

9698
.pdfисогласно теореме Кронекера-Капелли система совместна. Во втором случае, когда в условии (10.3) не выполнено второе равенство, прямые параллельны, ранг расширенной матрицы больше ранга матрицы системы,
исистема несовместна.
10.2.Пучок прямых, определяемый двумя пересекающимися прямыми. Иногда при решении задач не следует спешить с нахождением точки пересечения двух прямых, решая систему уравнений (10.2), а лучше воспользоваться понятием пучка прямых, проходящих через точку пересечения этих прямых (в частности, когда нужно найти прямую, проходящую через точку пересечения данных прямых, и удовлетворяющую некоторому дополнительному условию). Уравнение пучка прямых, проходящих через точку пересечения двух заданных прямых
A1x + B1 y + C1 = 0 , |
A2 x + B2 y + C2 = 0 |
|
имеет вид |
|
|
( A1x + B1 y + C1 ) + λ( A2 x + B2 y + C2 ) = 0 . |
(10.4) |
|
Действительно, уравнение (10.4) – |
уравнение прямой. Так как точка |
|
пересечения этих прямых M 0 ( x0 , y0 ) принадлежит каждой из этих прямых, то ее координаты обращают в ноль обе скобки в (10.4), а, значит, при любом λ прямая (10.4) проходит через точку M 0 .
10.3. Расстояние от точки до прямой. Пусть требуется вычислить расстояние от точки M 0 ( x0 , y0 ) до прямой Ax + By + C = 0 .
2 |
|
0 |
d |
|
|
|
|
x |
|
|
Рис. 10.5 |
|
Пусть M 1 ( x1, y1 ) – проекция точки M 0 на прямую (см. рис. |
10.5). |
Искомое расстояние равно абсолютной величине проекции вектора |
M1M0 |
на направление нормального вектора N = { A, B } . |
|
70
|
|
UUUUUUR |
|
|
|
< N ,M |
|
M |
|
|
> |
|
|
|
|
A( x |
|
|
− x ) + B( y |
|
− y ) |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
R |
|
0 |
1 |
|
|
|
||||||||||
d = |
M1M 0 |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ПрN |
|
|
|
|
|
|
|
| N | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| N | |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
= |
|
|
Ax |
|
|
|
+ By |
|
− Ax − By |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
R |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| N | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ax1 + By1 = −C , |
|
|||||||||
Так как точка |
M 1 ( x1, y1 ) принадлежит прямой, то |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
поэтому окончательно получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
d = |
|
|
Ax0 + By0 |
|
|
+ C |
|
|
. |
|
|
|
|
|
|
|
|
(10.5) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A2 + B2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Найдём координаты точки M 1 ( x1, y1 ) . Для этого выразим вектор |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
M1M0 через найденное расстояние |
|
|
d |
|
|
|
и единичный вектор N / | N |, |
||||||||||||||||||||||||||||||||||||||||||||||
нормальный к прямой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
UUUUUUR |
= ± |
|
d |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.6) |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
M |
M |
0 |
|
|
|
R |
|
N . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
| N | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из формулы (10.5) видно, что знак проекции вектора M1M0 |
|
определяется |
|||||||||||||||||||||||||||||||||||||||||||||||||||
знаком выражения |
Ax0 + By0 + C , т.е., |
|
|
|
если |
|
|
|
|
Ax0 + By0 + C > 0 , |
то |
||||||||||||||||||||||||||||||||||||||||||
M1M 0 -- N и в формуле (10.6) нужно взять знак плюс. |
|
3x − 4y + 4 = 0 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
Пример. |
Найти проекцию точки |
|
|
M 0 (1,8) |
|
на прямую |
|||||||||||||||||||||||||||||||||||||||||||||||
Вычисляем расстояние точки |
|
|
M 0 |
до прямой |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
d = |
|
|
3 ×1 - 4 × 8 + 4 |
|
|
= |
| -25 | |
= 5 . |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 + 42 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Попутно выясняется, |
|
что |
|
|
|
|
M1M 0 -¯ N , |
|
|
поэтому |
формула (10.6) |
даёт |
|||||||||||||||||||||||||||||||||||||||||
равенство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UUUUUUR |
= {1 |
− x ; 8 − y } = − |
5 |
{3; 4}. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
M |
M |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Отсюда, приравнивая координаты векторов, получаем координаты точки
M1(4, 4) (см. рис. 10.6).
