

11. Требования к точности реализации алгоритмов управления.
Схема обобщенной математической структуры системы управления:
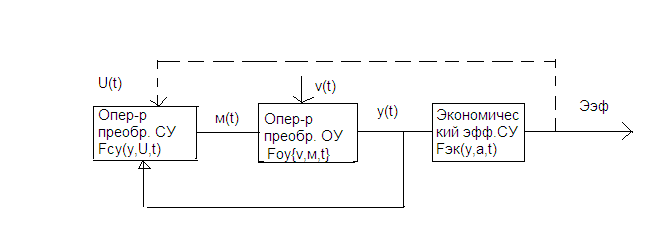
Где F – операторы преобразования, U(t) – программы задания параметров ОУ, м(t) – величина управляющего воздействия, v(t) - величина возмущающих воздействий, y(t) – технические параметры, а(t) – параметры систем управления, влияющие на величину экономической эффективности.
Рассмотрим требования к точности реализации алгоритмов управления.
Аид – идеальный алгоритм управления, Аопт – оптимальный, Апр – проектный, Ар – реальный.
Способы повышения точности ТСА:
Использование в технических средствах модулей и блоков, обладающих высокой точностью преобразования информации.
Использование компоновок, к-ые обеспечивают повышение точности.
Использование методов контроля и управления повышающих точность ТСА (например, применение компенсационного метода измерения термоЭДС).
Совершенствование конструкций ТСА.
12. Требования к надежности и простоте обслуживания тса.
Можно написать общие требования (см.11)
Существуют следующие способы восстановления характеристик надежности:
1- текущий (восст-ся работоспособность) 2- капитальный ремонт (восст-ся ресурс)
Надежность представляет собой св-во ТСА выполнять заданные функции в течение определенного интервала времени сохраняя при этом эксплуатационные показатели в заданных пределах.
Показатели надежности: наработка на отказ; вероятность безотказной работы; ремонтопригодность; время безотказной работы. Эти хар-ки учитываются: 1) при выборе ТСА; 2) Резервировании (бывает горячее, т.е. могут сразу включать резервные ТСА и холодное, когда требуется время до момента включения резервных ТСА).
Способы обеспечения высокой надежности:
Использование элементной базы имеющей высокую надежность.
Использование компоновок, к-ые обеспечивают повышение надежности.
Использование дополнительных средств повышения надежности.
Повышение надежности достигается за счет использования надежных конструктивных элементов ТСА.
