17. Состав технических средств асу тп с супервизорным управлением.
И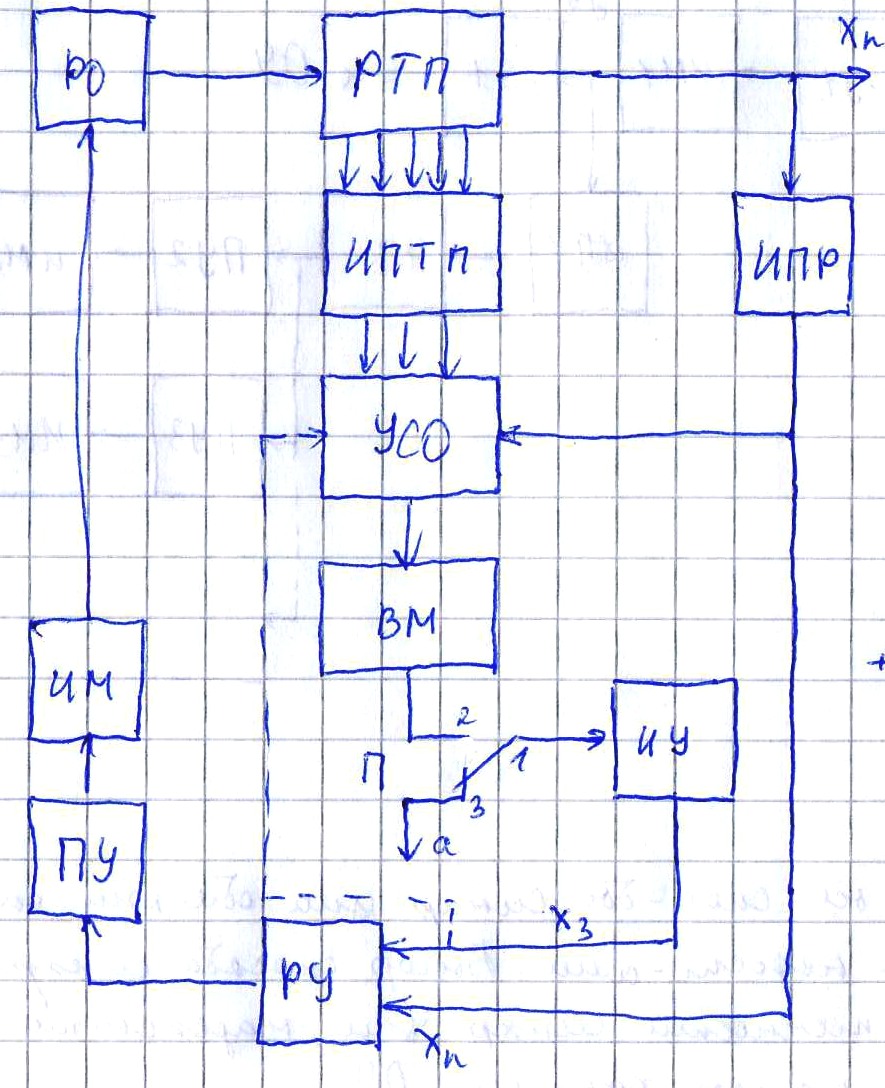 ПР
– измерительный преобразователь
регулируемого параметра, РТП –
регулируемый тех-ый процесс, ИПТП –
измерительные преобразователи
технологических параметров, УСО –
устройство связи с объектом, ВМ -
вычислительная машина. ИУ - интегрирующее
устройство. П – переключатель режимов.
ПР
– измерительный преобразователь
регулируемого параметра, РТП –
регулируемый тех-ый процесс, ИПТП –
измерительные преобразователи
технологических параметров, УСО –
устройство связи с объектом, ВМ -
вычислительная машина. ИУ - интегрирующее
устройство. П – переключатель режимов.
1-ый режим – положение переключателя П1-2 – супервизорный режим. Сигнал с выхода ВМ ч/з ИУ подается на РУ и представляет собой сигнал задания хз. Выходной сигнал либо частотно-импульсный либо широтно-импульсный. ИУ предназначено для преобразования импульсного сигнала в аналоговый для РУ.
2-ой режим- положение переключателя П1-3 – автоматический режим, сигнал задания остается постоянным либо может быть изменен вручную. Здесь осуществляется резервирование задатчика за счет обратной связи в УСО. В системе осуществляется плавный переход с ручного задания на автоматический и обратно.
