

5.2. Оценка качества регулирования в переходных режимах.
Точность регулирования в переходных режимах определяется величиной динамической ошибки
![]() (5.6)
(5.6)
и длительностью ее существования. Величина и длительность динамической ошибки зависят от характера переходного процесса в системе, который в свою очередь зависит от свойств системы и места приложения внешнего воздействия.
При общей оценке качества регулирования, прежде всего, обращают внимание на форму переходного процесса. Различают следующие типовые переходные процессы, приведенные на рис. 5.2: колебательный (рис. 5.2а); монотонный (рис. 5.2б); апериодический (с перерегулированием) (рис. 5.2в). Каждый из трех типовых переходных процессов имеет свои преимущества и недостатки. Предпочтение той или иной форме переходного процесса делают с учетом особенностей объекта регулирования.
Для оценки качества регулирования используются оценки качества, которые делятся на прямые и косвенные оценки.
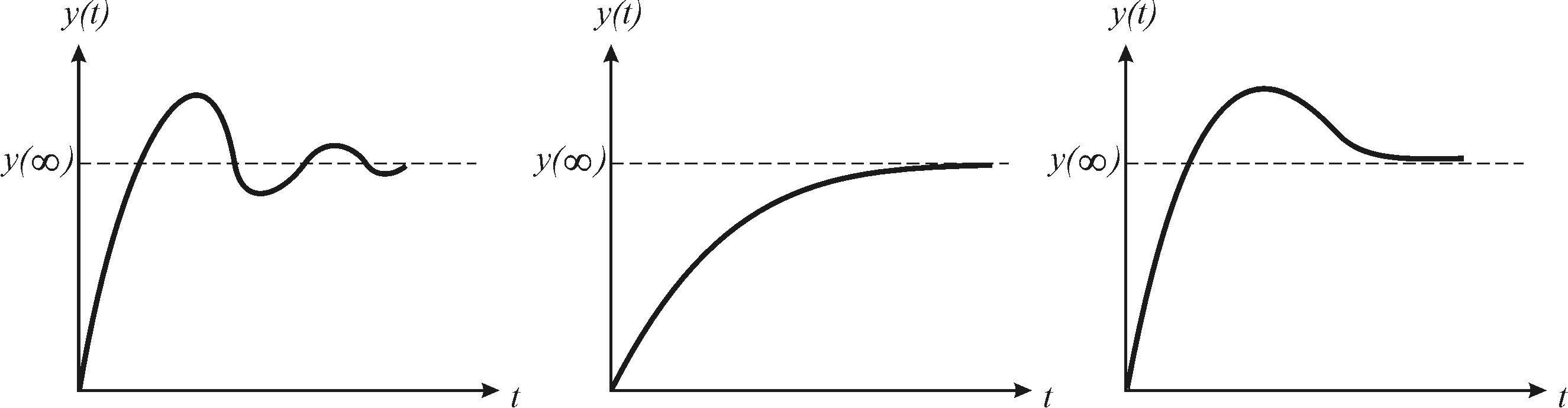
а) б) в)
Рис. 5.2. Типовые переходные процессы
5.3. Прямые оценки качества регулирования
Оценки качества, получаемые непосредственно по кривой переходного процесса называются прямыми оценками. Основные прямые оценки качества регулирования приведены на рис. 5.3.
