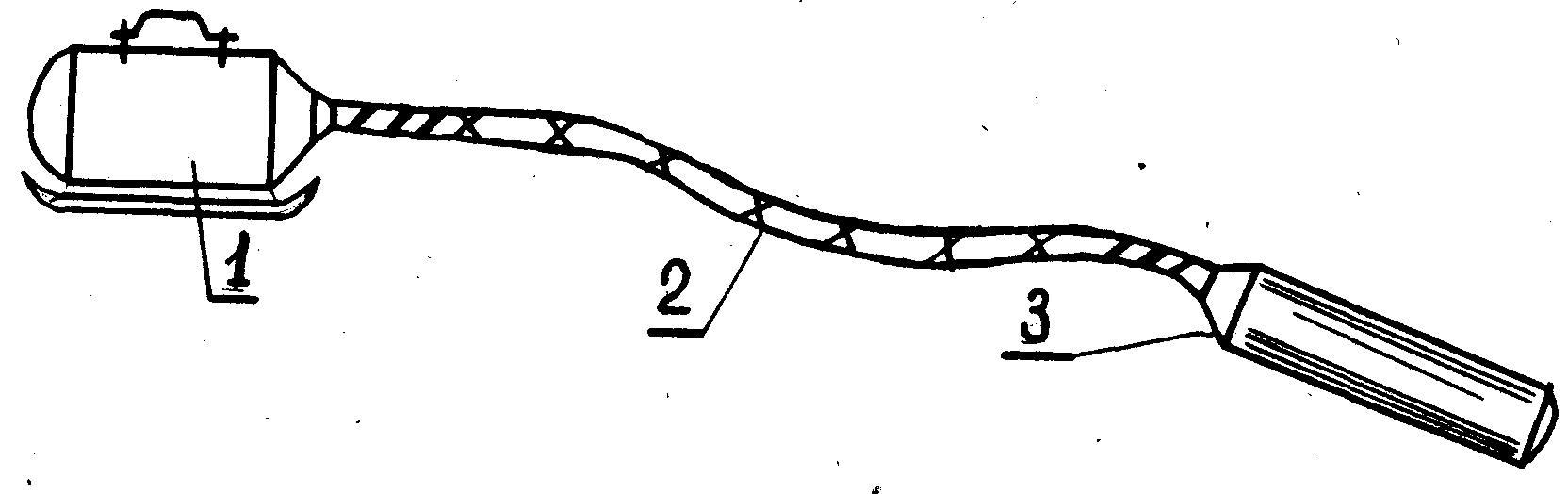
1 - электродвигатель; 2 - шланг-броня; 3 – вибронаконечник
Рисунок 4.3 - Ручной глубинный вибратор
При включении вибратора крутящий момент от электродвигателя через гибкий вал передается на шпиндель бегунка-дебаланса. Бегунок сначала вращается в воздухе, а затем под действием центробежной силы начинает отклоняться от геометрической оси вибронаконечника на угол до 5 градусов и наносить удары по неподвижному пальцу, возбуждая колебания корпуса наконечника.