

5.4 Устройство и принцип действия щековой дробилки со сложным движением щеки
Щековая дробилка со сложным движением щек предназначена для среднего дробления.
Конструктивно (рисунок 5.2) она состоит из металлической станины коробчатого сечения, затрузочного устройства с защитным кожухом для предотвращения вылета кусков материала из камеры дробления, подвижной и неподвижной щек, эксцентрикового вала, маховиков, распорной плиты и регулировочного устройства для регулирования величины выходной щели.
Подвижная щека представляет собой стальную отливку, которая верхней частью крепится к приводному эксцентриковому валу. В нижней части имеется паз, куда одним концом вставляется распорная плита. Другим концом распорная плита упирается в регулировочное устройство. Распорная плита является не только кинематическим заемном, но и служит предохранительным устройством, отключающим работу подвижной щеки, если в камеру дробления попадает недробимый материал.
К подвижной и неподвижной щекам крепятся ребристые дробящие плиты, соприкасающиеся о дробимым материалом.
На концах эксцентрикового вала установлены маховики, предназначенные для накопления энергии во время холостого хода и для подачи ее на дробление. Один из маховиков имеет проточки под ремни и используется в качестве приводного шкива, который приводится в движение с помощью клиноременной передачи от электродвигателя.
Крупность дробления материала регулируется изменением зазора между дробящими плитами с помощью винтового регулировочного устройства.
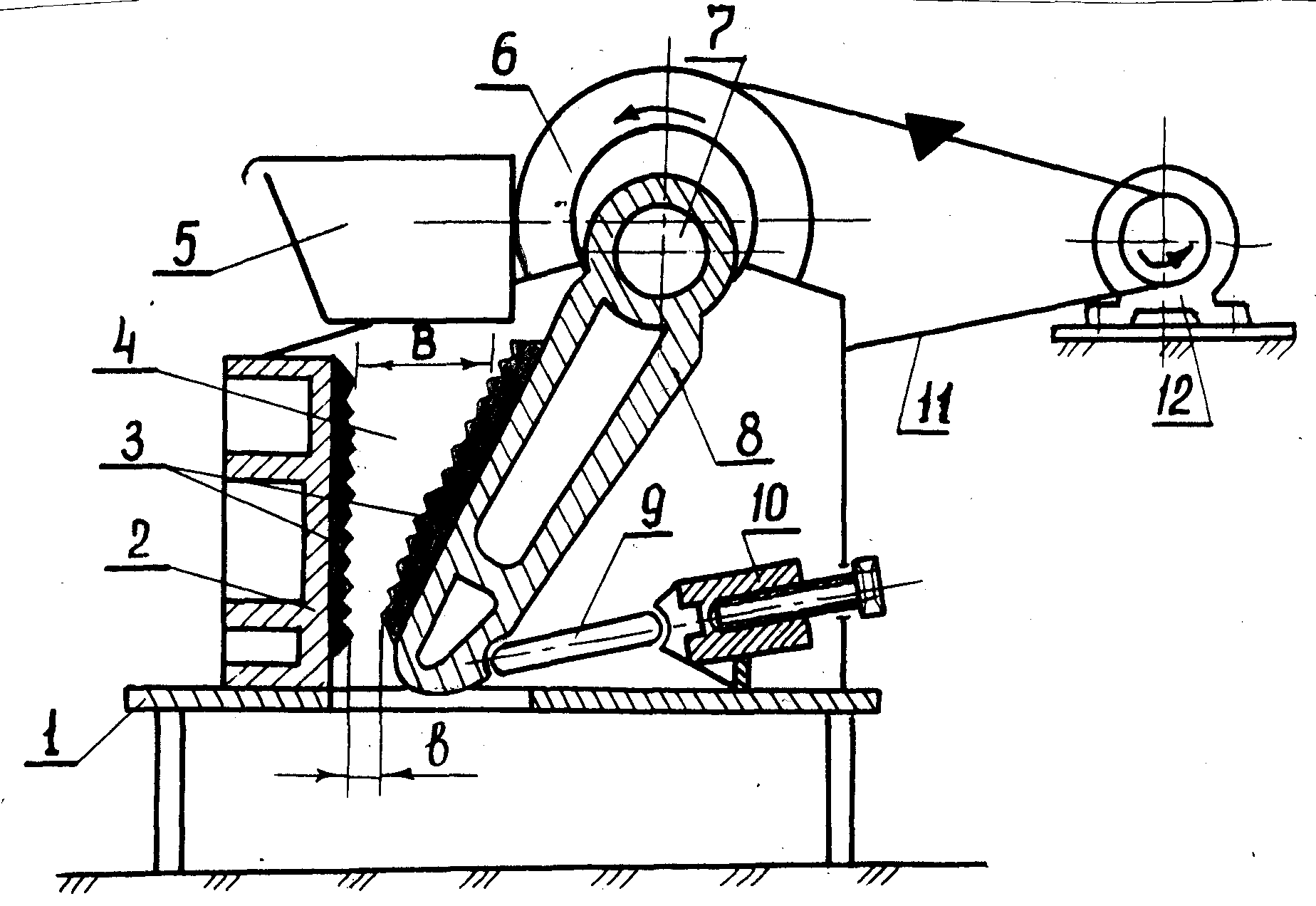
1 – основание; 2 - неподвижная щека; 3 - ребристые дробящие плиты; 4 - камера дробления; 5 - загрузочное устройство с защитным кожухом; 6 - маховик; 7 - эксцентриковый вал; 8 - подвижная щека; 9 - распорная плита; 10 - регулировочное устройство; 11 - клиноременная передача; 12- электродвигатель
Рисунок 5.2 - Конструктивная схема щековой дробилки со сложным движением щеки
5.5 Методика определения основных параметров щековой дробилки
Основными
параметрами щековой дробилки со сложным
движением щеки являются: типоразмер
дробилки (![]() ),
максимальная крупность кусков
материала в исходном материале (
),
максимальная крупность кусков
материала в исходном материале (![]() ),
требуемая максимальная крупность
готового продукта (
),
требуемая максимальная крупность
готового продукта (![]() ),
угол захвата (
),
угол захвата (![]() ),
ход подвижной щеки (
),
ход подвижной щеки (![]() ),оптимальное
число оборотов эксцентрикового вала
(
),оптимальное
число оборотов эксцентрикового вала
(![]() ),
производительность (П), мощность привода
(
),
производительность (П), мощность привода
(![]() ).
