

28 Состав технических средств аср с синхронизацией исполнительных механизмов(сас им)
На практике используют следующие виды САС ИМ:
Последовательная схема включения
Параллельная схема включения
Последовательно – параллельная схема включения
Шаговая
Параллельная схема включения ИМ, если РУ с непрерывным выходным сигналом
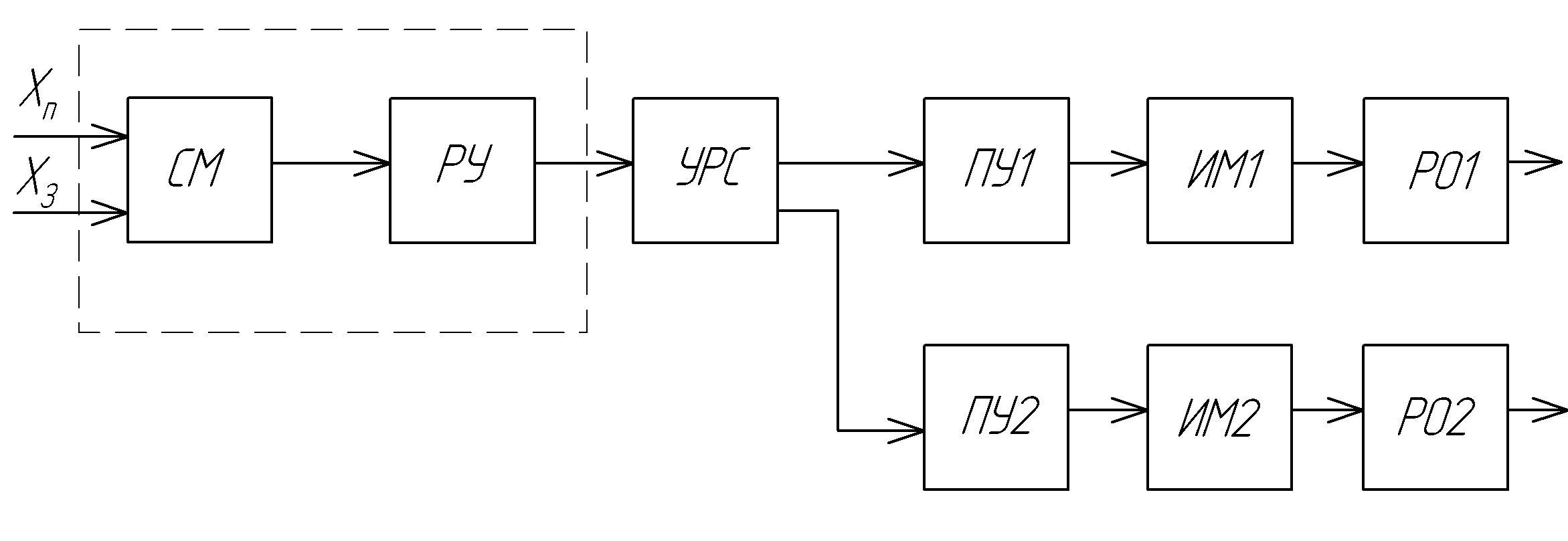
УРС – устройство размножения сигнала
Параллельная синхронизация с релейно-импульсным регулятором и ИМ-ом постоянной скорости
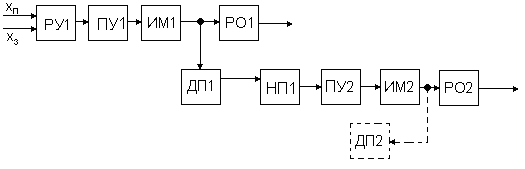
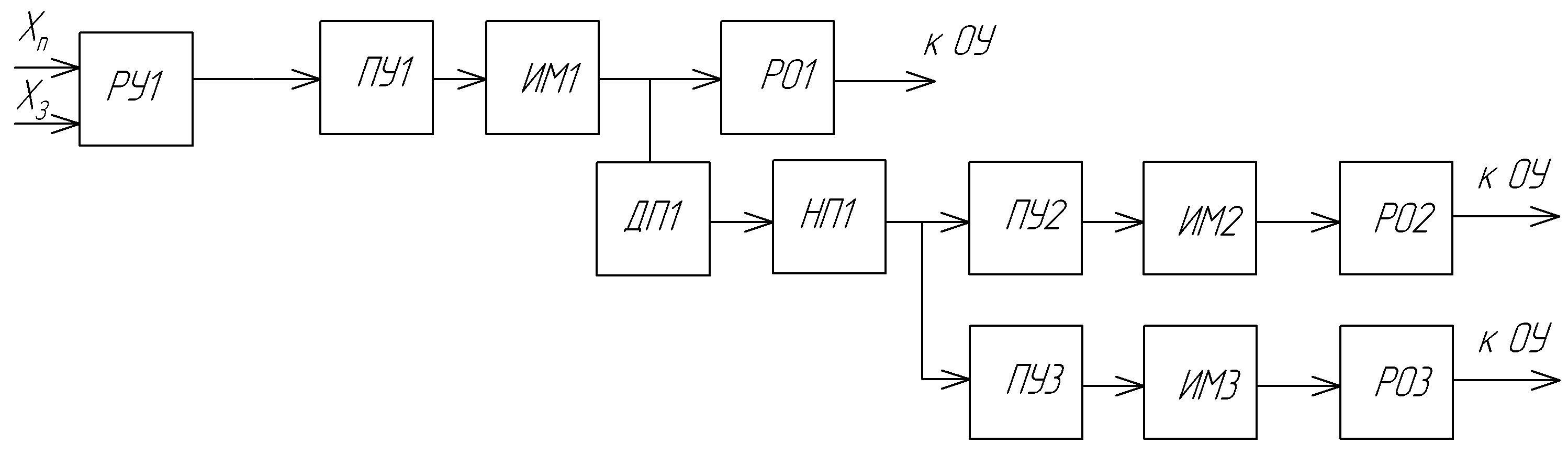
29 Состав технических средств аср с последовательной синхронизацией исполнительных механизмов(сас им)
1 ИМ пропорциональные
2 Интегрирующие ИМ
РУ – регулирующее устройство;
НП – нормирующий преобразователь
ПУ-пускатель
ИМ – исполнительный механизм;