71

M 0 (1, 8)
M1 (?,?) |
N = {3; |
−4} |
|
|
Рис. 10.6
10.4. Линейные неравенства. В заключение этой лекции выясним геометрический смысл неравенства
Ax + By + C > 0 . |
|
(10.7) |
Построим прямую |
|
|
Ax + By + C = 0 |
(10.8) |
|
и нормальный к ней вектор N = { A, B } . Нас интересует множество точек |
||
M (x, y) , координаты которых удовлетворяют |
неравенству |
(10.7). |
Возьмём на прямой (10.8) произвольную, но |
фиксированную |
точку |
M 0 ( x0 , y0 ) . |
|
|
N
ϕ
 M ( x, y )
M ( x, y )
M 0
Рис. 10.7
72

Поскольку Ax0 + By0 + C = 0 , то, выражая отсюда C и подставляя в (10.7), получим, что левая часть этого неравенства (10.7) равна скалярному произведению вектора N = { A, B } на вектор M 0M
< N , M 0 M > = A(x − x0 ) + B( y − y0 ) > 0 .
Итак, неравенству (10.7) удовлетворяют все точки плоскости, для которых угол между векторами N и M 0M – острый. Из рисунка 10.7 видно, что все такие точки принадлежат одной полуплоскости. Чтобы выяснить, какая из двух полуплоскостей «отвечает» неравенству (10.7), достаточно проверить его выполнение для какой-нибудь одной точки из любой полуплоскости. Если координаты этой точки ему удовлетворяют, то и координаты всех точек полуплоскости, в которой выбрана «пробная» точка, будут его решениями, если нет – то нужная полуплоскость – другая.
Лекция 11. Плоскость
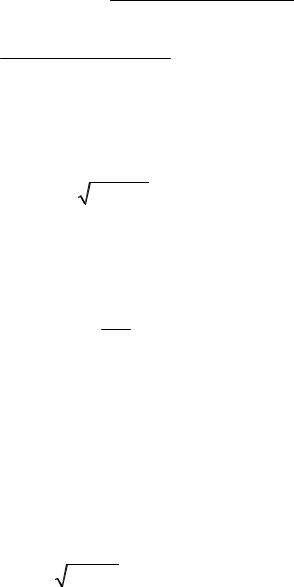
11.1. Различные виды уравнения плоскости. Перейдем теперь к изучению уравнений плоскости в пространстве. Пусть в трехмерном пространстве с декартовой прямоугольной системой координат имеем плоскость П , и мы хотим получить уравнение, связывающее координаты любой точки, принадлежащей этой плоскости.
N
M 0
 900
900
M
Рис. 11.1 |
|
Для этого зафиксируем какую-нибудь точку M 0 ( x0 , y0 , z0 ) П |
и |
возьмем вектор, перпендикулярный (ортогональный, нормальный) к этой
плоскости. Пусть это будет вектор |
N = { A, B,C} . Очевидно, что для |
произвольной точки M (x, y, z) П |
векторы M 0M = { x − x0 ; y − y0 ; z − z0 } |
и N перпендикулярны, т.е. их скалярное произведение равно нулю
73

< N , M0M > = 0
или в координатах
|
A( x − x0 ) + B( y − y0 ) + C( z − z0 ) = 0 . |
(11.1) |
Это и есть уравнение плоскости П , проходящей через заданную |
||
точку M 0 ( x0 , y0 , z0 ) |
перпендикулярно заданному вектору N = { A, B,C} . |
|
Раскрывая в (11.1) скобки, получим уравнение |
|
|
|
Ax + By + Cz + D = 0 , |
(11.2) |
где для краткости |
обозначено D = − Ax0 − By0 − Cz0 . Уравнение (11.2) |
|
называют общим уравнением плоскости. Обратим внимание, что
уравнение |
плоскости |
является линейным |
уравнением относительно |
переменных |
x, y, z , а |
коэффициенты при |
них – соответствующие |
координаты нормального вектора к этой плоскости.
