

2. Основы матричной оптики
В данном разделе мы рассмотрим, каким образом можно применить матрицы для описания геометрического построения изображений в центрированной системе линз, т.е. в системе, состоящей из последовательности сферических поверхностей, центры которых расположены на одной оптической оси. Все результаты будут справедливы в рамках следующих приближений:
длина волны света считается пренебрежимо малой и распространение света можно описать с помощью отдельных лучей;
будем рассматривать лишь параксиальные лучи, - лучи, которые при своем прохождении через оптическую систему остаются близкими к ее оси симметрии и почти параллельными ей.
В дальнейшем мы будем рассматривать получение лучей, лежащих в плоскости YZ в непосредственной близости от оси OZ. Ось OZ совпадает с оптической осью системы, а ось OY расположена в плоскости страницы и направлена вверх.
Траектория луча, поскольку он проходит через различные преломляющие поверхности системы, будет состоять из последовательности прямых линий. Каждая из этих прямых определяется координатами одной принадлежащей ей точки и углом, который составляет данная линия с осью OZ. Для оценки координат и углов вводится понятие опорной плоскости.
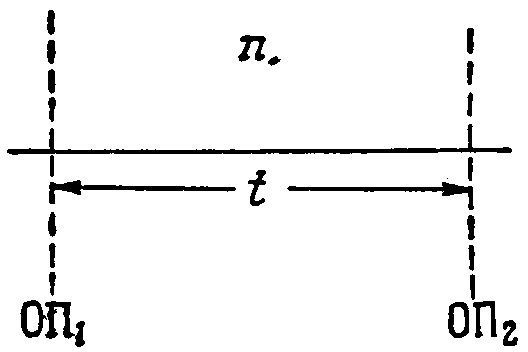
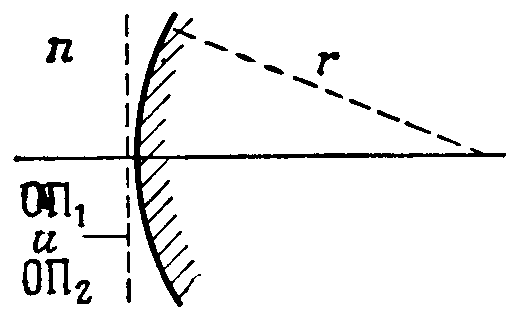
Опорная плоскость (ОП) – произвольная плоскость перпендикулярная оси OZ. Луч можно определить по отношению к ОП двумя параметрами: высотой (y), на которой этот луч пересекает ОП, и углом (v), который он составляет с осью OZ. Угол v измеряется в радианах и считается положительным, если он соответствует вращению против часовой стрелки от положительного направления оси Z к направлению, в котором свет распространяется вдоль луча (рис.1).
|
|
Рис.1 |
|
На каждом этапе расчетов выбирается новая ОП. В этом случае, параметры луча непрерывно переносятся с одной ОП на другую, по мере того как мы рассматриваем различные элементы системы. Если требуется выполнить полные расчет системы в целом, то возникает вопрос о полной матрице преобразования лучей, которая преобразовала бы все необходимые параметры луча от выбранной нами входной ОП непосредственно к выбранной выходной ОП.
Для проведения расчетов удобно заменить угол луча соответствующим ему оптическим направляющим косинусом V=n (или, точнее говоря, V=n sin), где n – показатель преломления среды, в которой распространяется луч.
В таблице 1 приведены матрицы преобразования лучей, соответствующие наиболее часто встречающимся оптическим элементам.
Табл.1
№ |
Описание |
Оптическая схема |
Матрица преобразования лучей |
1 |
Перемещение в свободном пространстве (Т-матрица) |
|
|
2 |
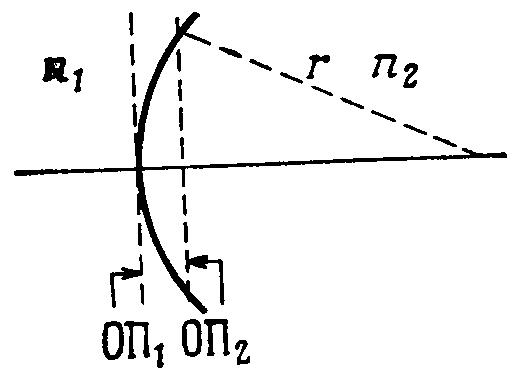
Преломление на одной поверхности (R-матрица) |
|
|
3 |
Отражение от одной поверхности |
|
|
4 |
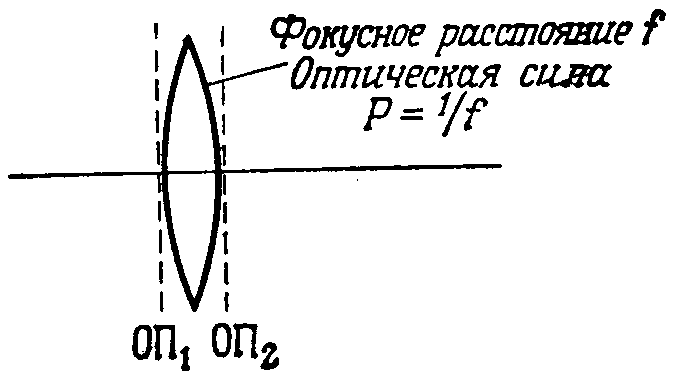
Тонкая линза в воздухе (фокусное расстояние F, оптическая сила Р) |
|
|
5 |
Преобразования луча между двумя главными плоскостями системы линз в воздухе (фокусное расстояние F) |
|
|
6 |
Преобразование луча между фокальными плоскостями системы линз в воздухе (фокусное расстояние F) |
|
|
7 |
Преобразование луча между двумя сопряженными плоскостями оптической системы (поперечное увеличение m и фокусное расстояние F) |
|
|
8 |
Афокальная система с поперечным увеличением m |
|
|
Таким образом, каждому элементу оптической системы можно поставить в соответствие свою унимодулярную матрицу преобразования лучей. Для того, чтобы получить общую матрицу преобразования лучей, описывающую всю оптическую систему в целом, следует перемножить в правильной последовательности все матрицы элементарных перемещений и преломлений, встречающихся в системе. Если
|
|
матрица системы, полученная в результате всех преобразований, то следует проверить, равен ли ее определитель единице, а затем использовать ее в уравнении преобразования луча
|
(13) |
 .
.