

1. Память эвм
Далее идет изложение работы практических устройств, а не чистых принципов, поэтому нужно оценивать устройства по определенным критериям. Они достаточно просты и понятны. Каждая машина, в том числе ЭВМ, выполняет определенную работу в единицу времени и характеризуется производительностью, она близка к быстродействию. Часто этот критерий является основным в конкуренции производителей ЭВМ. Однако реально нужно еще учитывать стоимость, тогда основным критерием становится производительность / стоимость (лучше, когда числитель больше, а знаменатель меньше). Это можно представить как производительность на рубль (доллар). Память ЭВМ выполняет одну из фундаментальных функций – хранение информации, то есть время изменяется, а информация остается неизменной. Запоминающих устройств великое множество даже в пределах одной ЭВМ, где они составляют целую иерархию, подчиненную центральному процессору. Конечно хотелось бы упростить структуру запоминающих устройств (ЗУ), но этого пока не удается сделать из-за противоречия их свойств, главным образом основных: объема и быстродействия. Чем выше быстродействие (лучше), тем меньше объем (хуже), поэтому приходится искать компромисс, обеспечивающий наилучшее соотношение производительность / стоимость. По быстродействию центральный процессор (ЦП - CPU) значительно превосходит ЗУ, хотя внутри самого ЦП уже существуют триггеры и регистры, которые также хранят информацию (рис.10), их быстродействие одинаково с ЦП. Есть программно доступные на языке ассемблера регистры ЦП - регистры общего назначения (РОН). Далее, следуя от регистров ЦП в порядке уменьшения быстродействия, но увеличения объема идут кэш (cache) уровня 1 ( level 1), кэш уровня 2,… Далее оперативное запоминающее устройство – основное ЗУ по объему информации, работающее прямо с ЦП, благодаря выборке информации в произвольном порядке адресов равно и записи туда информации, называемое поэтому ЗУ с произвольной выборкой (ЗУПВ – RAM - Random Access Memory). ЦП и ОЗУ составляют минимально необходимую часть ЭВМ, которая уже может функционировать. Далее к ней добавляются различные устройства, называемые внешними или периферийными (не только накопители) в зависимости от решаемых на ЭВМ задач. Предполагается, что в выключенном состоянии в ОЗУ имеется программа работы, хотя бы начальная. Здесь уместно вспомнить о концепции хранимой в ОЗУ программы наряду с данными, впервые опубликованной в 1945 г. американским ученым Джоном фон Нейманом. Концепция означает, что в ОЗУ записывается программа, по которой работает ЭВМ, и поскольку эти программы легко менять и иметь несколько программ в ОЗУ, то ЭВМ становится универсальной по выполняемым задачам.
Каждую строку таблицы называют ячейкой, куда процессор записывает информацию по задаваемому программой адресу, а затем может много раз ее считывать. При этом взамен старой информации он может записывать новую, модифицируя таким образом содержимое ячейки, предполагается, что имя переменной величины однозначно соответствует адресу ОЗУ. Объем ОЗУ представляет один из важных параметров ЭВМ. Объем кэш значительно меньше, но он быстрее. Кэш можно рассматривать как буфер между ЦП и ОЗУ, введенный для повышения быстродействия ЭВМ. Он считается «прозрачным» с точки зрения прикладного программиста, то есть управление им недоступно. Его эффективность зависит от решаемой задачи и основывается на таких статистических данных, что 10-20% данных и команд необходимы в 80-90% случаев, они и хранятся в кэш. Предполагается, что в течение какого-то времени ЦП работает с небольшой частью ОЗУ, которую помещают на это время в кэш. Понятно, что кэш имеет произвольную выборку. Рассмотрим устройство ОЗУ, оно упрощенно представлено на рис.12 и состоит из матриц запоминающих элементов, дешифратора строк (raw decoder) DC-R и дешифратора столбцов (column decoder) DC-C. На пересечениях электрических линий строк и столбцов в матрице расположены запоминающие элементы, каждый из которых хранит один бит информации. Для того, чтобы выбрать нужный элемент, требуется подать сигнал на ту линию строки и столбца, на пересечении которых находится элемент. Это делается посредством дешифраторов. Следует отметить, что дешифраторы широко применяются в ЭВМ, например, в схеме синхронизации, где они выделяют линии отдельных тактов. Дешифратор работает следующим образом: на его вход подается номер выбираемой выходной линии. Здесь следует представлять, что число входных линий дешифратора гораздо меньше, чем выходных. Например, если число входов равно 4, то число выходов равно 16 по той же формуле 2n.