Обратно, покажем, что уравнение вида (11.2) определяет плоскость
и построим её. По данным числам |
A, B,C |
построим вектор N = { A, B,C} |
|||||||||||
и введем радиус-вектор |
r = { x, y, z} . Тогда |
уравнение (11.2) можно |
|||||||||||
представить в виде |
|
|
|
|
|
|
|
|
|
R |
|
||
R |
> + D = 0 |
или |
|
|
|
||||||||
< N , r |
| N | ПрR r = −D . |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
N |
|
||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
= − |
D |
, |
|
|
|
|
||
|
|
|
|
R |
R |
|
|
|
|
||||
|
|
|
ПрN r |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
| N | |
|
|
|
|
|
|
т.е. все радиус-векторы |
R |
= { x, y,z} , |
координаты которых удовлетворяют |
||||||||||
r |
|||||||||||||
уравнению (11.2), имеют одну и ту же проекцию на вектор N = { A, B,C} . |
|||||||||||||
Это означает, что точки |
|
M (x, y, z) |
|
принадлежат |
плоскости, |
||||||||
перпендикулярной вектору |
N = { A, B,C} |
|
и отстоящей |
от начала |
|||||||||
координат на расстояние |
| p | , где |
|
|
|
|
|
|
|
|
|
|
||
|
p = − |
D |
= − |
|
|
D |
|
|
. |
|
|||
|
R |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
|
|
| N | |
|
|
|
A2 |
+ B2 + C 2 |
|
||||
Отсюда следует алгоритм построения плоскости по заданному уравнению (11.2). Через начало координат проведем прямую в
направлении вектора |
N = { A, B,C} и отложим на ней от начала координат |
||
отрезок |
OP длиной |
| p | в направлении вектора |
N = { A, B,C} , если |
p > 0 , |
или в противоположном направлении, если |
p < 0 . Через конец |
|
этого отрезка P проводим перпендикулярно ему требуемую плоскость.
74
z
P N
p |
M |
y |
|
O r
x
Рис. 11.2
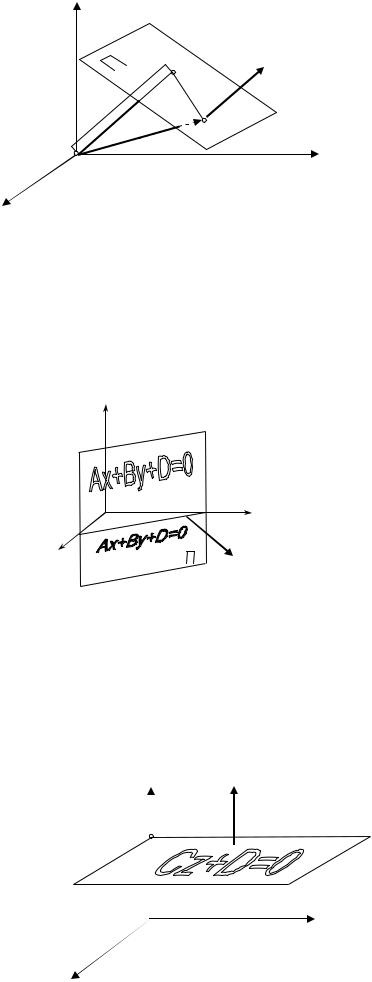
Рассмотрим некоторые частные случаи общего уравнения плоскости. Пусть один из коэффициентов перед переменными в уравнении (11.2) равен нулю (например, C = 0 ). Тогда нормальный вектор этой плоскости
N = {A, B,0}. Это значит, что он перпендикулярен оси O z , а плоскость параллельна этой оси
z
|
O |
|
y |
x |
N = {A, B,0} |
Рис. 11.3
Теперь пусть два каких-нибудь коэффициента перед переменными в уравнении (11.2) равны нулю (например, A = B = 0 ). Тогда нормальный
вектор N = {0,0,C} перпендикулярен |
плоскости xO y , а плоскость |
параллельна этой координатной плоскости |
|
z |
N = {0,0,C} |
O
y
75
x

Рис. 11.4
Рассмотрим ещё случай, когда в уравнении (11.2) D = 0 . Это означает, что точка (0,0,0) принадлежит плоскости
Ax + By + Cz = 0
или, другими словами, эта плоскость проходит через начало координат. Для наглядного представления расположения этой плоскости найдем
её следы, т.е. линии пересечения с координатными плоскостями (см. рис. 11.5).
