

555_Innovatsii_inauchno-tekhnicheskoe_tvorchestvo_molodezhi2014_
.pdfстатистическими свойствами, которые могут еще и меняться в ходе проведения измерений и испытаний по заданной их программе.
ИССЛЕДОВАНИЕ УСТРОЙСТВ ОБРАБОТКИ ЗВУКА И ЗВУКОВЫХ ЭФФЕКТОВ С ПОМОЩЬЮ ПАКЕТА MATLAB
Кочергин А.А., Русяев А.С. СибГУТИ, Новосибирск
e-mail: ram3n-l@mail.ru, тел. 79235279920
Научный руководитель – Калачиков А.А., доцент СибГУТИ
Использование электронно-вычислительных средств значительно облегчило процесс обработки любых сигналов, в том числе и звуковых. Это обусловлено тем, что достаточно лишь представить непрерывный аналоговый сигнал в виде двоичного кода, понятного ЭВМ. Далее необходимо лишь задать процессору нужные алгоритмы вычислений, чтобы на выходе получить желаемый сигнал.
Вцифровой обработке звуковых сигналов применяется огромное количество эффектов и методов, которые отличаются своими свойствами и имеют свои особенности. Эти эффекты широко используются в студиях звукозаписи, а также в готовых звуковых процессорах.
Моделирование звуковых систем можно легко осуществить с помощью Mathworks MATLAB. Программа позволяет реализовать свой алгоритм или использовать уже готовый. Также она позволяет сформировать свои собственные семплы, обрабатывать их, и сравнивать звучание с теми, которые получаются при работе с реальным оборудованием. С помощью этого пакета легко можно отслеживать изменения сигналов на всех шагах обработки.
Вработе был представлен обзор базовых звуковых эффектов и методов обработки, произведено их математическое моделирование, исследование характеристики сравнение с реальными устройствами, доступными в продаже.
Предлагается работать как с искусственными образцами звука, синтезированными в MATLAB, так и с реальными звучаниями музыкальных инструментов.
ИССЛЕДОВАНИЕ МЕТОДА СНИЖЕНИЯ ПИК-ФАКТОРА СИГНАЛА
OFDM
Скавитин С.С. СибГУТИ, Новосибирск тел.: 79538695963
Научный руководитель - Калачиков А.А., доцент СибГУТИ
OFDM — ортогональное мультиплексирование с частотным разделением. Является цифровой схемой модуляции, которая использует большое количество близко расположенных по частоте поднесущих.
231

Оптимальный выбор параметров каждой поднесущей (прежде всего –
частоты Δf 1 ) позволяет построить систему с перекрывающимися
NT
спектрами соседних поднесущих. Но благодаря взаимной ортогональности между всеми поднесущими на приемной стороне всегда можно выделить каждый составляющий сигнал на своей частоте. OFDM характеризуется сильным перекрытием спектров соседних поднесущих, что позволяет уменьшить в два раза значение частотного разноса и во столько же раз повысить плотность передачи цифровой информации (бит/с)/Гц. Благодаря ортогональному методу демодуляции поднесущих группового спектра происходит компенсация помех от соседних частот, несмотря на то, что их боковые полосы взаимно перекрываются.
Так как OFDM сигнал представляет собой сумму большого количества ортогональных гармонических составляющих, при некоторых синфазных комбинациях этих составляющих в сигнале появляются большие выбросы амплитуды.
Пик-фактор сигнала – это отношение максимальной мощности сигнала к средней мощности сигнала.
Максимальная |
выходная мощность |
зависит от максимальной |
входной мощности |
нелинейно, имеется область насыщения. Наличие |
|
такой нелинейности в энергетической характеристике приводит к нелинейным искажениям входного сигнала с большим динамическим диапазоном, появлению нежелательных спектральных составляющих в спектре сигнала. Применение усилителей с большим динамическим диапазоном линейной характеристики приводит к значительному увеличению стоимости аппаратуры и снижению КПД передатчика. При большом пик-факторе и переходе в насыщение в спектре сигнала появляются новые гармоники, нарушается ортогональность и сигнал искажается в пределах своей полосы частот.
Сигнальное созвездие одной поднесущей OFDM сигнала. Представляется в виде двухмерной точечной диаграммы на комплексной плоскости, точками на которой являются все возможные символы, представленные в геометрической форме. Например превышение пик-фактора произошло в точке с амплитудой косинуса -1, и синуса –1 (т.е. это символ «1101»). Как мы знаем, пик-фактор это отношение максимальной мощности колебаний к средней мощности сигнала на всем отрезке длительности символа OFDM, поэтому, для уменьшения этого отношения мы усиливаем (увеличиваем амплитуду колебаний сигналов во всех крайних точках созвездия) соседние сигналы для коррекции средней мощности всего сигнала, следовательно уменьшая таким образом пик-фактор.
232

