

Перерегулирование (σ- сигма)определяется выражением:
σ =

где ∆У1 и ∆У2 определяются по графику

По выше произведенным расчетам:
при D<0 ∆У2= ехр(0,5AK t12),
∆У1= значение функции при t = 0.
Перерегулирование определяется по формуле: σ = ехр(0,5AK t12)*100% / Y(0).
при D>0 ∆У2= Ymax (t)
∆У1= Y(0)
Перерегулирование определяется по формуле: σ = Ymax (t)*100% / Y(0).
Качество регулирования считается удовлетворительным, если перерегулирование не превышает 30...40%, а хорошим, если превышает 20%.
Затухание (пси), определяется выражением:
Ψ = 1 -

При незатухающем колебательном процессе коэффициент затухания равен нулю. Если же коэффициент затухания стремится к единице, то переходный процесс будет апериодическим. Интенсивность затухания колебаний в системе считается удовлетворительной, если степень затухания составляет 75 % и выше. В некоторых случаях допускается около 60 %.
Числовой пример смотрите /2 стр. 101 /, /7 практическая работа № 4/
4.3.5. Определение коэффициента качества системы регулирования.
Для определения коэффициента качества системы необходимо воспользоваться аналитическим выражением:
К =

где h(t) – функция ошибки.
Чтобы упростить вычисления интеграла, коэффициент качества системы можно определить с учетом построенного графика переходного процесса. Для этого площадь, ограниченную функцией переходного процесса, замените площадью треугольников S1,S2,… (т.е. сколько получится). /2 рис.П.20/

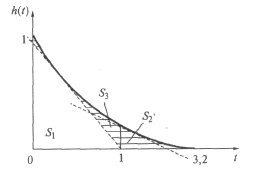 рис.П.20
рис.П.20
Площадь треугольника можно вычислить по формуле:

где а – основание прямоугольного треугольника, h – его высота. Их значения берутся из графика (измерьте линейкой). Или по формуле:

р – полупериод, a,b,c – длины сторон треугольника.
Коэффициент качества системы определите по формуле: K=S/ tper
Числовой пример смотрите /2 стр. 289 /, /7 практическая работа № 5/
4.4. Построение частотных характеристик устройств системы, объекта регулирования и всей системы.
Прежде чем построить амплитудно-частотную характеристику (АФХ) устройства системы регулирования (датчика, регулятора, исполнительного механизма, объекта регулирования), эту характеристику нужно определить. Аналитическое выражение вектора АФХ любого устройства системы регулирования легко получить через передаточную функцию этого звена, заменив в ней оператор Лапласа р на выражение iω, где ω – частота колебаний, ω = 2π/Т; Т –период колебаний, а затем записать вектор АФХ в виде суммы проекций на действительную и мнимую оси.
Для определения частотной характеристики объекта регулирования произведите замену в передаточной функции объекта р = iω. Сделав замену, получите частотную характеристику объекта регулирования.
Wор(iω) = 1/ iω,
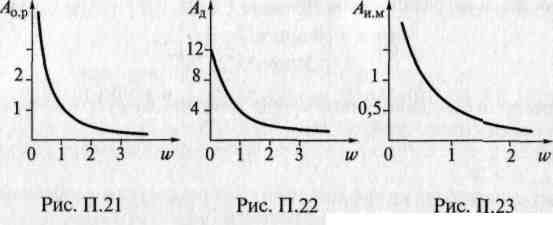
Aор(ω) = 1/ ω (5)
Подставляя в формулу (5) различные значения ω, вычислите Aор(ω) и постройте график.
Для определения частотной характеристики датчика произведите замену в передаточной функции датчика р = iω. Для выделения действительного и мнимого значений необходимо умножить числитель и знаменатель на комплексно-сопряженное значение знаменателя. В результате получим действительную и мнимую части.
Далее определим модуль, полагая, что
Aд(ω) = (а2 + b2)1/2 ,
где а равно действительной части, b равно мнимой части (здесь при записи значения b символ i опускается). Подставьте в формулу вместо а и b свои значения и решите это уравнение.
При решении уравнения в числителе нужно выделять квадрат числа, используя формулу: (x+y)2= x2 + 2*x*y +y2 . Это необходимо для того, чтобы из этого выражения в дальнейшем извлечь квадратный корень. Выражение, корень квадратный из которого не вычисляется, принимается равным единице и при построении графика не рассматривается. В результате частотная характеристика датчика будет описываться выражением, в котором:
числитель – это выражение, извлеченное из подкорня;
знаменатель – это знаменатель передаточной функции, умноженный на комплексно-сопряженное значение.
Подставляя в результирующую формулу различные значения ω, вычислите Aд(ω) и постройте график.
Для определения спектральной характеристики цепи обратной связи — ДРИМ — воспользуйтесь выражением: A (ω)ос = Aд(ω) * Aр(ω) * Aим(ω).
Здесь необходимо для каждого текущего значения ω определять ординаты в частотных характеристиках датчика, регулятора и исполнительного механизма и перемножать их. В результате этого действия получите определенные значения A (ω)ос, которые оформите в виде таблицы:
w………..0,5 1 2 3 4 5 6 7
А………..2,1 0,8 0,4 0,25 0,21 0,18 0,15 0,12
По этим значениям постройте частотный спектр цепи обратной связи /2 рис. П.25/.

