

Контрольная работа № 2 по дисциплине «Теоретическая механика»
Задача 1. Определить моменты сил Р1, Р2, Р3 относительно точки А (рис. 2.1). Исходные данные приведены в табл. 2.1*.

Рис. 2.1
Таблица 2.1
Параметр |
Вариант |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
q, H·м |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
M, H·м |
2 |
4 |
6 |
2 |
4 |
6 |
2 |
4 |
6 |
2 |
a, м |
1 |
2 |
3 |
1 |
2 |
3 |
1 |
2 |
3 |
1 |
b, м |
3 |
1 |
2 |
3 |
1 |
2 |
3 |
1 |
2 |
3 |
с, м |
2 |
3 |
1 |
2 |
3 |
1 |
2 |
3 |
1 |
2 |
d, м |
4 |
2 |
6 |
4 |
2 |
6 |
4 |
2 |
6 |
4 |
l, м |
2 |
0,5 |
1 |
2 |
0,5 |
1 |
2 |
0,5 |
1 |
2 |
α, град. |
30 |
45 |
60 |
120 |
135 |
150 |
210 |
225 |
240 |
300 |
β, град. |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
γ, град. |
60 |
30 |
45 |
60 |
30 |
45 |
60 |
30 |
45 |
60 |
Примечания. Для схем нагружения (задачи 1 – 5).
1. Значение сил Р1 и G выбирают делением номера зачетной книжки на 2 (для номеров с 00 по 30), на 3 (с 31 по 60), на 4 (с 61 и далее). Полученные значения округляются до целого числа.
2. Значение силы Р2 получают умножением полученного значения силы Р1 на 1,5 с последующим округлением до целого числа.
3. Значение силы Р3 получают умножением полученного значения силы Р1 на 2.
4. В задаче 2 силу Р2 для нечетных вариантов задания направлять вниз, для четных — вверх; силу Р3 направлять противоположно силе Р2.
5. В задачах 3 и 4 направление момента М для нечетных вариантов задания выбирать по часовой стрелке, для четных — против.
6. В задаче 3 силу Р2 для нечетных вариантов задания направлять влево, для четных — вправо.
7. В задаче 4 силу Р2 для нечетных вариантов задания направлять вверх, для четных — вниз.
8. В задаче 1 силу Р1 направлять горизонтально вправо для нечетных вариантов, для четных — горизонтально влево; силу Р2 — вертикально вверх для нечетных вариантов, вертикально вниз — для четных.
9. В задачах 1, 2, 4 и 5 углы α, β, γ откладывать в направлении, указанном стрелкой.
Указания. Моментом силы относительно точки называется произведение модуля силы на ее плечо:
![]() . (2.1)
. (2.1)
Условно принято считать момент силы положительным, если сила стремится повернуть тело против часовой стрелки, и отрицательным, если по часовой стрелке.
Если линия действия силы проходит через данную точку, то момент силы равен нулю.
Пример. Определим моменты сил F1, F2, F3, F4 относительно точки А (рис. 2.2), если АВ = 0,7 м, AD = 0,4 м, AC = 0,2 м, F1 = 10 H, F2 = 25 H, F3 = 5 H, F4 = 8 H, = 45°.

Рис. 2.2
Решение.
1. Момент силы F1 относительно точки А отрицательный, а плечо силы равно АВ, поэтому
![]() .
.
2. Момент силы F2
относительно точки А положительный,
так как эта сила стремится вращать тело
АВ против часовой стрелки. Из
треугольника ADE плечо силы F2
равно
![]() ,
следовательно:
,
следовательно:
![]() .
.
3. Момент силы F3
относительно точки А отрицательный.
Из треугольника АКС плечо силы F3
равно
![]() ,
следовательно:
,
следовательно:
![]() .
.
4. Линия действия силы
F4 пересекает центр моментов,
значит,
![]() .
.
Задача 2. Определить реакции в опорах А и В балки (рис. 2.3). Опора А шарнирно-неподвижная. Исходные данные приведены в табл. 2.1.
Задача 3. Определить реакции в опорах А и В балки (рис. 2.4). Опора В шарнирно-неподвижная. Исходные данные приведены в табл. 2.1.
Задача 4. Определить реакции и момент заделки в точке А консольной балки (рис. 2.5). Исходные данные приведены в табл. 2.1.