).
Ширина загрузочного отверстия должна обеспечивать свободный прием кусков максимальной крупности. Поэтому должно быть соблюдено условие (м):
![]() ,
(5.1)
,
(5.1)
где
![]() - максимальный размер куска до дробления,
м.
- максимальный размер куска до дробления,
м.
Длина загрузочного отверстия (длина камеры дробления) определяется (м)
![]() .
(5.2)
.
(5.2)
Размер выходной щели выбирается по заданному максимальному размеру продукта дробления из следующего соотношения (м)
![]() ,
(5.3)
,
(5.3)
где
![]() =
1,2...1,9 - коэффициент относительной
крупности продукта дробления в
щековых дробилках;
=
1,2...1,9 - коэффициент относительной
крупности продукта дробления в
щековых дробилках;![]() - максимальный размер продукта
дробления, м.
- максимальный размер продукта
дробления, м.
Для
исключения возможности выдавливания
дробимого материала вверх из камеры
дробления необходимо, чтобы угол захвата
(![]() )
между дробящими плитами был меньше
двойного угла трения:
)
между дробящими плитами был меньше
двойного угла трения:![]() ,
где
,
где![]() - угол трения камня по металлу.
- угол трения камня по металлу.
Обычно
на практике угол захвата изменяется
в пределах:
![]() =15...22°.
Код подвижной щеки определяется исходя
из величины сжатия дробимого материала
до момента разрушения в камере дробления
(м)
=15...22°.
Код подвижной щеки определяется исходя
из величины сжатия дробимого материала
до момента разрушения в камере дробления
(м)
![]() ;
;
![]() ,
(5.4)
,
(5.4)
где
![]() - ход сжатия подвижной щеки в верхней
точке камеры дробления, м;
- ход сжатия подвижной щеки в верхней
точке камеры дробления, м;![]() - ход сжатия подвижной щеки в нижней
точке камеры дробления, м;
- ход сжатия подвижной щеки в нижней
точке камеры дробления, м;![]() и
и![]() - размеры приемного отверстия и выходной
щели, м.
- размеры приемного отверстия и выходной
щели, м.
Величину среднего хода подвижной щеки рекомендуется определять как полусумму ходов щеки в верхней и нижней зонах камеры дробления (м)
![]() .
(5.5)
.
(5.5)
Оптимальная частота вращения эксцентрикового вала, равная числу двойных качаний щеки, определяется по формуле (с-1)
![]() ,
(5.6)
,
(5.6)
где
![]() - ускорение
свободного падения, м/с2.
- ускорение
свободного падения, м/с2.
Производительность щековой дробилки определяется по формуле (м3/ч)
![]() ,
(5.7)
,
(5.7)
где
![]() - коэффициент кинематики дробилки (для
дробилок с простым качанием щеки
- коэффициент кинематики дробилки (для
дробилок с простым качанием щеки![]() =0,84;
со сложным -
=0,84;
со сложным -![]() =1);
=1);![]() - средневзвешенный размер кусков
исходного материала, м.
- средневзвешенный размер кусков
исходного материала, м.
Средневзвешенный
размер исходного материала (![]() )
и продукта дробления (
)
и продукта дробления (![]() )
определяется либо по результатам
зернового состава, либо рассчитывается
по эмпирическим зависимостям (м):
)
определяется либо по результатам
зернового состава, либо рассчитывается
по эмпирическим зависимостям (м):
![]() ;
;
![]() . (5.8)
. (5.8)
Производительность щековой дробилки можно определить и экспериментально (м3/ч)
![]() ,
(5.9)
,
(5.9)
где
![]() - объем материала, загружаемого в
дробилку, м3;
- объем материала, загружаемого в
дробилку, м3;
![]() - время дробления материала, с.
- время дробления материала, с.
Измельчение
материала в процессе дробления
характеризуется степенью измельчения:
![]() ,
где
,
где![]() -
максимальный размер кусков исходного
продукта, м;
-
максимальный размер кусков исходного
продукта, м;![]() - максимальный размер кусков конечного
продукта, м.
- максимальный размер кусков конечного
продукта, м.
Мощность привода щековой дробилки определяется (кВт)
![]() ,
(5.10)
,
(5.10)
где
![]() - предел прочности дробимого материала
на сжатие, Па;
- предел прочности дробимого материала
на сжатие, Па;![]() -
модуль упругости дробимого материала,
Па;
-
модуль упругости дробимого материала,
Па;![]() - диаметр загружаемого в дробилку
материала, м;
- диаметр загружаемого в дробилку
материала, м;![]() - диаметр раздробленного материала, м;
- диаметр раздробленного материала, м;![]() = 0,35...0,5 - к. п. д. механизма привода.
= 0,35...0,5 - к. п. д. механизма привода.