АНАЛИЗ ВЛИЯНИЯ ИСТОЧНИКОВ ОШИБОК ПРОГНОЗА ОСТАТОЧНОГО РЕСУРСА РЭС НА ТОЧНОСТЬ ПРОЦЕССА ПРОГНОЗИРОВАНИЯ
Солодов П.С. СибГУТИ, Новосибирск
Научный руководитель – Воробьёва С. В., доцент СибГУТИ
Остаточный ресурс объекта определяет продолжительность эксплуатации с данного момента времени до достижения предельного технического состояния. Вопрос правильности определения рабочего ресурса оборудования занимает всё более важное место во время проектирования и производства РЭС. От величины ошибки прогноза может зависеть работоспособность не только одного отдельно взятого РЭС, но и всей системы связи в целом (если это комплекс средств связи). Поэтому вопрос правильного определения ошибки прогноза стоит наиболее остро в технике связи экстренных служб и военной техники связи.
Использование методов индивидуального прогнозирования позволяет заблаговременно предупредить отказы из-за наличия аномально плохих элементов, которые не удается выявить при приемочном контроле и специальных испытаниях. Одним из методов индивидуального прогнозирования ресурса оборудования сложных систем является метод "Метод прогнозирования - авторегрессия с обучением" (МАСО), который основан на авторегрессионной модели с широким использованием на этапе обучения информации об изменении параметра технического состояния (ПТС) объектов, аналогичных прогнозируемому. Расчет прогнозного значения ресурсного параметра ведется на основе универсальной прогнозирующей функции (ПФ) авторегрессионного типа по его текущим значениям
k
Yˆkj l CilYi j, i 1
где  — значение упреждения;
— значение упреждения; 
 — база прогноза,
— база прогноза, 