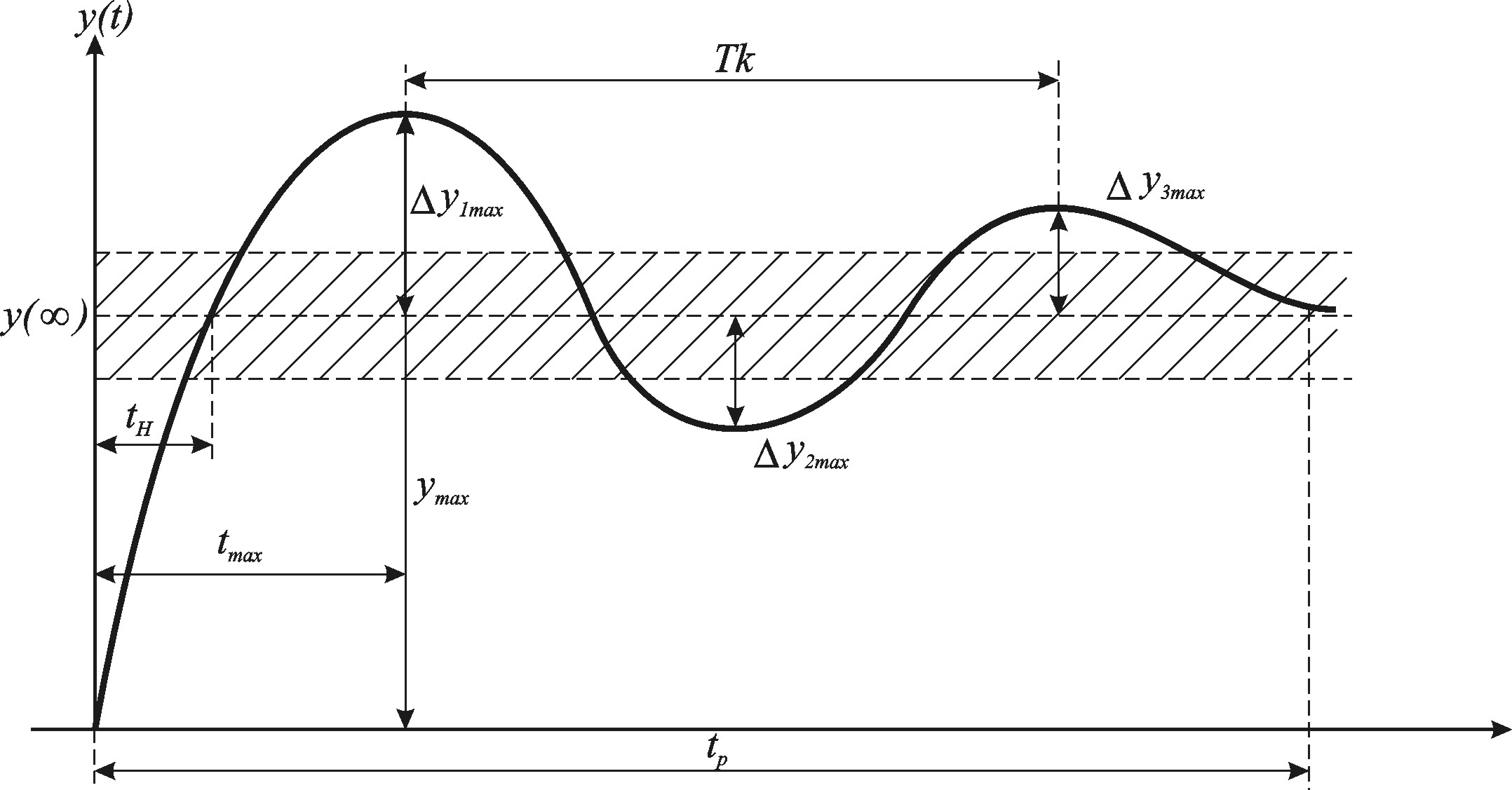
Рис. 5.3. Прямые оценки качества регулирования
Основными прямыми оценками качества регулирования являются: время регулирования; перерегулирование; число колебаний; частота колебаний.
Время регулирования tp (время переходного процесса) – минимальное время, по истечении которого регулируемая переменная будет оставаться близкой к установившемуся значению y() с заданной точностью . На практике обычно принимается равной =0,05y(), т.е. 5 от установившегося значения y(). Время регулирования характеризует быстродействие системы, т.е. быстроту реакции системы на изменение (появление) управляющих или возмущающих воздействий. Время регулирования зависит от: свойств объекта регулирования; закона регулирования; настроек регулятора.
Перерегулирование - отношение первого максимального отклонения y1max регулируемой переменной y(t) от установившегося значения y() к этому установившемуся значению, выраженное в процентах, т.е.
![]() . (5.7)
. (5.7)
Допустимое значение в каждом конкретном случае определяется на основе опыта эксплуатации. В большинстве случаев качество регулирования считается удовлетворительным, если =(1030)%. Первое максимальное отклонение y1max зависит от: динамических характеристик объекта управления; величины возмущений; настроек регулятора. Поэтому y1max также считается важной оценкой качества регулирования, которая задается обычно непосредственно в единицах измерения регулируемой переменной.
При заданных значениях tp и переходная характеристика САР не должна выходить из области допустимых отклонений, представленной на рис. 5.4.