РО – регулирующий орган;
ДП – датчик положения ИМ.
Каждый предыдущий ИМ является ведущий, а ведомый последующий ИМ.
Такая система называется следящей.
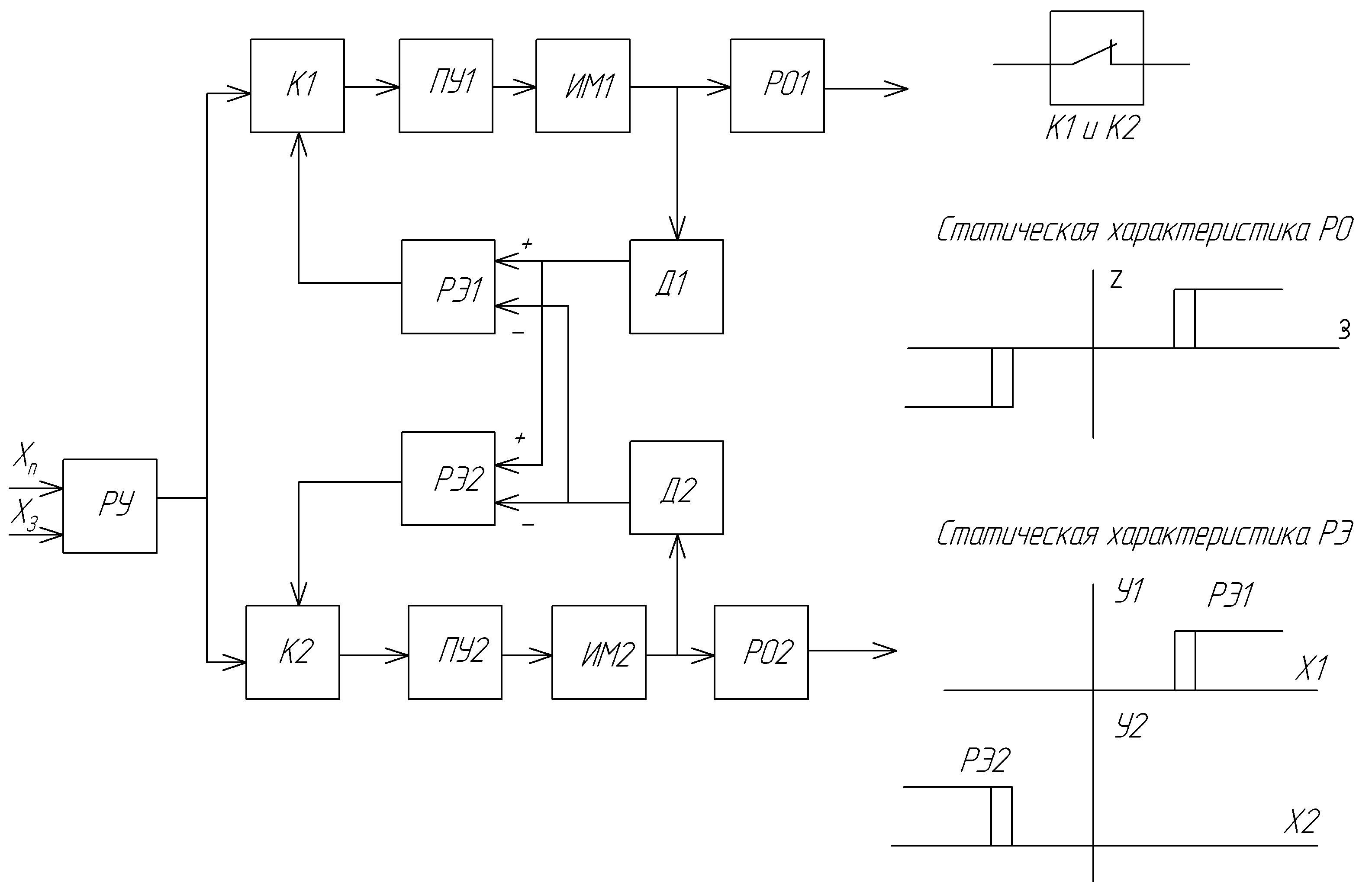
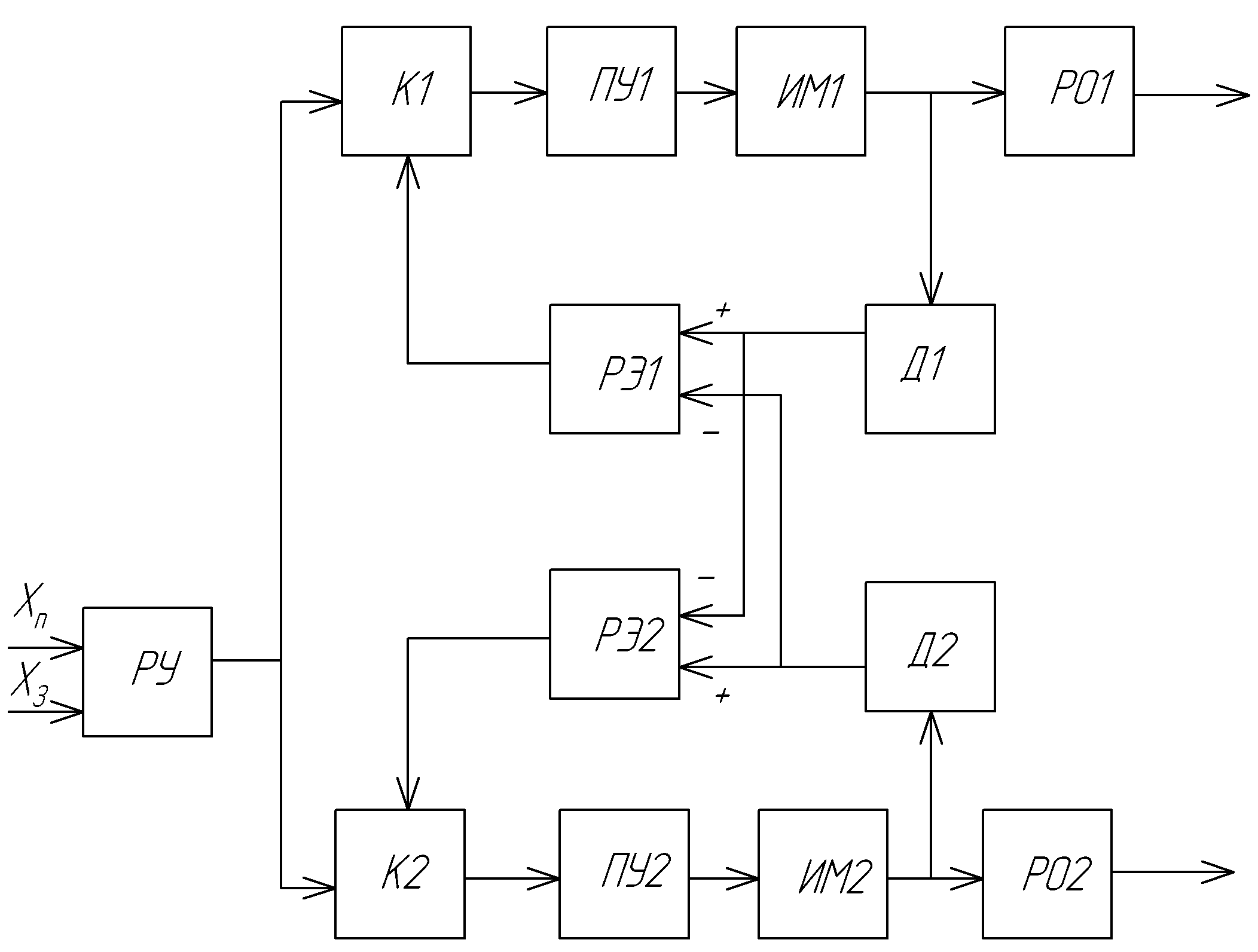
30 Состав технических средств аср с параллельной синхронизацией исполнительных механизмов(сас им)
Д – датчик положения ИМ;
РУ – регулирующее устройство
РЭ – релейный элемент;
ПУ-пускатель
ИМ – исполнительный механизм;
РО – регулирующий орган;
К1 и К2 – замыкающие ключи.
Одновременно работают ИМ1 и ИМ2.
Отключение производится того канала, который опережает другой по своему действию.
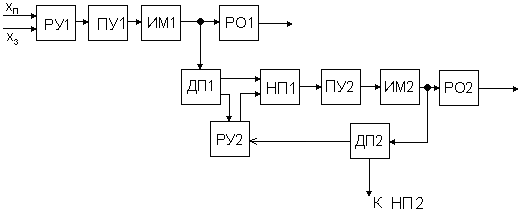
31 Состав технических средств аср с последовательно-параллельной синхронизацией исполнительных механизмов(сас им)
1 Интегрирующие ИМ

РУ – регулирующее устройство;