Рис. 2.3

Рис. 2.4

Рис. 2.5
При решении задач 2, 3, 4, 6 учащимся необходимо приобрести навыки определения реакций опор, так как с этого начинается решение многих задач по сопротивлению материалов и деталям машин.
Указания. Для равновесия тела, находящегося под действием плоской системы сил, необходимо и достаточно, чтобы соблюдалось одно из следующий условий:
● первое (основное):
![]() ,
,
![]() ,
,
![]()
или в упрощенной форме записи:
![]() ,
,
![]() ,
,
![]() ; (2.2)
; (2.2)
● второе:
,
![]() ,
,
![]() , (2.3)
, (2.3)
причем ось Ox не должна быть перпендикулярна прямой AB;
● третье:
,
,
![]() , (2.4)
, (2.4)
здесь любые три точки А, В, С не должны лежать на одной прямой.
В формулах (2.2), (2.3) и
(2.4):
![]() — суммы проекций всех сил, действующих
на тело соответственно осям Оx и Оy;
— суммы проекций всех сил, действующих
на тело соответственно осям Оx и Оy;
![]() ,
,
![]() ,
,
![]() ,
,
![]() — суммы моментов всех сил относительно
точек О, А, В, С.
— суммы моментов всех сил относительно
точек О, А, В, С.
Пример. На горизонтальную балку АВ (рис. 2.5), заделанную в стену в точке А действует сила Р1 = 400 Н, приложенная в точке В под углом = 120°, сила P2 = 100 H и момент М = 3000 Н·м. На участке ВС действует равномерно распределенная нагрузка интенсивностью q = 250 Н·м. Определим реакции в заделке, если а = 6 м, в = 4 м, l = 2 м.
Решение. Заменим распределенную нагрузку q сосредоточенной силой Q, приложенной посередине участка ВС и равной
![]()
Силу P1 разложим на составляющие:
![]()
![]()

Рис. 2.6
Решим задачу аналитическим
методом. Составим расчетную схему,
освободившись от связи-заделки, заменив
ее вертикальной реакцией
![]() ,
горизонтальной реакцией
,
горизонтальной реакцией
![]() и моментом заделки МЗ (рис.
2.6). Задача статически
определима. Направим оси координат и
составим уравнения равновесия:
и моментом заделки МЗ (рис.
2.6). Задача статически
определима. Направим оси координат и
составим уравнения равновесия:
;
![]() ; (1)
; (1)
;
![]() ; (2)
; (2)
;
![]() . (3)
. (3)
Уравнение (1) позволяет определить момент заделки:
![]()
Из (2) находим горизонтальную реакцию:
![]()
Из (3) определяем вертикальную реакцию:
![]()
Выполним проверку, составив сумму моментов относительно точки В:
;
![]() ;
;
![]() ,
,
![]() .
.
Следовательно, задача решена верно.
Задача 5. Определить усилия натяжения S1 и S2 в нитях АВ и ВС, к которым подвешен груз силой тяжести G (рис. 2.7). Исходные данные приведены в табл. 2.1.

