

6.2. Функциональная схема цифровых систем управления
Функциональная схема ЦСУ приведена на рис. 6.7, где К - коммутатор; АЦП – аналогово-цифровой преобразователь; ЦАП – цифроаналоговый преобразователь.
Функциональная схема ЦСУ в отличие от функциональной схемы непрерывной САУ содержит интерфейс ввода-вывода УВМ (коммутатор, АЦП, ЦАП, нормирующие преобразователи и т.д.). Кроме того цифровой регулятор, устройство сравнения и задающее устройство реализованы в виде программ УВМ и оперируют они только с дискретными (цифровыми) сигналами.
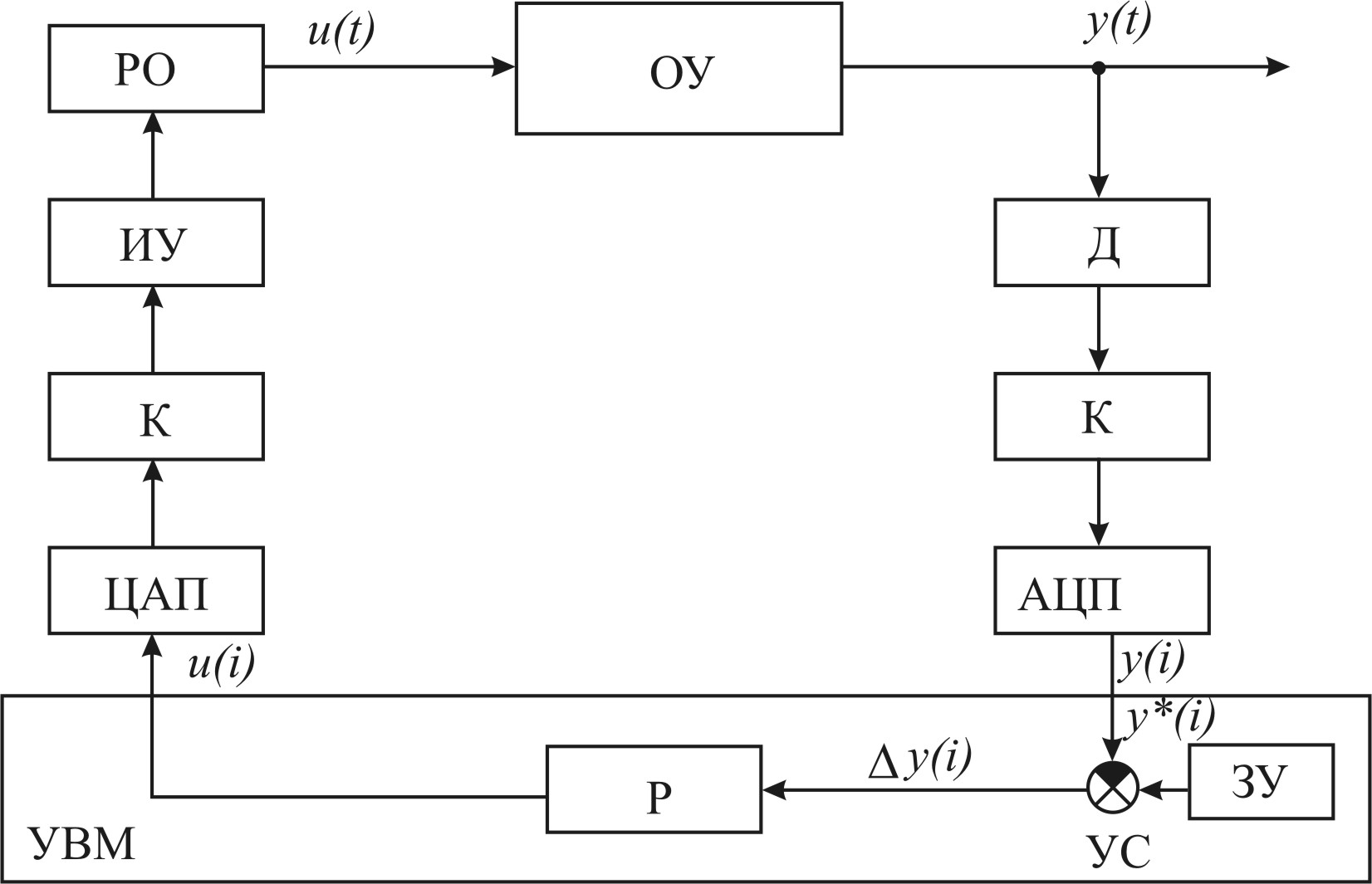
Рис. 6.7. Функциональная схема ЦСУ
6.3. Математическое описание цифровых систем управления
Поведение ЦСУ в отличие от непрерывных САУ описывается во временной области разностными уравнениями, а в частотной – дискретными передаточными функциями.
