

5.6.3. Получение разностного уравнения на основе дифференциального уравнения
Для дифференциальных уравнений разностные уравнения получают путем замены дифференциалов левыми разностями, т.е.
![]() ;
;
Получим разностное уравнение для апериодического звена первого – порядка, имеющего дифференциальное уравнение вида:
![]() .
(5.25)
.
(5.25)
Заменив дифференциал левой разностью и введя дискретное время ti имеем, что
![]()
Умножив на t и приведя подобные имеем, что
![]() .
.
Заменив дискретное время ti на i получим разностное уравнение вида:
![]() ,
(5.26)
,
(5.26)
где a0=T+t; a1=-T; b0=kt.
Отсюда:
![]() ,
(5.27)
,
(5.27)
где
![]() .
.
5.6.4. Построение кривой переходного процесса по разностному уравнению
1. Получение разностного уравнения на основе дифференциального или интегро-дифференциального уравнения.
2. Формирование дискретных входных или управляющих воздействий путем дискретизации известных выражений входных воздействий (например: 1(t)1(i), i=0,1,2,3,…) либо заданием численных значений входных воздействий.
3. Расчет значений кривой переходного процесса по разностному уравнению.
4 Построение кривой переходного процесса по дискретному выходному воздействию y(i).
Достоинства: 1. Простота реализации на ЭВМ. 2. Возможность использования при любом типе входного воздействия.
Недостаток: Точность построения кривой переходного процесса существенно зависит от величины шага дискретизации. Поэтому предварительно необходимо решать задачу выбора оптимальной величины шага дискретизации.
6. Дискретные системы управления
6.1. Введение в теорию дискретных систем управления
В связи с интенсивным развитием вычислительной техники в промышленной автоматике все большее применение получают дискретные САУ. Основным элементом таких систем является УВМ.
В дискретных САУ один или несколько сигналов являются дискретными и представляют собой последовательности кратковременных импульсов. В состав дискретных систем наряду со звеньями непрерывного действия входят элементы, преобразующие непрерывные сигналы в дискретные и элементы, выполняющие обратные преобразования.
Преобразование непрерывного сигнала в дискретный сигнал называется квантованием. Различаются три вида квантования: по уровню; по времени; по уровню и по времени (совместно);
Квантование по уровню заключается в фиксации определенных дискретных значений непрерывного сигнала, что показано на рис 6.1. При этом непрерывный сигнал (тонкая линия) заменяется ступенчато изменяющимся сигналом (жирная линия).



Рис. 6.1. Квантование по уровню
Смежные дискретные значения отличаются друг от друга на постоянную величину х, называемую интервалом (шагом) квантования по уровню. Переход с одного уровня на другой происходит в моменты времени, когда непрерывный сигнал достигает очередного фиксированного значения. САУ, в которых реализуется только квантование по уровню называются релейными системами.
Квантование по уровню производится специальными элементами (квантователями). Простейшими квантователями являются двух- и трехпозиционные реле, которые квантуют непрерывный сигнал соответственно по двум и трем уровням. При достаточно большом числе уровней и малом интервале времени, обеспечиваемых УВМ, релейную систему приближенно можно рассматривать, как непрерывную.
Квантование по времени (дискретизация) заключается в фиксации мгновенных значений непрерывного сигнала, как показано на рис. 6.2 в равноотстоящие друг от друга дискретные моменты времени. При этом квантованный сигнал по времени представляет собой решетчатую функцию (последовательность идеальных импульсов), где t – шаг дискретизации.
САУ, реализующие квантование по времени называются импульсными системами.
Квантование по времени осуществляется с помощью импульсных элементов. Импульсный элемент преобразует непрерывный входной сигнал в последовательность импульсов, амплитуда, длительность или период повторения которых зависят от значений входного сигнала в дискретные моменты времени. Преобразующее действие квантователя можно рассматривать как процесс модуляции последовательности одинаковых импульсов по закону изменения входного непрерывного сигнала, а сам квантователь по времени – как импульсный модулятор.