Требование к простоте и удобстве обслуживания ТСА: реализация этого требования организуется при проектировании. Пример: требование к легкости доступности органов настройки.
13. Обобщенная техническая структура типовой аср.
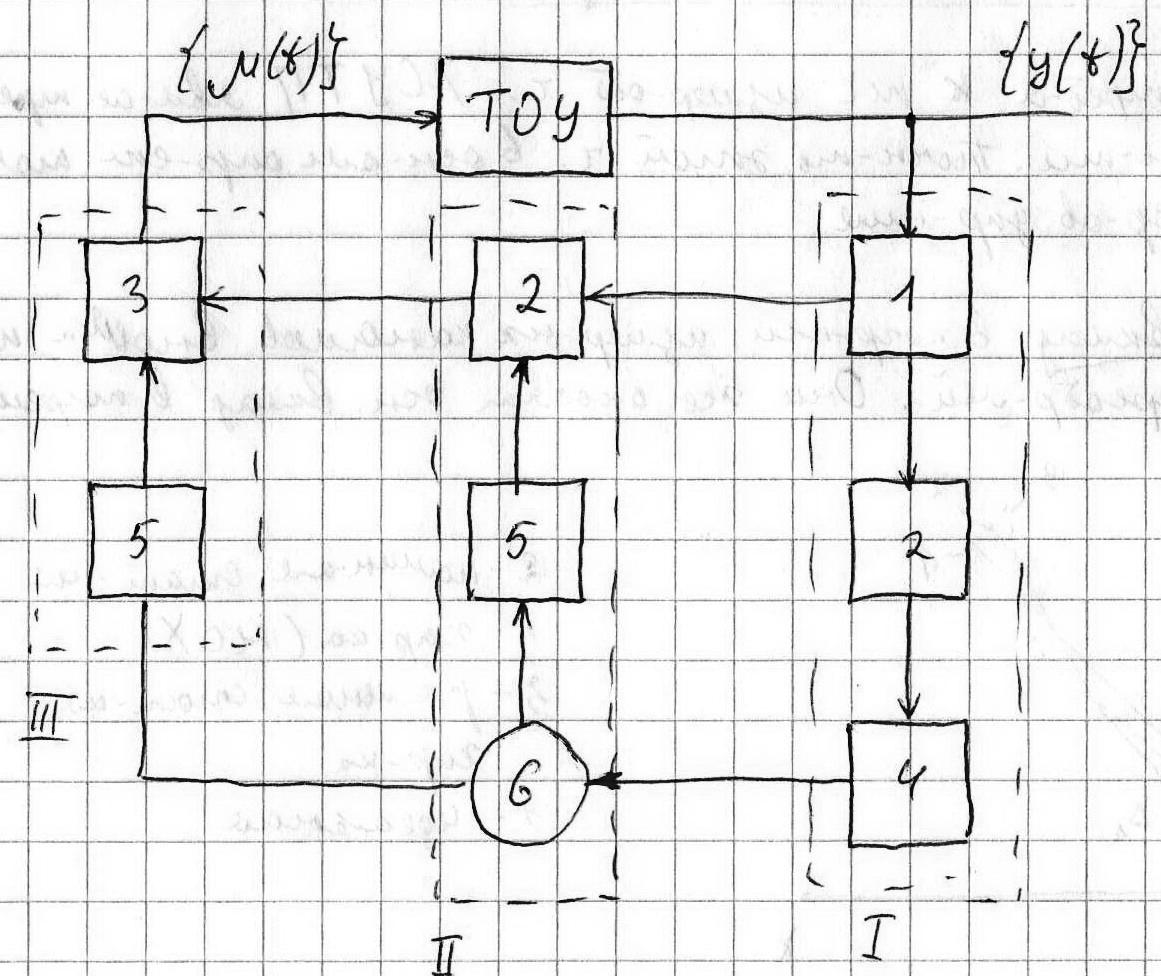
1 – комплекс технических средств получения информации. 2 - комплекс технических средств преобразования информации. 3- комплекс технических средств воздействия на ОУ. 4 - комплекс технических средств отображения информации. 5 - комплекс технических средств ввода и отображения информации. 6 – оперативный персонал.
I – измерительная подсистема
II – информационно-управляющая подсистема
III – исполнительная подсистема
14. Принцип действия релейно-импульсного регулятора.
Регулятор, который раб-т с ИМ постоянной скорости имеет импульсный вых. сигнал наз-ют. релейно-импульсным регулятором.(РИР)
Динамика РИР
1) обратная связь охватывает и управляющ. часть и ИМ.
УЧ - управляющ часть
ИМ - исполнит механ-м
ОС – обратн. связь
2) обратная связь охватывает то-ко управляющ. часть .
3) местная обратная связь ( для каждого эл-та используется собств обрат связь)
Эти структуры использ-ют для реализации РИР с различными з-ми регулирования. При этом использ. как жесткие обр. связи так и динамич. обр. связи. Причем для ИМ используют то-ко жесткую обр. связь.
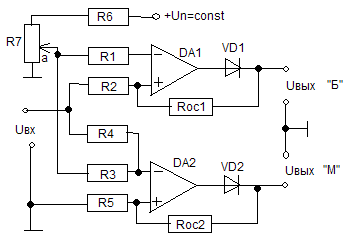
Рис – Релейно-импульсный регулятор
Roc1, Roc2 – положительная обратная связь, для создания необходимой зоны возврата.
+Un – постоянное опорное напряжение для создания зоны нечувствительности и с помощью переменного сопротивления R7.
В релейно-импульсном регуляторе для нормальной работы необходимы зоны нечувствительности и возврата. Зона возврата обеспечивает необх. скважность, с ее помощью можно регулировать длительность импульсов. (чем больше зона возврата, тем дольше импульс)
Динамика релейно-импульсного регулятора с ПИ-алгоритмом регулирования.
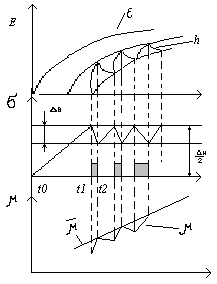
Д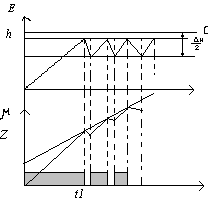 инамика
релейно-импульсного регулятора при
ступенчатом входном воздействии.
инамика
релейно-импульсного регулятора при
ступенчатом входном воздействии.