

4.2.2. Построение статических характеристик устройств системы управления и объекта регулирования.
Постройте статические характеристики устройств системы управления (датчика, регулятора, исполнительного механизма) и объекта регулирования. Для этого в формулах вместо Х подставляйте любое произвольное значение и вычисляйте, чему будет равно Y. Достаточно определить две точки, чтобы построить характеристику. Обычно принимают Х=0 и еще одно какое-либо значение. Если график не выходит из нуля, то второе значение Х принимают равным тому значению, где Y обращается в ноль.
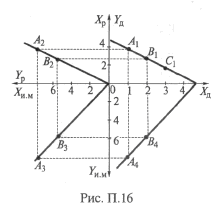
4.2.3. Определение графическим методом общей статической характеристики цепи обратной связи — дрим.
Определите графическим методом общую статическую характеристику цепи обратной связи — ДРИМ. Для этого изобразите статические характеристики этих звеньев на общей плоскости. В первом квадранте находится статическая характеристика датчика, во втором — регулятора, в третьем — исполнительного механизма /2 рис. П.16/. Для определения результирующей статической характеристики разбейте ось Хд на равные отрезки 0—1, 1—2, 2—3 и т.д. Из точек 1, 2, З и т.д. проводите перпендикуляры до пересечения с линейной статической характеристикой датчика. Получили точки А1 В1 С1, и т.д. Из этих точек проводите горизонтали до пересечения с линейной статической характеристикой регулятора в точках А2, В2, С2 и т. д. Из этих точек опустите перпендикуляры. Горизонтальное положение оси Хр меняется на вертикальное. Из новых точек проведите горизонтали до пресечения с соответствующими перпендикулярами в точках А 3, В3, С3 и т.д.
Соединяя эти точки, получите результирующую статическую характеристику обратной связи — ДРИМ.
4.2.4. Построение статических характеристик объекта регулирования и системы управления— дрим.
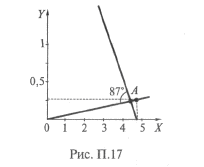
Постройте статические характеристики объекта регулирования и системы управления - ДРИМ. Для определения взаимосвязи между статическими характеристиками объекта и ДРИМ изобразите их в одной системе координат. В результате эти две статические характеристики пересекутся в точке А /2 рис. П. 17/.
4.2.5. Определение на графике рабочей точки и угола между статическими характеристиками.
Определите на графике рабочую точку и угол между статическими характеристиками. Точка пересечения двух статических характеристик: объекта и ДРИМ называется рабочей точкой, угол пересечения этих двух статических характеристик (угол наклона статической характеристики регулятора) является характеристикой устойчивости системы.
Если при пересечении двух статических характеристик получился угол 60...90°, то система характеризуется хорошей устойчивостью и вы верно подобрали статические характеристики звеньев системы, а если – нет, то необходимо вернуться к пункту 4.2.1 и проделать всю работу заново.
Для построения графиков можно использовать графические пакеты (AutoCAD, Компас), при ручном выполнении все графики выполняйте на миллиметровке и оформляйте их в пояснительной записке в виде приложений с соответствующими надписями – это графическая часть проекта.