Рис. 2.7
Указания. Рассмотрим геометрический (графический) метод решения задач. При решении задач этим методом необходимо придерживаться следующей последовательности:
1. Выделить тело (или точку), равновесие которого следует рассмотреть.
2. Изобразить все активные (заданные) силы, действующие на выделенное тело.
3. Освободить это тело от наложенных на него связей, заменив их действие реакциями связей. Составить векторное уравнение равновесия плоской системы сходящихся сил:
![]() . (2.5)
. (2.5)
4. Построить замкнутый силовой многоугольник (или треугольник, если действуют три силы). При этом следует сначала сложить все заданные, а затем достроить неизвестные силы.
Пример.
В шарнире В
кронштейна АВС
подвешен груз силой тяжести G = 100 Н.
Определим усилия в стержнях кронштейна,
если
= 110°,
![]() = 30°,
= 40°.
Стержни прикреплены к стене шарнирно.
= 30°,
= 40°.
Стержни прикреплены к стене шарнирно.
Решение.
Рассмотрим равновесие шарнира В. К
нему приложена активная сила
![]() .
Отбросим связи, заменив их реакциями
.
Отбросим связи, заменив их реакциями
![]() и
и
![]() .
Предположим, что стержень АВ растянут,
а ВС сжат. Тогда
будет направлена от шарнира В, а
— к нему. Итак, на узел В действует
система трех сходящихся сил.
.
Предположим, что стержень АВ растянут,
а ВС сжат. Тогда
будет направлена от шарнира В, а
— к нему. Итак, на узел В действует
система трех сходящихся сил.
Условие равновесия можно записать векторным уравнением:
![]() . (2.6)
. (2.6)
Для
решения применим геометрический метод.
Поскольку шарнир В находится в
равновесии, то силовой треугольник,
составленный из этих сил, должен быть
замкнут. Из некоторой точки PF
(полюса плана сил) в выбранном масштабе
 откладываем вниз вектор
,
а затем из его начала и конца проводим
прямые, параллельные направлениям
и
до их пересечения. Замерив
и
(мм) с учетом масштаба
откладываем вниз вектор
,
а затем из его начала и конца проводим
прямые, параллельные направлениям
и
до их пересечения. Замерив
и
(мм) с учетом масштаба
![]() находим
находим
![]() ,
,
![]()
![]() .
Совершая обход по треугольнику в
направлении силы
,
замечаем, что полученные направления
реакций стержней совпадают с первоначально
выбранными. Следовательно, стержень АВ
растягивается, а ВС сжимается.
.
Совершая обход по треугольнику в
направлении силы
,
замечаем, что полученные направления
реакций стержней совпадают с первоначально
выбранными. Следовательно, стержень АВ
растягивается, а ВС сжимается.
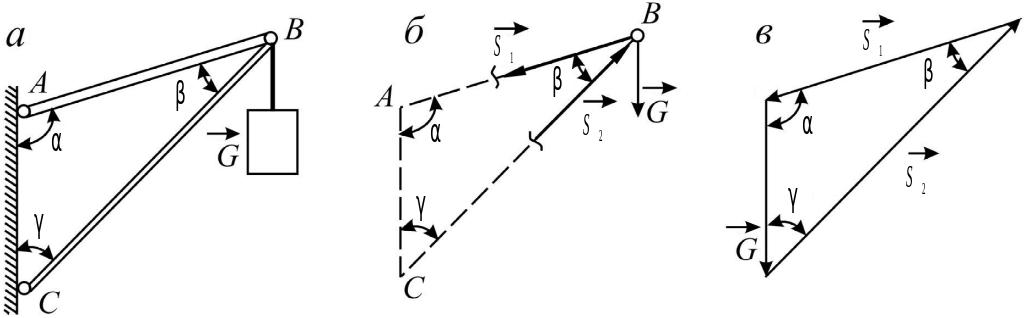
Рис. 2.8
Модули S1 и S2 можно определить также по теореме синусов:
 .
.
Откуда


Несовпадение результатов, полученных графическим и расчетным путями, не превышает 1%:
 ,
,
 .
.
Задача 6. Определить реакции опор двухопорной балки (рис. 2.9). Исходные данные — в табл. 2.2*.