 .
.
Центральным моментом индивидуального прогнозирования технического состояния объекта является выбор ПФ. Выбирая ПФ необходимо учитывать: характер протекания процесса (эволюционный или имеется скачкообразное изменение механизма процесса); вид функций, описывающих тренд; степень изученности процесса, что эквивалентно виду математического описания; прошлый опыт, который позволяет определить класс функций, в котором отыскивается ПФ.
После выбора прогнозирующей функции вторым центральным вопросом теории прогнозирования вообще и индивидуального в частности, является вопрос ошибки прогноза. В работе проанализированы источники ошибки прогноза, влияние их на точность прогнозирования. Прогноз проведен по
233
рассмотренной методике МАСО, по алгоритму написана программа в среде
Matlab.
ИССЛЕДОВАНИЕ ПРИМЕНЕНИЯ ПЕРЕМЕЖЕНИЯ И LDPC
КОДИРОВАНИЯ В СИСТЕМЕ DVB-T2
Суворова М., Калачиков А.А. СибГУТИ, Новосибирск
e-mail: 330rts@gmail.com, тел.: 2698267
Научный руководитель – Калачиков А.А., доцент СибГУТИ
Качество приема сигналов цифрового телевидения, как любой системы цифровой связи, сильно зависит от условий распространения радиоволн. В городских условиях сильное влияние на передачу оказывает многолучевое распространение и вызванные им замирания сигналов, которые ведут к появлению пакетов ошибок. Эффективным средством борьбы с пакетами ошибок является перемежение символов кодовых слов и помехоустойчивое кодирование.
Целью работы является анализ временного перемежения и помехоустойчивого кодирования в системе DVB-T2.
Перемежение используется для преобразования групповых ошибок, возникающих в канале связи из-за наличия глубоких замираний сигнала в условиях многолучевого распространения, в одиночные, с которыми легче бороться с помощью помехоустойчивого кодирования.
Временной перемежитель должен разнести данные соответствующего PLP на максимально большой интервал (до сотен миллисекунд). Это увеличивает защищенность против группирующихся ошибок.
На вход перемежителя подаются кодовые слова кода LDPC. Определенное число кодовых слов объединяются в блок перемежения (interleaving block) и далее в кадр перемежения (interleaving frame).
Каждый кадр перемежения отображается на один или более Т2-кадров. Каждый кадр перемежения состоит из одного или нескольких блоков перемежения), соответствующих одному обращению к памяти временного перемежителя. Блоки перемежения в пределах кадра перемежения могут содержать различное количество FEC-блоков. Если кадр перемежения состоит из нескольких TI-блоков, то он отображается только на один Т2-кадр.
Существует три варианта временного перемежения для каждого PLP:
1 - Каждый кадр перемежения состоит из одного TI-блока и отображается только на один Т2-кадр. Такой вариант соответствует значениям полей
TIME_IL_TYPE=0 и TIME_IL_LENGTH=1;
2 - Каждый кадр перемежения состоит из одного TI-блока и отображается на несколько Т2-кадров. Это способствует увеличению временного разнесения для услуг с низкой скоростью передачи данных.
3 - Каждый кадр перемежения отображается только на один Т2-кадр и состоит из нескольких TI-блоков. Каждый TI-блок может использовать всю
234

память временного перемежителя, тем самым увеличивается максимальная скорость передачи данных для PLP, но снижается глубина перемежения.
Для анализа временного перемежения и кодирования LDPC используется библиотека программ, написанных для Matlab.
ИССЛЕДОВАНИЕ ПРОПУСКНОЙ СПОСОБНОСТИ КАНАЛА MIMO
Щелкунов Н.С. СибГУТИ, Новосибирск
e-mail: shns@ngs.ru, тел.: 79232508521
Научный руководитель – Калачиков А.А., доцент СибГУТИ
В настоящее время идёт бурное развитие беспроводных сетей связи, технологии которые используются при этом, позволяют осуществлять увеличение скорости передачи данных. Одна из технологий, которая позволяет это реализовать – это технология MIMO(множественный вход – множественный выход).
Канал MIMO в радиосистемах образуется при применении m антенн на передающей стороне и n антенн на приемной стороне (рисунок).
Рисунок - Общая структура канала MIMO
Входной сигнал систем связи MIMO преобразуется по правилу (1.1)
(1.1)
где 
 - вектор сигнала на приемной антенне, H – матрица комплексных
- вектор сигнала на приемной антенне, H – матрица комплексных
коэффициентов передачи канала, 
 - вектор сигнала передающей антенны,
- вектор сигнала передающей антенны, 
 -
-
вектор щума в канале связи.
Формула Шеннона для расчета удельной пропускной способности для однолучевого канала будет определяться выражением (1.2)
(1.2)
где С/Ш – отношение сигнал/шум.
Скорость передачи данных при заданной ширине спектра сигнала и отношения сигнал/шум можно выразить в соответствии с выражением (1.3)
235