Дискретные
передаточные функции
![]() получаются на основе z-преобразования,
которое в дискретном случае играет
такую же роль, что и преобразование
Лапласа в непрерывном случае.
Z-преобразование тесно
связанно с дискретным преобразованием
Лапласа, определяемое соотношением
получаются на основе z-преобразования,
которое в дискретном случае играет
такую же роль, что и преобразование
Лапласа в непрерывном случае.
Z-преобразование тесно
связанно с дискретным преобразованием
Лапласа, определяемое соотношением
![]() ,
(6.4)
,
(6.4)
где
![]() - дискретная последовательность идеальных
импульсов (решетчатая функция), задаваемая
соотношением
- дискретная последовательность идеальных
импульсов (решетчатая функция), задаваемая
соотношением
![]() ,
(6.5)
,
(6.5)
где
![]() - смещенные дельта-функции, существующие
только в моменты времени
- смещенные дельта-функции, существующие
только в моменты времени
![]() и равные нулю при всех остальных значениях
и равные нулю при всех остальных значениях
![]() .
.
Недостатком
дискретного преобразования Лапласа
является наличия в выражении (6.4)
трансцендентного сомножителя
![]() ,
из-за которого преобразование
,
из-за которого преобразование
![]() и дискретная передаточная функция
становятся иррациональными функциями
аргумента p, что создает
значительные трудности при их
использовании.
и дискретная передаточная функция
становятся иррациональными функциями
аргумента p, что создает
значительные трудности при их
использовании.
С целью получения дискретной передаточной функции в дробно-рациональной форме, свойственной непрерывным системам, вводят замену:
![]() .
(6.6)
.
(6.6)
Тогда имеем, что
![]() ,
(6.7)
,
(6.7)
которое называется z-преобразованием дискретной последовательности.
Для
большинства встречающихся в расчетах
решетчатых функций z-преобразование
может быть выполнено при помощи таблиц
соответствия, которые приводятся в
специальной литературе по импульсным
или цифровым САУ. Например:
![]() ;
;
![]() ;
;
![]() и т.д.
и т.д.
Главное достоинство и удобство z-преобразования заключается в том, что сама запись z-изображения (6.7) указывает простой способ выполнения прямого и обратного z-преобразований.
Чтобы по известной функции времени найти её z-изображение, необходимо лишь каждое дискретное значение
 умножить на
умножить на
 ,
а затем свернуть получившийся степенной
ряд в конечную сумму.
,
а затем свернуть получившийся степенной
ряд в конечную сумму.Чтобы по известному изображению
 найти соответствующий сигнал
,
необходимо представить изображение
в виде степенного ряда по убывающим
степеням
,
получающиеся при этом числовые
коэффициенты ряда и есть дискретные
значения
сигнала
.
найти соответствующий сигнал
,
необходимо представить изображение
в виде степенного ряда по убывающим
степеням
,
получающиеся при этом числовые
коэффициенты ряда и есть дискретные
значения
сигнала
.
Свойства z-преобразования аналогичны свойствам непрерывного преобразования Лапласа. Приведем основные из них:
Свойство линейности
![]() .
.
Теорема о начальном значении оригинала:
![]() .
.
Теорема о конечном значении оригинала:
![]() .
.
Теорема запаздывания:
![]() .
(6.8)
.
(6.8)
Соотношение
(6.8) показывает, что умножение на
![]() соответствует задержке дискретного
сигнала на l интервалов
дискретизации.
соответствует задержке дискретного
сигнала на l интервалов
дискретизации.
Дискретной передаточной функцией называется отношение z-изображения выходной переменной к z-изображению входной переменной при нулевых начальных условиях:
 ,
(6.9)
,
(6.9)
т.е.
 ,
(6.10)
,
(6.10)
где
![]() - есть временная задержка на один шаг
дискретизации.
- есть временная задержка на один шаг
дискретизации.
Дискретные
передаточные функции можно непосредственно
получить по непрерывным передаточным
функциям
![]() :
:
![]() .
(6.11)
.
(6.11)
с
использованием таблиц соответствия.
Этот способ получения
![]() является точным, однако достаточно
трудоемким для САУ высокого порядка.
Поэтому в практических расчетах ЦСУ
используется приближенный метод
получения
через
,
называемый методом подстановок.
Самостоятельно получить разностные
уравнения и
для всех типовых динамических звеньев.
является точным, однако достаточно
трудоемким для САУ высокого порядка.
Поэтому в практических расчетах ЦСУ
используется приближенный метод
получения
через
,
называемый методом подстановок.
Самостоятельно получить разностные
уравнения и
для всех типовых динамических звеньев.