Ax + By = 0 |
, |
Ax + Cz = 0 |
, |
By + Cz = 0 |
|||
|
z = 0 |
|
y = 0 |
|
. |
||
|
|
|
|
|
x = 0 |
||
z
y
x
Рис. 11.5
Из общего уравнения плоскости легко получить так называемое
уравнение плоскости в отрезках
|
x |
+ |
y |
+ |
z |
= 1, |
(11.3) |
|
|
a |
|
|
|
||||
|
|
b c |
|
|
||||
где (a,0,0) , (0,b,0) и (0,0,c) – |
точки пересечения |
плоскости |
с |
|||||
координатными осями. Действительно, из (11.2) следует Ax + By + Cz = −D
и далее, предполагая, что D ¹ 0 |
(т.е. плоскость не проходит через начало |
|||||||
координат) и разделив обе части этого уравнения на − D , получим |
||||||||
уравнение (11.3), в котором |
a = − |
D |
, |
b = − |
D |
и c = − |
D |
величины |
|
|
A |
|
B |
|
C |
||
|
76 |
|
|
|
|
|
|
|
отрезков, которые плоскость «отрезает» от осей координат (см. рис. 11.6).
z
c
b
y
x |
a |
|
Рис. 11.6
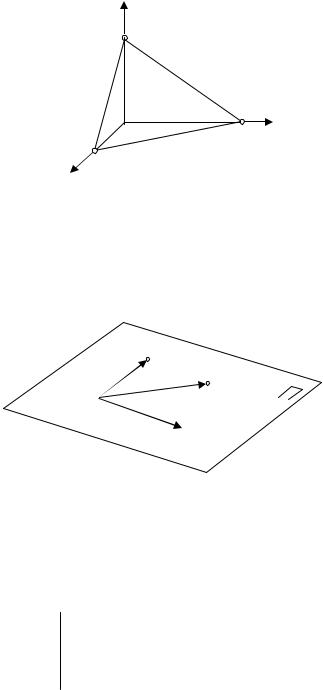
Получим уравнение плоскости, проходящей через три заданные точки M1 ( x1, y1, z1 ) , M 2 (x2 , y2 , z2 ) , M 3 (x3 , y3 , z3 ) . Пусть M (x, y, z) –
произвольная точка плоскости П .
M2
M
M1
 M3
M3
Рис. 11.7
Тогда три вектора M1M , M1M2 , M1M3 будут компланарными и, следовательно, их смешанное произведение равно нулю
x − x1 |
y − y1 |
z − z1 |
|
|
|||
x2 − x1 |
y2 − y1 |
z2 − z1 |
= 0 . |
x3 − x1 |
y3 − y1 |
z3 − z1 |
|
Раскладывая этот определитель по элементам первой строки, приведем его
клинейному уравнению относительно x, y, z вида (11.2).
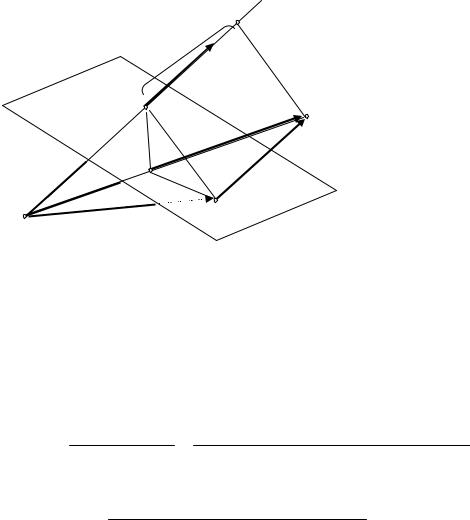
11.2.Взаимное расположение двух плоскостей. Пусть заданы две плоскости П1 и П2 уравнениями (см. рис. 11.8).
A1x + B1 y + C1z + D1 = 0 , A2 x + B2 y + C2 z + D2 = 0 .
77

a ) |
N1 |
|
b) |
|
N1 |
П2 |
ϕ |
N2 |
|
ϕ |
α |
|
|
||||
α |
|
|
|
α |
|
П |
|
|
|
П1 |
|
1 |
|
|
|
|
|
|
α |
|
|
α |
П2 |
|
|
|
|
||
|
|
|
N2 |
|
Рис. 11.8
Найдем угол между ними в предположении, что они пересекаются. Пересекаясь, плоскости образуют две пары равных двугранных углов.