18. Состав технических средств асу тп с функционально-групповым управлением.
1 -
1-ая фунциональная группа (ФГ) ОУ,
-
1-ая фунциональная группа (ФГ) ОУ,
2,3 – локальные регулирующие устройства 1-ой ФГ, 4- центральная СУ 1-ой ФГ, 5,6 –общегрупповые ИВК и УВК, 7 – ТС опер-го управления, 8 – средства связи и отображения информации. С помощью такой структуры реализуется принцип распространения функций управления, в данном случае между различными ФГ.
Достоинства – высокая живучесть, снижение общего количества технических средств.
Недостатки – высокая стоимость, невысокая надежность верхнего уровня, сложность математического, программного и информационного обеспечения.
19. Состав технических средств распределенной АСУ ТП
Распределенная АСУ ТП – это такие системы, в которых функции управления расположены в пространстве. Соответственно в таких системах used индивидуальные технические средства, помимо тех которые учитываются в централизованной АСУ ТП – средства передачи информации, приема, усиления(масштабирования), средства хранения информации. Виды распределенной АСУ ТП – кольцевая, шинные структуры, радиальные структуры, петлевая структура
Радиальная стр-ра:
Р адиальная
стр-ра АСУ ТП 1-датчик техн. пар-ов и
пар-ов тех-го об-ния. 2-исполнит. уст-во.
3-локалные с-мы контроля и упр-ия. 4-ср-во
сопряжения с верхним уровнем интерфейса.
5- центральное уст-во связи с верхним
уровнем. 6 – верхний уровень упр-ия АСУ
ТП. «+» при выходе из строя одного эл-та
с-ма в целом работоспособ-на.
адиальная
стр-ра АСУ ТП 1-датчик техн. пар-ов и
пар-ов тех-го об-ния. 2-исполнит. уст-во.
3-локалные с-мы контроля и упр-ия. 4-ср-во
сопряжения с верхним уровнем интерфейса.
5- центральное уст-во связи с верхним
уровнем. 6 – верхний уровень упр-ия АСУ
ТП. «+» при выходе из строя одного эл-та
с-ма в целом работоспособ-на.
Петлевая структура
Петлевая стр-ра 1-уст-во связи. 2-локальные подс-мы. 3-уст-во с верхним уровнем с-мы упр-ия
20. Состав технических средств одноконтурной аср
Для удобства упр-ия сложными техн. Процессами, такие процессы условно разделяют на ряд составных частей, в каждой из которых м выделить только одну регулир-ую величину.
В этом сл-е упр-ие регулир-ым пар-ом производится с пом-ю локальных одноконтурных САР.
Т.о. при таком подходе упр-ия технологическими процессами реализуется принцип локализации ф-ии управления.
Хп – регулируемый пар-р;
ЗРП – задатчик рег-го пар-ра;
КЦ – коммутатор цепей;
ИПН – измерительный преобразователь нормирующий;
ПП – первичный преобразователь;
ЗРВ – задатчик регулирующего воздействия;
ПУ – пусковое устройство;
РТП – регулируемый технологический процесс.
Если выходной сигнал ЗРП ест-ный, то между ЗРП и РУ нужно установить ИПН.
Нрмирование – процесс установления нормы для соотв-го пар-ра в реальном времени.
ГСП – гос-ая система приборов и средств автоматизации;
КЦ – предназначен для уст-ки режимов упр-ия (одна цепь для автоматического упр-ия, другая для ручного и для дистанционного упр-ия).
В состав БРУ входят др. вспом-ые устройства: индикатор…
Наличие пуск-го устройства опр-ся необх-ю согласования информационных хар-к выходного сигнала БРУ с входными пар-ми ИМ.
Это согл-ие произв-ся по амплитуде и по мощности вх-го сигнала ИМ, т.е. это усил-ль мощности.
Назначение ИМ закл-ся в преобр-ии вых-го сигнала ПУ в механическое перемещение.
РО предн-н для непоср-го возд-ия на регулируемый пар-р.
1. стабилизация РП на зад-ом ур-не.
2. программное управление (ЗРП программный) – упр-ие на основе заранее зад-ой программы изм-ия рег-го пар-ра во времени.