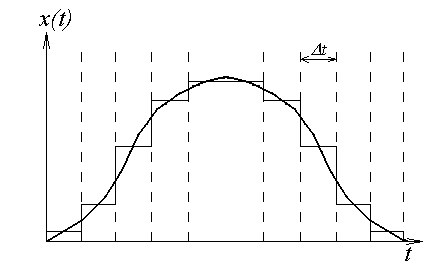
Рис. 6.2. Квантование по времени
В
зависимости от того, какой из параметров
модулируемой последовательности
импульсов изменяется по закону изменения
![]() ,
различают следующие виды модуляции:
амплитудно-импульсную; широтно-импульсную;
частотно-импульсную модуляции.
,
различают следующие виды модуляции:
амплитудно-импульсную; широтно-импульсную;
частотно-импульсную модуляции.
При амплитудно-импульсной модуляции значениям модулирующего сигнала пропорциональны амплитуды импульсов xИ, что отражено на рис. 6.3,

Рис. 6.3. Амплитудно-импульсная модуляция переменной
т.е.
![]() ;
;
![]() ;
;
![]() ,
(6.1)
,
(6.1)
где
![]() -
длительность импульсов.
-
длительность импульсов.
При широтно-импульсной модуляции (рис. 6.4) длительности импульсов зависят от значений сигнала в дискретные мгновения времени,
т.е.
![]() ,
,
![]() ,
.
(6.2)
,
.
(6.2)
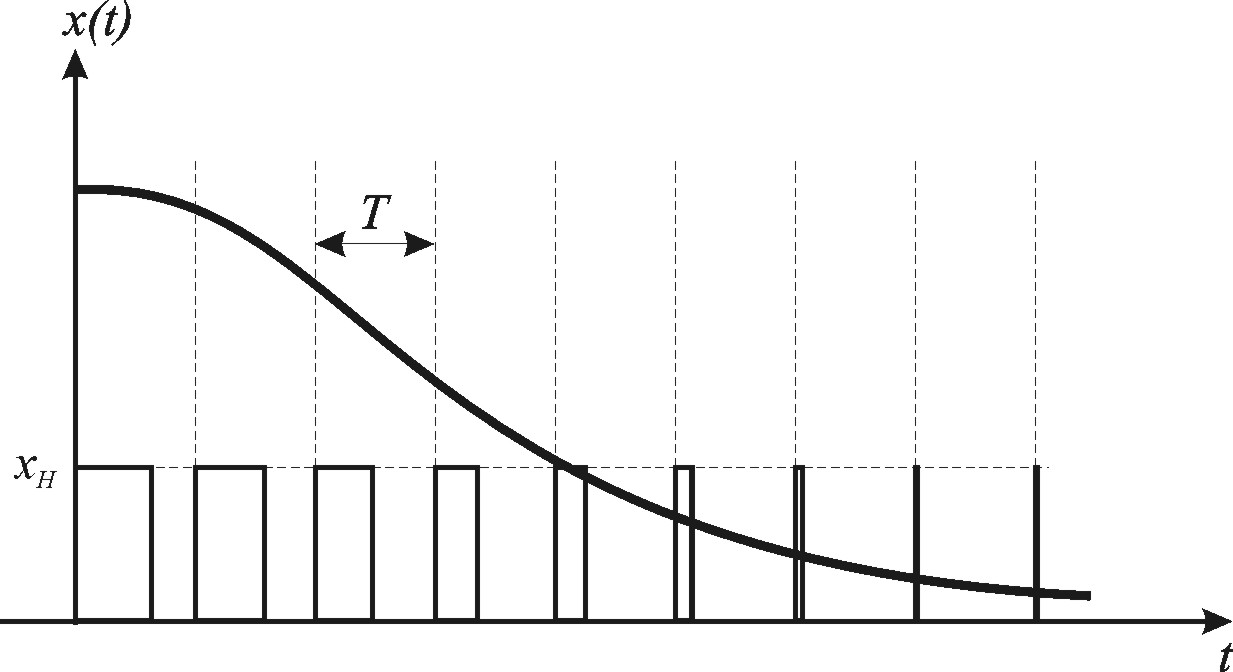
Рис. 6.4. Широтно-импульсная модуляция переменной
При частотно-импульсной модуляции (рис. 6.5) период (частота) повторения импульсов зависят от значений сигнала в дискретные моменты времени,
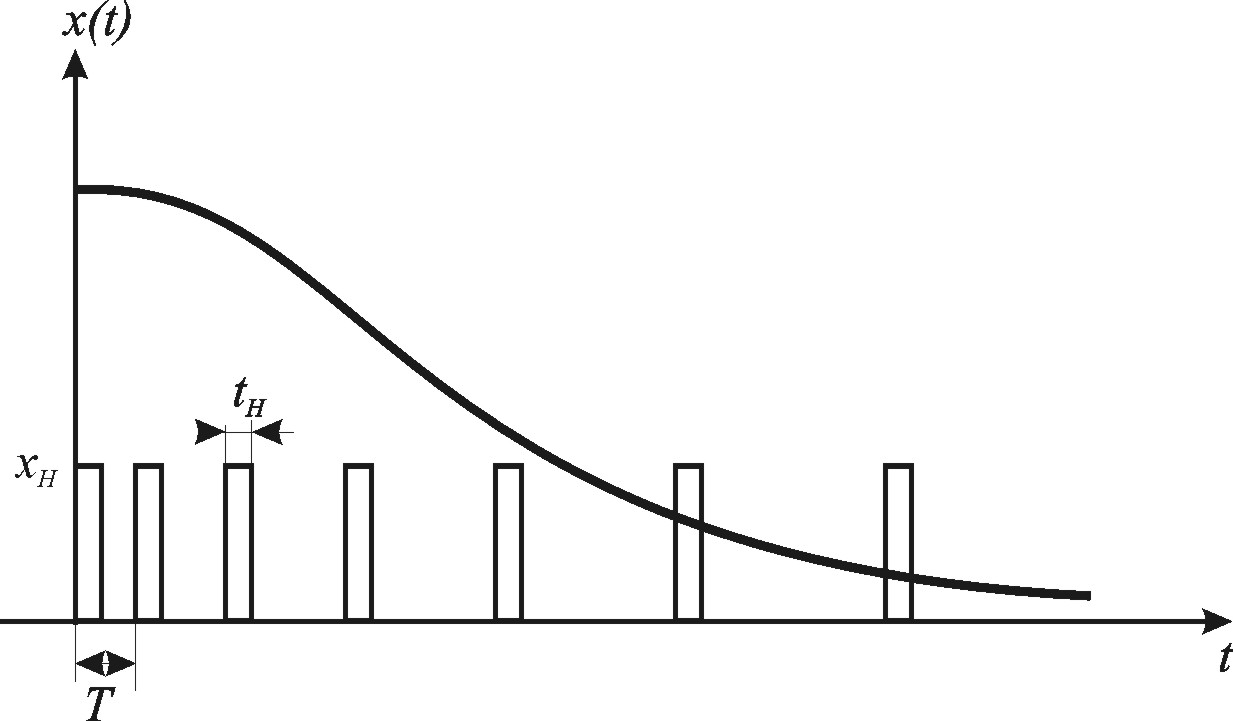
Рис. 6.5. Частотно-импульсная модуляция переменной
т.е.
![]() ;
;
![]() ;
;
![]() ,
(6.3)
,
(6.3)
где
![]() - частота дискретизации (частота
повторения).
- частота дискретизации (частота
повторения).