(1.3)
где F– ширина спектра сигнала, С/Ш – отношение сигнал/шум.
При использовании технологии MIMO скорость передачи данных в общем виде можно определить выражением (1.4)
(1.4)
где M зависит от конфигурации MIMO системы, M=min{Мпрд, Мпр},
где Мпрд – это число передающих антенн, Мпр – это число приемных антенн. Для систем MIMO таких как SIMO(один вход – много выходов) и
MISO(много входов – один выход) скорость передачи данных имеет логарифмическую зависимость (1.5)
(1.5)
При переходе от системы с однолучевым каналом к системе MIMO достигается значительное увеличение скорости передачи данных.
В дальнейшей работе планируется провести экспериментальную оценку пропускной способности для системы MIMO 2х2.
Литература:
1.Nelsom Costa, Simon Haykin, MUTIPLE-INPUT MULTIPLE-OUTPUT CHANNEL MODELS: Theory and Practice, John Wiley & Sons Ltd, 2010, p. 225.
2.Тихвинский В. О., Терентьев С. В., Юрчук А. Б. Сети мобильной связи LTE: технологии и архитектура. – М.: Эко-Трендз, 2010.- 284 с.: ил.
3.Molisch, Andreas F., Wireless Communications, 2 ed, Wiley – IEEE, 2011,
844p.
ОЦЕНКА ВРЕМЕНИ РАСПРОСТРАНЕНИЯ РАДИОСИГНАЛА В ЗАДАЧАХ ОПРЕДЕЛЕНИЯ КООРДИНАТ
Якунин В.Ю., Калачиков А.А. СибГУТИ, Новосибирск
Система позиционирования (определения местоположения) в режиме реального времени (RTLSRealtime Locatoins system) на основе беспроводных сетей представляет собой сеть стационарных узлов (базовых станций BS), а так же подвижные узлы, являющиеся мобильными объектами (мобильные станции MS), местоположение которых необходимо определить. Оценка местоположения включает в себя два этапа. Во-первых, оценивается ряд параметров сигнала, связанных с позицией. Во-вторых, на основе этих параметров сигнала определяется положение мобильного объекта в двухили трехмерном пространстве.
Исходя из постоянства скорости света (











 м/с) в среде свободной от объектов, информация о расстоянии между узлами беспроводной сети может быть получена из измерения задержки распространения или времени
м/с) в среде свободной от объектов, информация о расстоянии между узлами беспроводной сети может быть получена из измерения задержки распространения или времени
236
прохождения сигнала (time of flight - TOF) 







 , где d расстояние между узлами.
, где d расстояние между узлами.
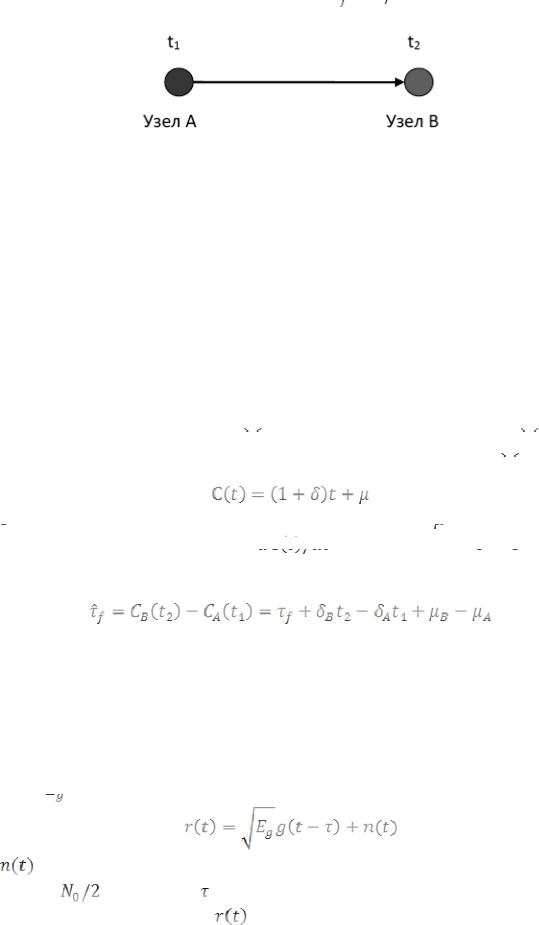
Рисунок – Односторонняя дальнометрия
Время распространения сигнала τf, в системах односторонней дальнометрии (рисунок), вычисляется как разность времени отправки t1 сигнала узлом А и времени t2 приёма сигнала узлом B для чего требуется очень точная и сложная система синхронизации часов отправителя и получателя.
Точность, с которой должны быть синхронизированы базовые и мобильные станции пропорциональна скорости сигнала и желаемой точности измерения расстояния. С этой целью узлы оснащаются генератором, производными которого являются внутренние эталонные часы, необходимые для измерения истинного времени t. Многочисленные физические эффекты являются причиной независимого дрейфа частот в генераторе, что приводит к большим ошибкам в измерении времени. Местное время по часам узла может быть выражено как функция 






