

Содержание |
3 |
1. Цель проекта……………………………………………………………………... |
4 |
2. Общие требования к проекту и исходные данные…………………………….. |
4 |
3. Содержание курсового проекта…………………………………………………. |
5 |
4. Методические указания по выполнению курсового проекта…………………. |
5 |
4.1. Справочные данные элементов системы…………………………………….. |
5 |
4.2. Определение устойчивости системы по статическим характеристикам….. |
7 |
4.2.1. Подбор статических характеристик устройств системы управления…. |
7 |
4.2.2. Построение статических характеристик устройств системы управления и объекта регулирования……………………………………. |
7 |
4.2.3. Определение графическим методом общей статической характеристики цепи обратной связи — ДРИМ………………………… |
7 |
4.2.4. Построение статических характеристик объекта регулирования и системы управления— ДРИМ………………………………………….. |
8 |
4.2.5. Определение на графике рабочей точки и угола между статическими характеристиками…………………………………………. |
8 |
4.2.6. Определение аналитического выражения регулирующей системы — ДРИМ………………………………………………………… |
8 |
4.2.7. Расчет динамического коэффициента регулирования и определение коэффициента Ко.с. для цепи обратной связи……………………………. |
9 |
4.2.8. Нахождение аналитическим способом рабочей точки…………………. |
9 |
4.3. Расчет динамических параметров системы…………………………………. |
10 |
4.3.1. Выбор передаточных функций элементов системы…………………….. |
10 |
4.3.2. Определение передаточной функции системы………………………….. |
10 |
4.3.3. Нахождение временной функции переходного процесса………………. |
11 |
4.3.4. Определение основных параметров переходного процесса……………. |
16 |
4.3.5. Определение коэффициента качества системы регулирования………. |
17 |
4.4. Построение частотных характеристик устройств системы, объекта регулирования и всей системы……………………………………………….. |
18 |
4.5. Определение устойчивости системы………………………………………… |
20 |
4.5.1. Определение параметров устойчивости системы по критерию Ляпунова……………………………………………………………………. |
20 |
4.5.2. Построение годографа……………………………………………………... |
20 |
5. Структура пояснительной записки курсового проекта………………………... |
22 |
6. Литература………………………………………………………………………... |
23 |
7. Приложения………………………………………………………………………. |
24 |
7.1. Титульный лист курсового проекта………………………………………….. |
24 |
7.2. Задание на выполнение курсового проекта…………………………………. |
25 |
7.3. Техническое задание………………………………………………………….. |
26 |
7.4. График выполнения курсового проекта……………………………………... |
27 |
1. Цель проекта.
Закрепление студентами знаний по курсу «Автоматическое управление» и приобретение навыков по расчету основных элементов системы. Создаваемая
система автоматического регулирования должна состоять из объекта управления, датчика, регулятора и исполнительного механизма, структурная схема, которой приведена на рис 1., где ОР — объект регулирования; Д — датчик; К — усилитель; Р — регулятор; 3 — задатчик; ИМ — исполнительный механизм.
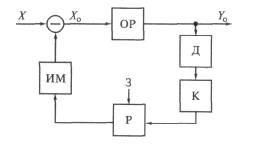 рис.1
рис.1
Элементы системы заданы статическими и передаточными функциями (справочные данные элементов системы).
Из предложенного набора датчиков, регуляторов и исполнительных механизмов необходимо выбрать те, которые смогут обеспечить стабильную рабочую точку системы в статическом режиме. Для обеспечения работы системы в динамическом режиме необходимо выбрать такое дополнительное корректирующее звено, чтобы оно обеспечивало основные параметры переходного процесса в следующих пределах:
перерегулирование — 20 %,
затухание — составляет 75 % и выше
колебательность — 2... 3 периода.
2. Общие требования к проекту и исходные данные.
В курсовом проекте должны быть выполнены следующие задания:
• Построить статические характеристики устройств системы управления.
• Определить графическим методом общую статическую характеристику цепи обратной связи — ДРИМ.
• Построить статические характеристики объекта регулирования и системы управления.
• Определить на графиках рабочую точку и угол между статическими характеристиками.
• Определить аналитическое выражение регулирующей системы — ДРИМ.
• По аналитическому выражению построить график статической характеристики — ДРИМ.
• Рассчитать динамический коэффициент регулирования D = ΔУ/ΔХ и определить коэффициент Ко.с. для цепи обратной связи с целью выравнивания масштабов.
• Найти аналитическим способом рабочую точку — пересечение статических характеристик ДРИМ и объекта.
• Выбрать передаточные функции элементов системы.
• Определить передаточную функцию системы.
• Найти временную функцию переходного процесса.
• Определить основные параметры переходного процесса.
• Определить коэффициент качества системы регулирования.
• Построить частотные характеристики устройств: объекта регулирования, датчика, регулятора, исполнительного механизма, ДРИМ, всей системы.
• Определить параметры устойчивости системы.
• Построить годограф.
Исходные данные:
N= (N— номер студента в журнале)
Статическая характеристика объекта регулирования:
ели N
– четное, Уор
=

если N – нечетное, Уор = N – X
Передаточная функция для двух объектов регулирования описывается выражением: Wо.р(p) = (N2+1)/(N2+4)p
Статические характеристики основных звеньев системы (датчика, регулятора, исполнительного механизма), полученные методом проб и ошибок и соответствующие им передаточные функции, выбранные из справочных данных системы.
(формулы записываются после выполнения пунктов 4.2.1 – 4.2.5)
3. Содержание курсового проекта.
В пояснительной записке курсового проекта должны быть отражены перечисленные ранее вопросы. Изложение каждого вопроса должно быть объяснено и обосновано согласно общей теории автоматического управления.
Графическая часть должна содержать: статические характеристики выбранных узлов системы, ДРИМ; отражать взаимосвязь статических характеристик и рабочей точки; график переходного процесса с корректирующим звеном и без него; частотные характеристики устройств: объекта регулирования, датчика, регулятора, исполнительного механизма, ДРИМ, всей системы; частотную характеристику устойчивости системы; годограф.