Рис. 2.9
Таблица 2.2
Номер схемы |
Вариант |
М, Нм |
F, H |
q, H/м |
Номер схемы |
Вариант |
М, Нм |
F, H |
q, H/м |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
1 |
00 |
5 |
40 |
10 |
2 |
01 |
1 |
60 |
54 |
11 |
2 |
25 |
20 |
12 |
4,5 |
20 |
85 |
||
22 |
10 |
16 |
14 |
23 |
2 |
15 |
40 |
||
33 |
1,5 |
50 |
30 |
34 |
5 |
2,5 |
100 |
||
45 |
6 |
82 |
60 |
46 |
3,5 |
40 |
55 |
||
50 |
3 |
15 |
25 |
51 |
6 |
35 |
60 |
||
66 |
8 |
45 |
40 |
67 |
3 |
100 |
90 |
||
71 |
4,5 |
18 |
10 |
72 |
1,5 |
80 |
20 |
||
84 |
1 |
20 |
25 |
88 |
8 |
30 |
75 |
||
99 |
12 |
54 |
35 |
90 |
10 |
50 |
30 |
||
3 |
02 |
5 |
80 |
25 |
4 |
03 |
4 |
10 |
8 |
13 |
2,5 |
15 |
10 |
14 |
1 |
12 |
10 |
||
24 |
4 |
30 |
20 |
25 |
12 |
16 |
15 |
||
35 |
10 |
55 |
40 |
36 |
8 |
20 |
12 |
||
47 |
12 |
10 |
15 |
48 |
2 |
5 |
3 |
||
52 |
8 |
100 |
30 |
53 |
14 |
30 |
24 |
||
68 |
4,5 |
65 |
45 |
69 |
6 |
25 |
20 |
||
73 |
2 |
85 |
60 |
74 |
10 |
8 |
6 |
||
80 |
6 |
90 |
18 |
85 |
16 |
4 |
12 |
||
91 |
3,5 |
20 |
16 |
92 |
20 |
15 |
8 |
||
5 |
04 |
5 |
50 |
35 |
6 |
05 |
8 |
12 |
20 |
15 |
4,5 |
35 |
30 |
16 |
3,5 |
10 |
45 |
||
26 |
8 |
25 |
20 |
27 |
0,5 |
8 |
10 |
||
37 |
1,5 |
10 |
8 |
38 |
10 |
15 |
50 |
Окончание табл. 2.2
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
49 |
2,5 |
65 |
50 |
|
40 |
15 |
18 |
30 |
54 |
10 |
8 |
25 |
55 |
4,5 |
20 |
15 |
||
60 |
12 |
16 |
40 |
61 |
8 |
3 |
25 |
||
75 |
15 |
30 |
28 |
76 |
12 |
5 |
18 |
||
81 |
5,5 |
12 |
15 |
86 |
8,5 |
12 |
30 |
||
93 |
6 |
55 |
45 |
94 |
6 |
4 |
45 |
||
7 |
06 |
2 |
50 |
35 |
8 |
07 |
4 |
18 |
15 |
17 |
4 |
10 |
5 |
18 |
6,5 |
24 |
20 |
||
28 |
6 |
12 |
8 |
29 |
10 |
16 |
12 |
||
39 |
8 |
15 |
50 |
30 |
2,5 |
20 |
25 |
||
41 |
12 |
80 |
15 |
42 |
12 |
40 |
50 |
||
56 |
10 |
35 |
25 |
57 |
3 |
35 |
65 |
||
62 |
20 |
40 |
30 |
63 |
8 |
10 |
25 |
||
77 |
14 |
25 |
20 |
78 |
1,5 |
12 |
90 |
||
82 |
16 |
14 |
65 |
87 |
1 |
60 |
35 |
||
95 |
30 |
65 |
75 |
96 |
5 |
15 |
10 |
||
9 |
08 |
4 |
15 |
2 |
0 |
09 |
4 |
50 |
10 |
19 |
1,5 |
40 |
15 |
10 |
6 |
65 |
8 |
||
20 |
1 |
20 |
18 |
21 |
2 |
80 |
100 |
||
31 |
10 |
16 |
25 |
32 |
18 |
10 |
15 |
||
43 |
5 |
18 |
14 |
44 |
20 |
55 |
150 |
||
58 |
8 |
10 |
35 |
59 |
10 |
30 |
45 |
||
64 |
6 |
25 |
20 |
65 |
16 |
10 |
25 |
||
79 |
12 |
40 |
30 |
70 |
8 |
2 |
40 |
||
83 |
3 |
35 |
15 |
88 |
14 |
6 |
10 |
||
97 |
7 |
12 |
10 |
98 |
30 |
50 |
60 |
Указания. Последовательность решения задачи:
1. Изобразить балку вместе с нагрузками.
2. Выбрать расположение координатных осей, совместив ось x с балкой, а ось y направив перпендикулярно оси x.
3. Произвести необходимые преобразования заданных активных сил: силу, наклоненную к оси балки под углом , заменить двумя взаимно перпендикулярными составляющими, а равномерно распределенную нагрузку q – ее равнодействующей Q, приложенной в середине участка распределения нагрузки.
4. Освободить балку от опор, заменив их действие реакциями опор, направленными вдоль выбранных осей координат.
5. Составить уравнения равновесия статики для произвольной плоской системы сил таким образом и в такой последовательности, чтобы решением каждого из этих уравнений было определение одной из неизвестных реакций опор.
6. Проверить правильность найденных опорных реакций по уравнению, которое не было использовано при решении задачи.
Пример. Определим реакции опор балки (рис. 2.10, а).
Р
Рис. 1
1. Изобразим балку с действующими на нее нагрузками (рис 2.10).
2. Проведем оси координат x и y.
3. Силу F заменяем
ее составляющими
![]()
![]() и
и
![]() .
Равнодействующая сила
.
Равнодействующая сила
![]() от равномерно распределенной нагрузки
q приложена в середине участка
CD в точке K (рис. 2.10, б) и равна
от равномерно распределенной нагрузки
q приложена в середине участка
CD в точке K (рис. 2.10, б) и равна
![]() .
.
4
Рисунок 2.10
5. Составляем уравнения равновесия статики и определяем неизвестные реакции опор.