Из импульсных систем, в настоящее время, наибольшее распространение получили импульсные САУ с амплитудно-импульсной модуляцией.
При совместном квантовании по уровню и по времени фиксируются дискретные по уровню значения, ближайшие к значениям непрерывного сигнала в дискретные моменты времени, причем приоритетным является квантование по времени (рис. 6.6).
САУ реализующие совместное квантование по уровню и по времени называются цифровыми системами управления (ЦСУ).
Совместное квантование по уровню и по времени в ЦСУ осуществляется при помощи аналого-цифровых преобразователей (АЦП), в которых кроме указанных видов квантования происходит и кодирование дискретных значений сигналов, т.е. представление их в виде последовательности чисел и запись в каком-либо цифровом коде.
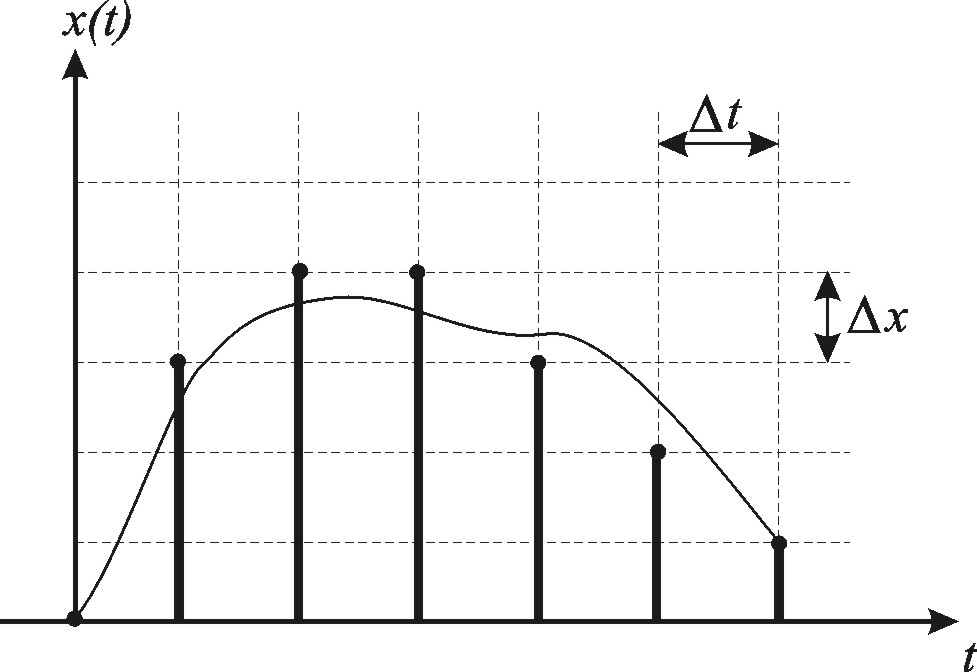
Рис. 6.6. Совместное квантование по уровню и по времени
При сравнительно большом шаге квантования по уровню ЦСУ являются существенно нелинейными, а при достаточно малом шаге дискретностью по уровню можно пренебречь и их можно рассматривать как линейные амплитудно-импульсные системы.
Дискретные системы управления с УВМ находят широкое применение в современной автоматике благодаря следующим преимуществам по сравнению с непрерывными.
Дискретное управляющее устройство можно использовать для одновременного управления несколькими однотипными объектами, для чего оно поочередно с периодом повторения Т подключается к каждому объекту.
Импульсные и цифровые элементы, входящие в дискретные системы управления, обеспечивают более высокую точность передачи и преобразования сигналов.
Системы управления, скомплектованные на основе дискретных элементов, имеют, как правило, меньшие габаритные размеры, массу, стоимость, большую надежность, лучшую защищенность от помех.
Дискретные элементы более удобны для агрегатно-блочного построения систем.
Цифровые вычислительные устройства позволяют реализовать более сложные и, следовательно, более гибкие законы управления.