Для построения частотной характеристики всей системы следует учитывать функциональную связь:
Aс(ω) = A0(ω)/(1+ A0(ω)* Aо.с(ω)
Аналогично ДРИМ подставьте текущие значения частоты в это выражение и определите значения ординат спектральной характеристики системы, постойте график.
Числовой пример смотрите /2 стр. 289 - 293 /, /7 практическая работа № 6/
4.5. Определение устойчивости системы.
Устойчивость системы можно определить двумя способами:
по положению корней характеристического уравнения на координатной плоскости (критерий Ляпунова);
по кривой годографа (критерий Найквиста).
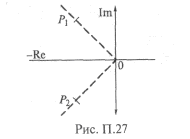
4.5.1. Определение параметров устойчивости системы по критерию Ляпунова.
Для определения устойчивости системы по положению корней р1 и р2 используется квадратное уравнение знаменателя упрощенной временной функции переходного процесса (пункт 4.3.3).
Выпишите это уравнение, определите корни квадратного уравнения р1 и р2 по формуле:
P1,2
=
По критерию Ляпунова, если два значения находятся в отрицательной плоскости относительно оси Im, система устойчива /2 рис. П.27/.
Числовой пример смотрите /2 стр. 293 /, /7 практическая работа № 7/
4.5.2. Построение годографа.
Для определения устойчивости системы по кривой годографа используйте критерий Найквиста. Для этого воспользуйтесь выражением передаточной функции всей системы (пункт 4.3.2). Выпишите это уравнение. В общем виде знаменатель передаточной функции системы (характеристическое уравнение передаточной функции системы) имеет вид:
anpn +an-1pn-1 +…+a1p + a0 + 0.
Заменив в этом уравнении оператор Лапласа р на выражение iω в соответствующей степени, получают аналитическое выражение вектора, который делят на действительную и мнимую части:
an(iω)n + an-1(iω)n-1+…+ a1(iω)+a0=M(iω)=m(ω)+in(ω).
Здесь m(ω) или Re(ω) – действительная часть, а in(ω) или Im(ω) – мнимая часть. При делении аналитического выражения вектора на действительную и мнимую части в первую — попадают члены с четной степенью, так как i2= 1, i4 = +1, i6 = 1, а в последнюю — с нечетной, так как i1 = i, i 3= i, i 5= i.
В нашем случае n равно четырем (n=4), следовательно,
Re(ω) = a4ω4 – a2 ω2 ± a0, (6)
Im(ω) = a3ω3 + a1ω (7)
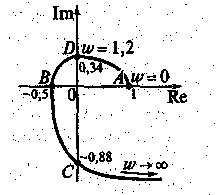
Для определения реперных точек годографа приравняйте мнимую часть к нулю и определите частоты: ω1 и ω2. Положим Im=0, тогда a3ω3 + a1ω = 0 или ω( a3ω2 + a1) = 0. Решите это уравнение и получите корни. Из этого выражения следует, что ω1 = 0. a3ω2 + a1 = 0, a1 = a3ω2, ω2 = (a1/ a3) ½
Подставьте значения этих частот в выражение действительной части характеристического уравнения и вычислите по формуле (6), чему равняется Re(0) и Re((a1/ a3) ½).
Re(0) = значение, это точка А на горизонтальной оси системы координат.
Re((a1/ a3) ½) = значение, это точка В на горизонтальной оси системы координат /2 рис.1.32 г/.
Далее определите частоты при условии, что действительная часть равна нулю: Re(ω) = 0 или a4ω4 – a2 ω2 ± a0 = 0. Введите новую переменную ω2 = х, получите квадратное уравнение. Решите это уравнение и определите корни х1 и х2. ω1 = (х1) ½, ω2 = (х2) ½
По аналогии, подставьте значения этих частот в выражение мнимой части характеристического уравнения и вычислите по формуле (7), чему равняется Im(ω1) и Im(ω2).
Im(ω1) = значение, это точка С на вертикальной оси системы координат.
Im(ω2) = значение, это точка D на вертикальной оси системы координат. /2 рис.1.32 г/.
Если при решении квадратного уравнения получается так, что оно имеет мнимые корни, то это значит, что годограф не пересекает мнимую ось.
На плоскости системы координат отразите найденные точки с указанием, к какой частоте они принадлежат.
Соедините реперные точки, двигаясь в сторону увеличения частоты ω. Таким образом, получается кривая, которую описывает конец вектора на комплексной плоскости при изменении частоты ω от 0 до ∞ – годограф вектора. Согласно критерию Найквиста кривая не должна пересекать ось Rе в отрицательной полуплоскости за пределами точки (-1,/0).
Числовой пример смотрите /2 стр. 293 - 295 /, /7 практическая работа № 7/
