4.3. Расчет динамических параметров системы.
4.3.1. Выбор передаточных функций элементов системы.
Выберите передаточные функции элементов системы. Для определения передаточной функции всей системы необходимо по справочным данным выбрать передаточные функции датчика, регулятора и исполнительного механизма (они выбираются в соответствии со статическими характеристиками основных звеньев системы и должны быть записаны в исходных данных, эти формулы просто нужно переписать оттуда).
Передаточная функция объекта регулирования дана в задании и определяется выражением:
Если проанализировать функцию, то можно сделать вывод, что для любого N передаточная функция объекта регулирования будет иметь вид:
Wо.р
(p)
=

Передаточная функция датчика -
Передаточная функция регулятора -
Передаточная функция исполнительного механизма –
(в формулах вместо N подставьте свое значение и вычислите коэффициенты)
4.3.2. Определение передаточной функции системы.
Определите передаточную функцию системы. В начале определите передаточную функцию обратной связи (Wо.с), для ее определения необходимо воспользоваться формулой:

Подставив выражения передаточных функций в эту формулу, получите передаточную функцию обратной связи (Wо.с).
Для определения передаточной функции системы воспользуйтесь выражением:
Подставьте сюда все составляющие передаточные функции, преобразуйте выражение. В результате передаточная функция системы будет описываться выражением, в котором:
числитель – это знаменатель передаточной функции обратной связи;
знаменатель – выражение, равное р * на знаменатель передаточной функции обратной связи + числитель передаточной функции обратной связи.
Числовой пример выполнения пунктов 4.3.1.- 4.3.2. смотрите /2 стр. 285,286/, /7 практическая работа № 5/
4.3.3. Нахождение временной функции переходного процесса.
Найдите
временную функцию переходного процесса
и постройте график переходной функции
системы.
Для этого необходимо упростить
выражение передаточной функции системы.
Целесообразно исключить из выражения
передаточной функции в числителе
третью
и вторую степени р, а в знаменателе
четвертую и третью. Для дальнейшего
исследования передаточная функция
системы будет иметь вид:
вторую степени р, а в знаменателе
четвертую и третью. Для дальнейшего
исследования передаточная функция
системы будет иметь вид:
числитель – коэффициент*р (может быть и свободный член);
знаменатель – квадратное уравнение
В знаменателе квадратное уравнение необходимо преобразовать: коэффициент при р2 должен быть =1, поэтому все составляющие выражения передаточной функции системы нужно разделить на этот коэффициент.
Числовой пример смотрите /2 стр. 286 /, /7 практическая работа № 5/
Процесс построения переходных функций системы регулирования по передаточным функциям имеет в теории управления важное значение. По этим характеристикам определяются все параметры системы и качество регулирования.
Для построения переходных функций системы регулирования по передаточным функциям необходимо применять обратное преобразование Лапласа или воспользоваться табличными значениями преобразования. Чтобы осуществить это обратное преобразование, необходимо сложную передаточную функцию заменить суммой нескольких простых функций.
В общем случае передаточная функция системы определяется по формуле:
 (1)
(1)
Если разложить ее на составляющие, то она принимает вид:
 (p)
=
(p)
=
 (2)
(2)
Корни квадратного
уравнения знаменателя, т.е.
 определяются
по формуле:
определяются
по формуле:
 (3)
(3)
Здесь
запись
 – корень квадратный из выражения
– корень квадратный из выражения ,
а само это выражение является дискриминантом
квадратного уравнения, т.е.
,
а само это выражение является дискриминантом
квадратного уравнения, т.е.
D = .
В зависимости от значения дискриминанта D = возможны три случая:
D > 0;
D = 0;
D < 0.
1. При D > 0 получим два разных корня с действительными значениями р1
и р2. Квадратное уравнение примет вид:
 (4)
(4)
и тогда передаточная функция системы запишется следующим образом:
 (5)
(5)
Замените это выражение суммой двух составляющих:
 (6)
(6)
Коэффициенты A и B неизвестны и должны быть определены, для этого приведите к общему знаменателю эти два слагаемых, раскройте скобки:

Сгруппируйте подобные члены и вынесите р за скобку:
 (7)
(7)
Сравнивая числители в выражениях (1) и (7), запишите систему уравнений:

 (8)
(8)
Эту систему уравнений решите относительно А и В.

Примечание: здесь и в дальнейших расчетах значения p1 и р2 – положительные числа согласно формуле (4).
подставим А во второе уравнение:
 или
или
 или
или

получим:
 (9)
(9)
найдем А:
приведем это выражение к общему знаменателю, получим:

подчеркнутые выражения сокращаются
 (10)
(10)
Примечание: Обратите внимание на то, что коэффициенты A и B не должны иметь одинаковые знаки.
Определив коэффициенты А и В, получим две составляющие:

По таблице обратных преобразований Лапласа находим:
Переходный процесс будет определяться суммой этих составляющих


или
 (11)
(11)
 (12)
(12)
Формулы (11,12) и есть временная функция переходного процесса (при D > 0), полученная путем преобразования передаточной функции системы, т.е. мы от оператора Лапласа р перешли к временной функции t.
Для построения временной функции вычислите ее значение при t =0 - Y(0) и определите максимум этой функции Ymax (t) через первую производную - Y(1) =0.
для формулы (11):
при t =0 Y(0)=A B, так как exp(0) = 1 , то exp(p1t) = 1 и exp (p2t) =1), (на рис.2 – это значение 2).
первая производная определяется следующим образом:

 (13)
(13)
перенесем выражение
 в правую часть уравнения, получим:
в правую часть уравнения, получим:
 (14)
(14)
разделим обе части уравнения (14) на одну из величин: либо на
либо на
 ,
для того, чтобы в одной из частей уравнения
получить единицу.
,
для того, чтобы в одной из частей уравнения
получить единицу.
 =1 (15)
=1 (15)
примем
 ,
тогда выражение (15) примет вид:
,
тогда выражение (15) примет вид:
 (16)
(16)
 )
)
выражение (16) примет вид: К* exp(t*(p1p2)) = 1, отсюда:
exp(t*(p1p2)) = 1/К (17)
Прологарифмируем обе части уравнения (17), получим:
t*(p1p2)*Ln(e) = Ln(1/K) (18)
Ln(e)=1, тогда t*(p1p2) = Ln(1/K), отсюда получаем:
tmax = Ln(1/K)/(p1p2) (19)
Формула (19) определяет время, когда временная функция (11) имеет максимальное значение.
Подставьте это значение (tmax) в исходное уравнение (формула 11) и определите максимум временной функции: (на рис.2 – это точка А)
Ymax (t) = A*exp(p1tmax) B*exp(p2tmax)
Построение графика осуществляйте с учетом вычисленных значений.
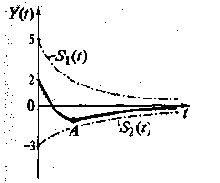 рис 2.
рис 2.
Для формулы (12) вычисления аналогичные, только изменятся знаки при коэффициентах А и В.
Числовой пример смотрите /2 стр. 95,96 /, /7 практическая работа № 4/
2. В случае D < 0, корни являются комплексными величинами р = а ± ib. Эти корни определяются выражением (3).
Здесь 4A0 >A12. Исходя из этого, можно написать:
p1=(-0,5A1 +0,5Aki) и p2=(-0,5A1 - 0,5Aki), где
 (20)
(20)
Выпишите из формулы (1) значения А0 и А1 и вычислите значение Ак по выше приведенной формуле (20).
Коэффициенты А и В в формуле (2) определяются следующим образом:
А= ;
В=
;
В=

После преобразований получим:
В= 0,5В1+
i = С0
+ iС1;
= С0
+ iС1;
А= 0,5В1- i = С0 - iС1 (21)
Из формулы (21) видно, что:
С0= 0,5*В1 (22)
С1= (В0 0,5А1В1)/Ак (23)
Выпишите из формулы (1) значения В0 и В1 и вычислите С0 и С1 по выше приведенным формулам (22, 23).
Обратное преобразование составляющих переходного процесса даст следующие выражения:

 (24)
(24)
Переходная функция будет описываться двумя гармоническими функциями (24), их можно заменить одной, если определить модуль (М) и фазу (φ) результирующего колебания.
Заменив две гармонические функции одной при условии, что
М=
 и
и
 (25)
(25)
получите временную функцию переходного процесса:
Y(t)
= 2exp(-0,5А1t)Msin(0,5Аkt+ )
(26)
)
(26)
Формула (26) и есть временная функция переходного процесса (при D < 0), полученная путем преобразования передаточной функции системы, т.е. мы от оператора Лапласа р перешли к временной функции t.
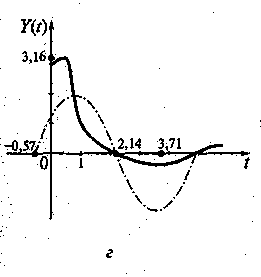
По формуле (25) определите модуль (М) и фазу (φ). Значение угла φ в формуле (25) получено в радианах. Чтобы перевести его в градусы примените формулу: 1 радиан = 1800 / π ≈ 57 0.
Запишите полученную функцию переходного процесса, подставив в уравнение (26) все вычисленные значения.
Построение графика осуществляйте с учетом реперных точек гармонической функции. Эти точки определяются выражением:
Смотри /2 рис. 1.29 в/.
Для построения временной функции рассчитайте характерные точки гармонической функции, для этого:
1. определите число радиан в фазовом угле, составив пропорцию


и решив ее относительно R

2. определите момент времени t1 когда гармоническая функция равна нулю (см. рис. 3), решив равенство:

3. второй момент времени t2 определите с помощью выражения:

4. момент времени, когда гармоническая функция имеет максимальное отрицательное значение (1), определите с помощью выражения: t12 = (t1 + t2)/2
5. момент времени, когда гармоническая функция имеет максимальное положительное значение (+1), определите с помощью выражения: t01= t12 t1
6. постройте график гармонической функции (пунктирной линией), указав на нем все вычисленные моменты времени. Y(t) = sin (0,5Ak t + φ)
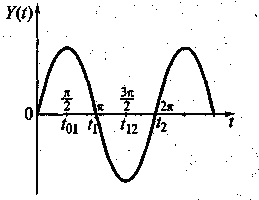 рис.3
рис.3
Аналогичным образом можно определить все моменты времени, когда гармоническая функция принимает максимальные значения. Зная эти моменты времени, можно определить амплитуды гармонического колебания.
7. определите амплитуды гармонического колебания в разные моменты времени, для этого эти моменты времени, подставьте в функцию (26). Моменты времени подставляются в выражения ехр(0,5AK t01) и ехр(0,5AK t12) и т.д.
8. вычислите значение функции при t = 0 - Y(0), (на рис 4 – это значение 3,16).
По этим данным постройте график переходного процесса.
рис 4.