Адрес столбца
А2 Матрица
 DC-R
DD
DC-C
DC-R
DD
DC-C
запоминающих элементов


Адрес строки
А1
Рисунок 12. Схема запоминающего устройства с произвольной выборкой.
Предположим, что ЗУ имеет объем 256 МБ, то есть 228. Это определяет разрядность адреса 28. Если матрица квадратная (число строк равно числу столбцов), то А1 и А2 имеют по 14 разрядов, а число выходов каждого из дешифраторов составит 214. Число элементов матрицы будет равно 214 х 214 =228. В схеме синхронизации процессора используются значительно более простые дешифраторы с числом выходов не более нескольких десятков (по числу тактов в цикле) и поэтому они работают быстрее, кроме того сама матрица требует значительного времени, что может объяснить существенно большее быстродействие процессора относительно ЗУ. Следует также указать, что одна матрица обеспечивает только один разряд, то есть имеет объем 256 Мбит, а в байте 8 бит. Таким образом, потребуется 8 параллельных матриц запоминающих элементов на одних и тех же дешифраторах.
В ОЗУ используется два типа запоминающих элементов:
конденсатор
триггер.
Конденсатор может быть в двух состояниях: заряженном и незаряженном, в первом случае на нем электрическое напряжение значительно больше, чем во втором случае благодаря наличию заряда. Заряд сохраняется на конденсаторе некоторое время. Записать информацию в один бит означает зарядить конденсатор. Однако заряд из-за проводимости изоляции (утечки) постепенно исчезает, а информация самопроизвольно стирается, поэтому ранее заряженные конденсаторы приходится подзаряжать через определенное время. Этот процесс называется регенерацией памяти и выполняется обычно через несколько миллисекунд постоянно. Для регенерации ячейки достаточно к ней обратиться или выбрать ее строку, то есть регенерация выполняется сразу по строкам. Из-за регенерации память на конденсаторах получила название динамической. В отличие от нее, память на триггерах называется статической. Для триггеров не требуется регенерации, к тому же они работают значительно быстрее, чем конденсаторы. Однако конденсаторы значительно проще и занимают на кристалле меньше места, поэтому динамическая память оказывается дешевле статической. Быстродействие памяти оценивается временем выборки информации – временем от подачи адреса памяти до получения данных на выходе, время выборки статической памяти составляет около10 нс, динамической памяти – около 20 нс. Указанные значения постоянно стараются уменьшить, хотя здесь существуют технические трудности. Учет особенностей работы ОЗУ совместно с ЦП все же позволил ускорить работу ОЗУ в системе с помощью различных приемов:
Работу ОЗУ синхронизируют с ЦП общими синхро-сигналами, это уменьшает время ожидания данных центральным процессором, Такая память называется синхронной (Synchronous DRAM - SDRAM).
Применяют пакетный режим обращения к памяти (burst), работают сразу с несколькими соседними ячейками. Например, читают сразу подряд 4 ячейки, задавая один раз адрес строки, а затем 4 раза подряд адрес столбца матрицы, каждый раз увеличивая его на 1 (ячейки располагаются вдоль строки). Время в тактах процессора в данном случае может выражаться как 5-3-3-3, при этом на первую ячейку тратится 5 тактов, так как нужно выбрать и строку, и столбец. В настоящее время для памяти задаются другие задержки (называемые «таймингами»), их может быть больше четырех.
В динамическую память вводится буфер из статической памяти размером на одну строку, и при обращении к ячейке сразу читается вся строка в буфер, а затем по мере надобности информация быстро читается из статического буфера, как кэш, это быстрая страничная выборка (fast paging mode).
На выходе памяти обычно имеется регистр выходных данных, его строят на триггерах-защелках (latch), ускоряющих доступ к информации. Это позволяет иметь время 5-2-2-2.
Повышают разрядность памяти, например, процессору Pentium требуется 32 разряда, а память применяют 64-разрядную.
Применяют параллельную работу элементов – конвейер (pipeline), см. далее.
Чередуют обращения к двум блокам памяти, так как подряд к одному блоку можно обращаться не ранее, чем пройдет время восстановления (recovery).
В современном SDRAM применяются вышеуказанные приемы, используют также синхронизацию как по переднему, так и по заднему фронтам синхро-импульсов, что позволило удвоить скорость передачи данных (Double Data Rate – DDR SDRAM).