5. Структура пояснительной записки курсового проекта.
Пояснительная записка оформляется в соответствии со Стандартом (организации) предприятия СТП 02 2010 /8/
и должна быть следующей:
титульный лист (приложение 7.1);
задание на выполнение курсового проекта; (приложение 7.2);
содержание;
техническое задание и исходные данные (приложение 7.3);
введение;
расчетная часть;
заключение;
список литературы;
приложения
Задание на выполнение курсового проекта является вторым листом пояснительной записки и выполняется на специальном бланке.
Содержание включает введение, наименование всех разделов и подразделов с указанием номеров страниц, на которых размещается начало материала.
Техническое задание и исходные данные.
Техническое задание - общие исходные требования к проекту.
Исходные данные – статические характеристики основных звеньев системы, полученные методом проб и ошибок и соответствующие им передаточные функции, выбранные из справочных данных системы (см. методические указания по выполнению курсового проекта).
Во введении рассматриваются общие вопросы теории автоматического управления, формулируется цель курсового проекта.
Расчетная часть содержит пункты технического задания, логическое обоснование полученного результата.
В заключении необходимо сделать соответствующие выводы: достигнута ли поставленная цель, что нового узнал или изучил студент при выполнении курсового проекта и т.д.
В список литературы включаются все источники, которые следует располагать в алфавитном порядке фамилии автора. Сведения о книгах (монографиях, учебниках, справочниках и т.д.) содержат: фамилию и инициалы автора, заглавие книги, место издания, издательство, год издания, количество страниц в книге.
При ссылке в тексте на источник информации следует приводить порядковый номер по списку литературы, заключенный в косые скобки, например /1/.
Приложения – графики (см. содержание курсового проекта – графическая часть), выполненные на миллиметровке с соответствующими надписями, либо в графическом пакете AutoCAD, Компас.
6. Литература
Основная:
Гальперин М.В. Автоматическое управление: Учебник. – М.:ФОРУМ:ИНФРА-М, 2008. – 224с.: ил. – (Серия «Профессиональное образование»)
Горошков Б.И. Автоматическое управление: Учебник для студентов учреждений СПО – М.:ИРПО: Издательский центр «Академия», 2008. – 304
Шишмарев В.Ю. Автоматика: Учебник для сред. Проф. Образования / Владимир Юрьевия Шишмарев. – М.: Издательский центр «Академия», 2009. – 288 с.
Дополнительная:
Головенков С.Н., Сироткин С.В. Основы автоматики и автоматического регулирования станков с программным управлением: Учебник для машиностроительных техникумов. – 2-е изд., перераб. и доп. – М.: Машиностроение, 2008. – 288 с.: ил.
Капустин Н.М. Автоматизация машиностроения: Учеб. для втузов / Н.М. Капустин, Н.П. Дьяконова, П.М. Кузнецов; Под ред. Н.М. Капустина. – М: Высш. шк., 2008. – 223 с.: ил.
Староверов А.Г. Основы автоматизации производства: Учебное пособие для средних учебных заведений. – М.: Машиностроение, 2009. – 312 с.: ил.
Методическая:
Методические рекомендации по выполнению практических работ по дисциплине «Автоматическое управление».
Стандарт (организации) предприятия СТП 02 2010.
Приложение 7.1
Министерство труда, занятости и социальной защиты Республики Татарстан
Государственное бюджетное образовательное учреждение
среднего профессионального образования
«Технический колледж»
220301 «Автоматизация технологических процессов»
Дисциплина: «Автоматическое управление»
КУРСОВОЙ ПРОЕКТ
На тему: «________________________________________________________»
Проектировал студент _____ курса, ___________________________________
Ф.И.О.
Шифр ____________________________________________________________
Руководитель проекта _______________________________________________
Должность, звание Ф.И.О.
Консультант _______________________________________________________
Должность, звание Ф.И.О.
К защите Защита принята с оценкой
«___»____________ 20__г. _____«____»______ 20__г.
_______________________ _______________________
Подпись Подпись