 истинного времени t, где
истинного времени t, где 








 для идеальных часов. Как следствие, доступна только оценка
для идеальных часов. Как следствие, доступна только оценка 









 истинного времени t.
истинного времени t.
где 
 - дрейф часов относительно правильной скорости, а
- дрейф часов относительно правильной скорости, а 
 - сдвиг часов. Скорость для идеальных часов
- сдвиг часов. Скорость для идеальных часов 










 составляет 1 (т.е.
составляет 1 (т.е. 



 ).
).
Оценка задержки распространения сигнала в односторонней дальнометрии:
Уравнение показывает, что на оценку времени влияют дрейф и смещение часов.
В системах позиционирования основанных на дальнометрии, ключевым аспектом является оценка времени рапространения радиосигнала TOA (Time of Arrival), которая связана с отношением сигнал шум SNR.
Пусть в канале с аддетивным белым гауссовским шумом (additive while Gaussian noise - AWGN) передается и принимается неискаженным сигнал с энергией 

 . Принимаемый сигнал задается выражением
. Принимаемый сигнал задается выражением
где |
- AWGN с нулевым средним и двусторонней спектральной плотностью |
||
мощности |
. Параметр |
представляет TOA, которое нужно оценить на |
|
основе принимаемого сигнала |
в течении интервала времени [0, T0b). |
||
237
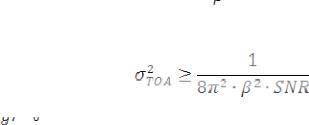
Моделью которая ограничивает точность оценки времени в соответствии с SNR и эффективной полосой сигнала 
 , является нижний предел Крамера-Рао (Cramer-Rao lower band - CRB). Который дает нижнюю границу оценки дисперсии TOA.
, является нижний предел Крамера-Рао (Cramer-Rao lower band - CRB). Который дает нижнюю границу оценки дисперсии TOA.
где 