Рис. 2.10
Из уравнения суммы моментов всех действующих на балку сил, составленного относительно одной из точек опор, определяем одну из известных вертикальных реакций:
![]() ;
;
 .
.
Определяем другую вертикальную реакцию:
![]() ;
;
![]()
Определяем горизонтальную реакцию:
![]()
6. Проверяем правильность найденных результатов:
![]() .
.

Рис. 2.11
Условие равновесия выполняется, следовательно, реакции опор найдены верно.
Так как в результате решения искомые реакции получились положительными то, следовательно, предварительное направление их выбрано правильно.
Задача 7. Определить реакции стержней АВ и СВ, удерживающих грузы F1 и F2 . Массой стержней можно пренебречь (рис. 2.11). Данные для расчета по схемам 1 – 0 приведены в табл. 2.3.
Таблица 2.3
Номер схемы |
F1 |
F2 |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
||
Вариант |
кН |
||||||||||
00 |
01 |
02 |
03 |
04 |
05 |
06 |
07 |
08 |
09 |
0,4 |
0,5 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
0,3 |
0,8 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
0,6 |
0,4 |
30 |
31 |
32 |
33 |
34 |
35 |
36 |
37 |
38 |
39 |
0,2 |
0,5 |
40 |
40 |
41 |
42 |
43 |
44 |
45 |
46 |
47 |
48 |
0,5 |
0,8 |
50 |
48 |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
0,8 |
0,4 |
60 |
60 |
63 |
61 |
66 |
64 |
67 |
65 |
69 |
68 |
0,4 |
0,2 |
70 |
75 |
71 |
76 |
72 |
77 |
73 |
78 |
74 |
79 |
1,2 |
0,8 |
80 |
85 |
81 |
86 |
82 |
87 |
83 |
88 |
84 |
89 |
0,8 |
1,0 |
90 |
91 |
92 |
93 |
94 |
95 |
96 |
97 |
98 |
99 |
0,9 |
0,6 |
Пример. Груз весом P = 60 кН подвешен при помощи каната, перекинутого через небольшой блок A и идущего к лебедке D. Определим усилия в стержнях AC и BA крана. Углы, определяющие направления стержней и каната, заданы на рис. 2.12.
Решение.
Рассмотрим равновесие узла A, к
которому приложены сила
![]() реакции стержней AC и AB и сила
натяжения каната AD. Обозначим реакцию
стержня AB через
,
реакцию стержня AC через
и силу натяжения каната AD через
реакции стержней AC и AB и сила
натяжения каната AD. Обозначим реакцию
стержня AB через
,
реакцию стержня AC через
и силу натяжения каната AD через
![]() .
.