Набережные Челны
2012
Приложение 7.2
Министерство труда, занятости и социальной защиты РТ
Государственное бюджетное образовательное учреждение
среднего профессионального образования
«Технический колледж»
«Утверждаю»
Зам. директора по УПР
__________Щербакова С.Л..
«___»___________201__г
Задание
на выполнение курсового проекта
Дата выдачи задания__________________________________________________
По курсу____________________________________________________________
____________________________________________________________________
студенту ________________________________курса______ группы _________
Тема задания:________________________________________________________
____________________________________________________________________
Исходные данные:
____________________________________________________________________
Рекомендуемая литература_____________________________________________
____________________________________________________________________
Срок сдачи работы Консультант
_________________ __________________
Набережные Челны, 2012 год
Приложение 7.3
Техническое задание
I. Определение устойчивости системы по статическим характеристикам
Построить статические характеристики устройств системы управления.
Определить графическим методом общую статическую характеристику цепи обратной связи — ДРИМ.
Построить статические характеристики объекта регулирования и системы управления.
Определить на графиках рабочую точку и угол между статическими характеристиками.
Рассчитать динамический коэффициент регулирования D = ΔУ/ΔХ и определить коэффициент Ко.с. для цепи обратной связи с целью выравнивания масштабов.
Определить аналитическое выражение регулирующей системы — ДРИМ.
По аналитическому выражению построить график статической характеристики — ДРИМ.
Найти аналитическим способом рабочую точку — пересечение статических характеристик ДРИМ и объекта.
II . Расчет динамических параметров системы
Выбрать передаточные функции элементов системы.
Определить передаточную функцию системы.
Найти временную функцию переходного процесса.
Определить основные параметры переходного процесса.
Определить коэффициент качества системы регулирования.
III. Построение частотных характеристик устройств и системы
Построить частотные характеристики устройств: объекта регулирования, датчика, регулятора, исполнительного механизма, ДРИМ, всей системы.
IV. Определение устойчивости системы
Определить параметры устойчивости системы.
Построить годограф.
Приложение 7.4
График выполнения курсового проекта
№ п/п |
Задание |
Кол-во часов |
I. Определение устойчивости системы по статическим характеристикам |
8 |
|
1 |
Подобрать статические характеристики устройств системы управления: датчика, регулятора, исполнительного механизма из предложенного набора, которые смогут обеспечить стабильную рабочую точку системы в статическом режиме. Для этого необходимо выполнить следующее:
Только после получения хорошей устойчивости системы и соответствия аналитического выражения ДРИМ с графиком ДРИМ можно приступать к выполнению дальнейших пунктов технического задания. |
|
2 |
Рассчитать динамический коэффициент регулирования D = ΔУ/ΔХ и определить коэффициент Ко.с. для цепи обратной связи с целью выравнивания масштабов. |
|
3 |
Найти аналитическим способом рабочую точку — пересечение статических характеристик ДРИМ и объекта. |
|
II . Расчет динамических параметров системы |
6 |
|
1 |
Выбрать передаточные функции элементов системы |
|
2 |
Определить передаточную функцию системы |
|
3 |
Найти временную функцию переходного процесса |
|
4 |
Определить основные параметры переходного процесса |
|
5 |
Определить коэффициент качества системы регулирования |
|
III. Построение частотных характеристик устройств и системы |
6 |
|
IV. Определение устойчивости системы |
4 |
|
1 |
по критерию Ляпунова |
|
2 |
по кривой годографа (по критерию Найквиста) |
|
V. Оформление пояснительной записки |
6 |
|
Итого |
30 |
|
После каждого раздела необходимо показать результаты расчетов преподавателю и получить подпись