Из неравенства видно что улучшение точности оценки TOA квадратично зависит от эффективной полосы сигнала и линейно от его мощности.
СИСТЕМЫ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ РЕАЛЬНОГО ВРЕМЕНИ
Якунин В.Ю., Калачиков А.А. СибГУТИ, Новосибирск
Внастоящее время распространены радиочастотные системы определения местоположения реального времени (RTLSRealtime Locatoins system).
Классическим примером глобальной системы RTLS являются спутниковые системы навигации GPS/GLONASS. На базе навигационных приемников строятся системы дальнего радиуса действия, позволяющие получать информацию о местоположении объекта и передавать ее в центр слежения и обработки по беспроводным каналам связи (например GSM/GPRS). Однако системы спутниковой навигации не работают в зданиях, сооружениях, метро, тоннелях, т.е. там, где нет радио-видимости спутников. В таких случаях применяются системы локального определения местоположения.
Определение местоположения и идентификация персонала, техники и дорогостоящего оборудования в зданиях и сооружениях позволяет добиться четкой координации между персоналом, обеспечить быстрый доступ к технике, оборудованию, транспортным средствам, синхронизировать технологические процессы внутри предприятия, снизить затраты, за счет уменьшения количества оборудования, улучшить качество работы персонала и создать более надежную систему безопасности.
Система локального позиционирования на основе беспроводных сетей представляет собой сеть стационарных узлов, а так же подвижные узлы, являющиеся мобильными объектами, координаты которых необходимо определить. На основе некоторых параметров сигналов, которыми обмениваются объекты и стационарные узлы, принимается решение о координатах объектов.
Локальная система позиционирования может быть организована как за счет существующих WLAN сетей, так и за счет построения сети считывателей с известным местоположением и активных радиочастотных меток.
Врадиочастотных системах, можно выделить следующие технологии позиционирования:
238
-позиционирование в сотовых сетях первоначально производилось по координатам соты, к которой подключен объект, а точность определялась радиусом действия соты, для «пикосот» точность может составлять 100-150 метров, но в большинстве случаев – это километр и более. Более точные способы определения координат в сотовых сетях основываются на измерении данных от нескольких базовых станций, что позволяет установить местоположение абонента с точностью до 100 м.
-организованные за счет существующих WLAN сетей стандарта IEEE 802.11 (WiFi), решение о координатах объектов принимается по факту их подключения к конкретной базовой станции и на основе уровня принимаемого сигнала RSSI, при этом точность позиционирования обеспечивается порядка
10-15 метров.
-ультра широкополосная технология – Ultra Wideband (UWB). Это радиочастотная технология, использующая импульсоподобные сигналы с максимально возможной шириной спектра излучения при минимально возможной центральной частоте, при этом ширина спектра достигает нескольких гигагерц. Технология характеризуется высокой точностью позиционирования, даже при наличии отраженных сигналов. Проблемами использования этой технологии является невозможность построения системы с приемлемой для мобильных меток мощностью передатчика, и ограничения со стороны органов частотного регулирования.
-радиочастотное позиционирование по технологии «ближнего поля»
NFER – основана на зависимости сдвига фаз между электрической и магнитной составляющих электромагнитного поля в ближнем поле антенны. Оптимальная для измерения расстояния дистанция между приемником и передатчиком лежит
впределах половины длины волны. Для обеспечения достаточно большой дистанции, передатчики базовых станций должны использовать относительно низкие частоты от 1 МГц (длина волны 300 м, оптимальная дистанция до 150 м) до 10 МГц (длина волны 30 м, оптимальная дистанция до 15 м). Реальные NFER
– системы обеспечивают позиционирование с точностью 0,5-1 метр на расстоянии 20-30 метров.
-технология NanoLOC (IEEE 802.15.4a) разработанная компанией Nanotron Technologies GmbH. Технология позволяет измерять расстояние между передатчиком и приемником во время передачи данных, для чего используется расширение спектра методом линейно частотной модуляции (CSS-модуляция, Chirp Spread Spectrum) в соответствии со стандартом ISO 24730-5. Измерение расстояния основано на методе SDS-TWR (симметричного двухстороннего двунаправленного измерения расстояния) позволяет обеспечить необходимую точность, не прибегая к дорогостоящей синхронизации. Система работает в диапазоне частот 2,4 ГГц, используемая ширина полосы составляет 80МГц, поэтому узкополосные помехи и многолучевое распространение не влияет на ее работу.
-системы позиционирования с использованием активных RFID меток,
основаны на методах измерения времени прибытия сигнала или разности моментов времени прихода сигналов, активная RFID метка излучает сигнал с
239
уникальным идентификационным кодом по команде или с заданной периодичностью. Сигнал метки должны принять три или более базовых станций, при этом требуется обеспечить их синхронизацию, погрешность которой ограничивает точность позиционирования.
240