Рис. 2.12
Реакции стержней и направим вдоль этих стержней от узла A; сила направлена, очевидно, вдоль каната от A к D, так как он растянут. Кроме того, T = P, так как при отсутствии трения в блоке натяжение каната, перекинутого через этот блок, во всех точках одинаково.
Так как узел A находится в равновесии под действием сил , , , , то можно составить два уравнения равновесия этой системы сходящихся сил.
Выберем оси координат, как указано на рис. 2.12, найдем проекцию каждой силы на эти оси и составим два уравнения равновесия, приравнивая к нулю сумму проекций всех сил на каждую из координатных осей:
![]()
![]() , (1)
, (1)
![]()
![]() . (2)
. (2)
Из уравнения (2) находим:

![]()
Теперь из уравнения (1) получаем:

Так как полученное значение силы отрицательно, то сила имеет направление, противоположное направлению, выбранному на рис. 2.12, т. е. она направлена от С к А, и, следовательно, стержень АС сжат.
Задачу можно решить и геометрически, построив замкнутый многоугольник сил , , , (рис. 2.13). Составим векторное уравнение равновесия плоской системы сил:
+ + + = 0. (2.7)

Рис. 2.13
Отложим из полюса
плана сил PF (точки а)
в масштабе

![]() последовательно векторы сил
и
.
последовательно векторы сил
и
.
Направления сил и найдем после того, как обойдем периметр построенного силового многоугольника, причем направление этого обхода определяется направлением известных сил и .
Измерив стороны cd и ad силового многоугольника выбранной единицей масштаба, найдем величину искомых сил и . Так как углы между силами , , , заданы, то можно найти углы силового многоугольника, а затем вычислить и длины двух неизвестных его сторон. В самом деле, из построения силового многоугольника следует, что:
![]()
а потому
![]() .
.
Если соединим точки a и c, то треугольник abc будет равнобедренным, так как P = T, а потому
 .
.
Отсюда следует, что
![]() и
и
![]() .
.
Применяя теперь к треугольнику acd теорему синусов, получим:
 ,
,
откуда
 а
а

Чтобы определить, будут ли стержни AB и AC сжаты или растянуты (рис. 2.12), перенесем векторы и из силового многоугольника (рис. 2.13) на стержни AB и AC, тогда сила будет направлена к узлу A, а сила от него, а потому стержень AC сжат, а AB растянут.
Задача 8. На вал жестко насажены шкив и колесо, нагруженные, как показано на рис. 2.14. Определить силы F2 , Fr2 = 0,4F2 , а также реакции опор, если значение силы F1 задано. Данные для вариантов — в табл. 2.4.
Указания. Для равновесия тела в пространстве необходимо и достаточно чтобы суммы проекций всех сил на координатной осях Оx, Оy, Оz и суммы моментов всех сил относительно трех координатных осей равнялись нулю:
![]() (2.8)
(2.8)
![]() (2.9)
(2.9)
В упрощенной форме эти условия записываются так:
![]() (2.10)
(2.10)
![]() (2.11)
(2.11)
![]() (2.12)
(2.12)
![]() (2.13)
(2.13)
![]() (2.14)
(2.14)
![]() (2.15)
(2.15)
Последовательность решения.
1. Изобразить тело (вал), равновесие которого рассматривается, с действующими на него активными силами и реакциями опор и выбрать систему осей координат.
2. Из условия равновесия вала, имеющего неподвижную ось, определить силу F2, после чего вычислить значение силы Fr2 .
3. Составить шесть уравнений равновесия.
4. Решить уравнения и определить реакции опор.
5. Проверить правильность решения задач.