НП – нормирующий преобразователь
ПУ-пускатель
ИМ – исполнительный механизм;
РО – регулирующий орган;
ДП – датчик положения ИМ.
2 Пропорциональные ИМ
РУ – регулирующее устройство;
НП – нормирующий преобразователь
ПУ-пускатель
ИМ – исполнительный механизм;
РО – регулирующий орган;
ДП – датчик положения ИМ.
32 Состав технических средств аср с шаговой синхронизацией исполнительных механизмов(сас им)
Д – датчик положения ИМ;
РУ – регулирующее устройство
РЭ – релейный элемент;
ПУ-пускатель
ИМ – исполнительный механизм;
РО – регулирующий орган;
К1 и К2 – замыкающие ключи.
33 Состав технических средств аср, работающих в супервизорном режиме
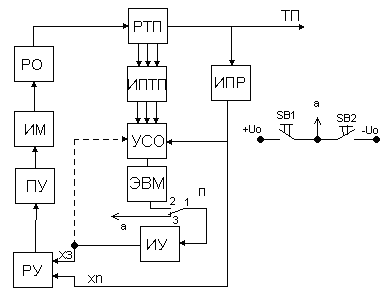
РТП – регулируемый технический процесс;
ИП – измерительный преобразователь основного параметра;
ИПТП – набор измерительных преобразователей вспомогательных технологических параметров;
ИУ – интегрирующее устройство;
РУ – резервное аналоговое устройство;
п – переключатель;
Un – опорное напряжение;
Кн1 и Кн2 – кнопки с самовозвратом.
Вместо ИУ может использоваться ЦАП.
Положение переключателя 1-3 реализуется режим супервизорного управления от управляющего вычислительного комплекса.
Выходной сигнал интегратора поступает на вход ЭВМ – это отрицательная обратная связь предназначена для проверки правильности работы ИУ и для коррекции сигнала задания по выходному сигналу ИУ.
При переводе переключателя «п» в положение 2-3 выход ЭВМ отключается от входа ИУ. Вход ИУ подключается к источнику опорного напряжения Un с помощью возвратных кнопок Кн1 и Кн2. ИУ запоминает сигнал ЭВМ в момент переключения. РУ стабилизируется на уровне заданном управляющим вычислительным комплексом.