Устанавливаемая на системную плату оперативная память конструктивно оформляется в виде модуля. Он представляет собой небольшую печатную плату с разъемом, на этой плате устанавливается несколько микросхем памяти и дополнительные микросхемы. На системной плате предусматриваются разъемы для установки нескольких модулей памяти, что дает возможность расширять объем памяти ЭВМ по мере необходимости. Если на разъеме модуля памяти контакты находятся только с одной стороны платы, то он называется SIMM (Single-In-Line Memory Module), если с двух сторон – DIMM (Double-In-Line Memory Module).
Рассмотренные выше полупроводниковые ЗУ не сохраняют записанную в них информацию при отключенном питании (энергозависимые), проблема сохранения информации решается в основном за счет применения дисковых накопителей. Однако в настоящее время имеются различные энергонезависимые полупроводниковые ЗУ, хотя и меньшей емкости, к ним относятся ПЗУ – Постоянные ЗУ (ROM - Read Only Memory). Одна из наиболее перспективных ПЗУ – флэш-память (Flash), по времени считывания она немного уступает SDRAM, но временя записи у нее гораздо больше, особенно если учесть что перед повторной записью нужно долго стирать предыдущую информацию. Кроме того флэш-память имеет ограниченное число перезаписей (порядка 106). Стоимость её невысока, однако значительно выше, чем у магнитного и тем более оптического диска.
Имеется еще небольшая статическая память с отдельной батарейкой питания, поэтому она энергонезависима. Эта память потребляет очень малую энергию благодаря комплементарной схеме (CMOS), как и наручные часы.
CMOS и ПЗУ, в том числе флэш-память используются для хранения данных конфигурации ЭВМ, а также BIOS.
Далее в иерархии памяти вслед за ОЗУ следует указать дисковые накопители информации и в первую очередь жесткие магнитные диски (Hard Disk Drive - HDD), называемые иногда «винчестерами». В них накапливается и сохраняется при выключенном питании информация ЭВМ. Энергонезависимость – фундаментальное свойство магнитных ЗУ. При записи информации частицы магнитного материала намагничиваются и сохраняют во времени эту намагниченность. При считывании информации определяется их намагниченность по их магнитному полю, однако намагниченность (информация) не разрушается, то есть информация читается многократно. Современный жесткий магнитный диск (рис. 17) вращается со скоростью 7200 об/мин или выше, эта достаточно высокая скорость вращения обнаруживается по свисту при выключении ЭВМ. На поверхности диска нанесен тонкий слой магнитного материала. В радиальном направлении, но необязательно точно по радиусу перемещается магнитная головка для установки на определенном расстоянии от центра, при этом магнитные частицы под головкой образуют окружность, называемую дорожкой (track). Отдельные дорожки представляют собой концентрические окружности на поверхности диска, как показано ниже на рис. 13. Магнитная головка располагается на очень малом расстоянии от поверхности диска и намагничивает частицы магнитного материала, нанесенные на поверхность диска при записи, либо определяет намагниченность частиц при чтении информации. Самый малый адресуемый элемент информации на диске соответствует сектору дорожки, вдоль сектора подряд располагаются биты информации.
Время поиска информации на диске – это время установки магнитной головки на нужный сектор вращающегося диска. Оно зависит от скорости движения головки по радиусу и скорости вращения диска. Естественно, обе эти скорости нужно увеличивать для снижения времени поиска. Помимо этого, увеличение скорости вращения непосредственно увеличивает и такой показатель быстродействия диска, как скорость передачи информации бит/сек (data rate). На диске информация организована в виде файлов, размер которых не регламентирован, в отличие от ОЗУ с адресами ячеек одинакового размера. В тоже время размер сектора диска фиксирован и обычно составляет 512 байт. Например, при чтении информации дисковая подсистема получает имя файла, после чего нужно последовательно находить в определенном порядке нужные секторы, которые могут располагаться не подряд. Данная задача решается с помощью специальной таблицы FAT (File Association Table), записанной в определенном месте диска, вместе с другой служебной информацией. Аналогично всем элементам ЭВМ, в том числе ОЗУ, проводится постоянная большая работа по увеличению объема, быстродействия, надежности и других показателей жестких дисков. Это привело к интеграции в единый блок всех его элементов как электромеханических, так и электронных, то есть дисковода и его контроллера. Последний можно представить как маленькую ЭВМ, учитывающую многочисленную информацию диска при его изготовлении и недоступную прикладному программисту. Такая система называется IDE (Integrated Disk Electronics). Кроме