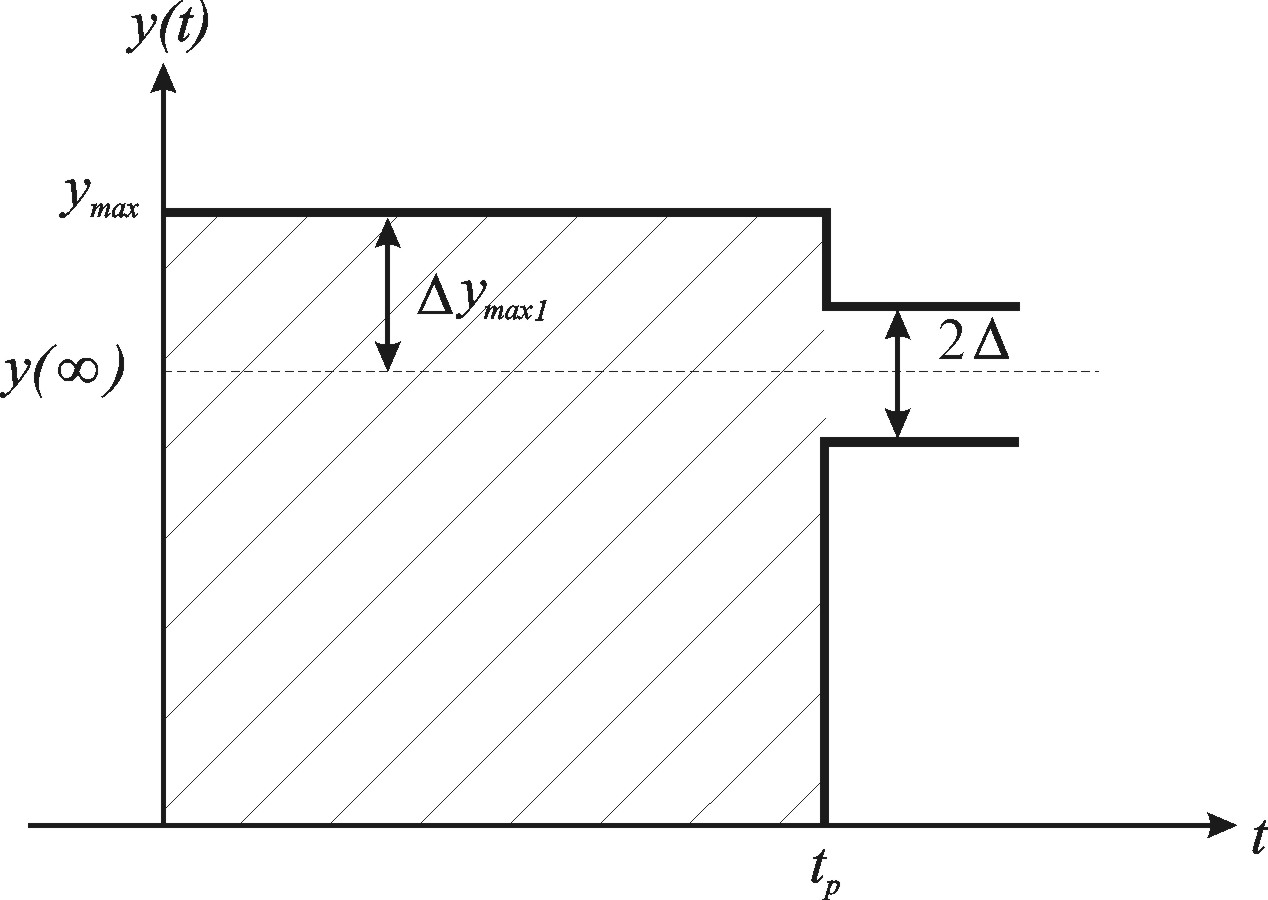
Рис. 5.4. Область допустимых отклонений
Число колебаний N регулируемой переменной y(t) за время регулирования
![]() , (5.8)
, (5.8)
где Tk – период колебаний для колебательных переходных процессов. На практике обычно принимается N 2.
Частота колебаний
![]() . (5.9)
. (5.9)
Дополнительными прямыми оценками качества регулирования являются:
- время нарастания переходного процесса tн;
- время достижения первого максимума tmax и некоторые другие.
Оценки качества регулирования выбираются в зависимости от требований, предъявляемых к САР. САР обладает необходимым качеством, если она удовлетворяет заданным условиям качества, а переходный процесс не выходит из области допустимых отклонений.