Углом α между плоскостями |
|
П1 |
и П2 будем считать меньший из этих |
||||||||
двугранных углов (см. рис. 11.8). Выразим угол |
α между плоскостями |
||||||||||
через угол ϕ между нормальными к ним векторами |
N1 = { A1 , B1,C1} и |
||||||||||
N2 = { A2 , B2 ,C2} . Если угол |
ϕ острый, то α = ϕ (как углы с взаимно |
||||||||||
перпендикулярными сторонами). Если же угол ϕ |
– тупой, то α = π − ϕ |
||||||||||
(см. рис. 11.8 b) ), поэтому |
cos α = − cos ϕ . В итоге для вычисления угла α |
||||||||||
между плоскостями имеем формулу |
|
|
|
|
|
|
|||||
cos a = |
|< N 1 |
, N 2 >| |
= |
|
| A1 A2 + B1B2 + C1C2 | |
||||||
UUR |
UUR |
|
|
|
|
|
|
|
. |
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|||||||
|
| N 1 | |
×| N 2 | |
|
|
A12 + B12 + C12 |
A12 + |
B12 + C12 |
||||
В частности, условие перпендикулярности и условие параллельности двух плоскостей имеют вид
П1 П2 A1 A2 + B1B2 + С1С2 = 0 ;
П П |
2 |
|
A1 |
= |
B1 |
= |
С1 |
. |
|
|
|
||||||
1 |
|
A2 |
|
B2 |
|
С2 |
||
|
|
|
|
|
||||
В последнем случае, если дополнительно выполняется равенство
A1 |
= |
B1 |
= |
C1 |
= |
D1 |
, |
(11.4) |
|
A2 |
B2 |
C2 |
D2 |
||||||
|
|
|
|
|
то эти плоскости совпадают.
Аналогично понятию пучка прямых на плоскости существует понятие пучка плоскостей, проходящих через линию пересечения двух
78
заданных плоскостей. В частности, им удобно пользоваться, когда нужно найти плоскость, проходящую через линию пересечения данных плоскостей и удовлетворяющую некоторому дополнительному условию. Уравнение пучка плоскостей имеет вид
( A1x + B1 y + C1z + D1 ) + λ( A2 x + B2 y + C2 z + D2 ) = 0 . |
(11.5) |
Действительно, уравнение (11.5) – уравнение плоскости. Так как координаты любой точки, принадлежащей линии пересечения П1 и П2 , обращают в ноль обе скобки в (11.5), то при любом λ эта плоскость проходит через линию пересечения этих плоскостей.
11.3. Расстояние от точки до плоскости. Пусть требуется вычислить расстояние от точки M 0 (x0 , y0 , z0 ) до плоскости Ax + By + Cz + D = 0 .
d
N
M0
|
d |
O |
M 1 |
Рис. 11.9
Пусть M1 (x1, y1, z1 ) – проекция точки M 0 на данную плоскость (см. рис. 11.9). Искомое расстояние равно абсолютной величине проекции
вектора |
M1M0 на направление нормального вектора N = { A, B,C } : |
|
|||||||||||||||||||||||
|
|
UUUUUUR |
|
|< N ,M |
M |
|
>| |
|
|
|
A( x − x ) + B( y |
− y ) + C( z |
|
− z ) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
R |
|
|
|
|
R1 |
|
|
|
0 |
|
|
|
|
|
0 |
|
1 |
|
0R |
1 |
|
0 |
1 |
|
d = |
M1M 0 |
= |
|
|
|
|
|
= |
|
|
|
|
|
= |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ПрN |
|
| N | |
|
|
|
|
|
|
|
|
| N | |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
= |
|
Ax |
|
+ By |
|
+ Cz |
|
− Ax |
− By − Cz |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
0 |
R |
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| N | |
|
|
|
|
|
|
|
|
||
Так как |
точка |
|
M1 (x1, y1, z1 ) |
|
|
|
принадлежит |
|
плоскости, то |
||||||||||||||||
Ax1 + By1 + Cz1 = − D , поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
79 |
|
|
|
|
|
|
|
|
|
|
||