![]()




Рис. 2.14
Таблица 2.4
Номер схемы |
Вариант |
F1 , Н |
Номер схемы |
Вариант |
F1 , Н |
Номер схемы |
Вариант |
F1 , Н |
Номер схемы |
Вариант |
F1 , Н |
1 |
00 |
1050 |
2 |
01 |
1670 |
3 |
02 |
825 |
4 |
03 |
750 |
12 |
667 |
13 |
1250 |
14 |
850 |
15 |
1900 |
||||
24 |
834 |
25 |
2200 |
26 |
720 |
27 |
1780 |
||||
31 |
1335 |
32 |
1580 |
33 |
2500 |
34 |
1110 |
||||
42 |
1580 |
43 |
534 |
44 |
4160 |
45 |
1550 |
||||
53 |
1400 |
54 |
3320 |
55 |
1480 |
56 |
390 |
||||
69 |
1000 |
68 |
4540 |
67 |
1050 |
66 |
595 |
||||
70 |
1500 |
71 |
1385 |
72 |
2280 |
73 |
1410 |
||||
83 |
567 |
88 |
790 |
84 |
875 |
89 |
4160 |
||||
98 |
1035 |
99 |
1140 |
90 |
2050 |
91 |
240 |
||||
5 |
04 |
3650 |
6 |
05 |
280 |
7 |
06 |
1140 |
8 |
07 |
400 |
17 |
3400 |
16 |
595 |
18 |
500 |
19 |
1600 |
||||
28 |
2320 |
29 |
1000 |
20 |
3620 |
21 |
1810 |
||||
35 |
2080 |
36 |
2400 |
37 |
2600 |
38 |
1850 |
||||
46 |
1035 |
47 |
830 |
48 |
1590 |
49 |
6000 |
||||
57 |
1670 |
58 |
600 |
59 |
1500 |
50 |
3340 |
||||
65 |
520 |
64 |
670 |
63 |
1870 |
62 |
1780 |
||||
74 |
700 |
75 |
1880 |
76 |
3830 |
77 |
1140 |
||||
80 |
2130 |
85 |
1870 |
81 |
2250 |
86 |
2000 |
||||
92 |
1260 |
93 |
990 |
94 |
2940 |
95 |
4100 |
||||
9 |
08 |
1315 |
0 |
09 |
590 |
9 |
51 |
4300 |
0 |
52 |
1450 |
10 |
2380 |
11 |
1000 |
61 |
3320 |
60 |
1530 |
||||
22 |
3420 |
23 |
1200 |
78 |
2440 |
79 |
6000 |
||||
39 |
8340 |
30 |
5820 |
82 |
1870 |
87 |
2880 |
||||
40 |
2320 |
41 |
2540 |
96 |
2500 |
97 |
500 |
Пример. На вал (рис. 2.15, a) жестко насажены шкив 1 и колесо 2. Определим силы F2, Fr2 = 0,4F2, а также реакции опор А и В, если F1 = 100 H, d1 = 0,3 м, d2 = 0,1 м.

Рис. 2.15
Р
Рисунок 2.15
1. Изображаем вал со всеми действующими на него силами, а также оси координат (рис. 2.15, б).
2. Определяем F2 и Fr2. Из условия равновесия вала, имеющего неподвижную ось, следует:


3. Составим шесть уравнений равновесия:
![]()
![]() (1)
(1)
![]()
![]() (2)
(2)
![]()
![]() (3)
(3)
![]()
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
4. Решаем уравнения (1 – 4) и определяем реакции опор:
из (1)

из (2)

из (3)

из (4)

5. Проверяем правильность найденных реакций опор.
Используем уравнение (5):
![]() .
.
Следовательно, реакции RAx и RBx определены верно.
Используем уравнение (6):
![]() .
.
Следовательно, реакции RAy и RBy определены верно.
____________