прочего, расположение в непосредственной близости контроллера и дисковода облегчило высокоскоростную связь между ними. Внутри контроллера имеется кэш-память диска. Жесткие диски подключались к системной плате плоским кабелем (шлейфом) по интерфейсу АТА (AT Attachment – средства подключения к компьютеру АТ). В настоящее время используется последовательный интерфейс SATA c кабелем круглого сечения. Реже используется интерфейс SCSI (Small Computer System Interface). Большое значение имеет надежность работы жесткого диска – главного хранилища информации ЭВМ. Его отказ приводит к потере информации, накопленной в ЭВМ, что может быть гораздо болезненнее, чем расходы на приобретение нового диска. Распространенное явление при порче диска – повреждение магнитного слоя на его поверхности. Это может произойти при касании головкой поверхности диска. Нужно бережно его эксплуатировать, например, исключать тряску при работе, уменьшать число включений-выключений, не включать при низкой температуре. Еще сравнительно недавно широко использовались накопители на гибких магнитных дисках (FDD – Floppy Disk Drive). Несмотря на их несравнимо меньший объем и скорость работы, они имели неоспоримое преимущество – сменность. Это означает, что при одном и том же дисководе и контроллере можно применять неограниченное число самих магнитных дисков – дискет. А сами они имеют очень небольшие размеры и их легко переносить от одной ЭВМ к другой, перенося таким образом информацию между ними. Концепция интеграции в гибких дисках не применяется – там контроллер диска расположен отдельно от дисковода и связан с ним кабелем. Свойство сменности носителя информации (диска) облегчает также решение вопроса информационной безопасности:
Можно архивировать информацию на случай отказа жесткого диска,
Есть возможность физически исключить доступ к информации посторонним или ее порчу от пожара, спрятав диск в сейф.
Следует отметить, что имеются сменные жесткие диски, но там меняется полностью все, в том числе и контроллер. В качестве сменных носителей информации в настоящее время широко применяются оптические диски (компакт диски CD – Compact Disk и DVD – Digital Video Disk), а также флэш-память. Сначала рассмотрим оптические диски, они имеют самую низкую стоимость хранения одного байта информации (или бита) из всех ЗУ. В оптических дисках информация представлена в виде наличия или отсутствия отраженного света от элементарной площади поверхности диска. Благодаря использованию лазера, размеры этой элементарной площади очень малы, то есть плотность записи информации очень велика. Стандартные размеры оптического диска: диаметр 120 мм, толщина 2 мм. Наименьшую стоимость имеют оптические диски типа ROM (только для чтения на ЭВМ). Информация записывается в них один раз, перезаписывать нельзя, число чтений информации с него неограничено. Во время чтения очень тонкий луч лазера падает на поверхность вращающегося диска, как показано на рис. 14.
Элементарная площадь либо отражает луч на фотоприемник, либо не отражает, таким образом в нее записан один бит информации. Последовательные биты записываются в виде непрерывной дорожки, которая имеет вид спирали, наподобие спирали грамм-пластинки, идущей от периферии к центру диска, правда, в оптическом диске направление от центра к периферии. Можно вспомнить, что компакт-диски пришли в ЭВМ из звукозаписи. Для получения постоянной скорости считывания (бит/сек) нужно по мере увеличения радиуса дорожки уменьшать угловую частоту вращения диска. Имеется в виду, что линейная плотность записи постоянна и соответственно линейная скорость светового пятна лазера тоже постоянна (CLV – Constant Linear Velosity). В рассмотренных ранее магнитных дисках постоянна угловая частота вращения (CAV - Constant Angular Velosity), а линейная скорость больше к периферии диска. Использование спиральной дорожки увеличивает время поиска информации на оптическом диске. Оптические диски широко применяются как дистрибутивные носители программ. Их значительный объем (CD - около 700 МБ, DVD – 4,7 МБ и более), позволяет хранить на одном диске очень большие программы, например операционные системы и библиотеки. Раньше приходилось использовать много дискет, что было неудобно. К тому же очень привлекательна низкая стоимость оптического диска и большой срок хранения информации. Она не подвержена постепенному разрушению, как на магнитных носителях, точнее разрушается гораздо медленнее. Возможность перезаписи информации пользователем на одном и том же оптическом диске CD-RW(Read Write) или DVD-RW еще более расширила область их применения. Используется многослойный диск , в котором на отражающую поверхность нанесен слой с изменяемой фазой состояния – кристаллической или аморфной. Фаза состояния изменяет коэффициент отражения при чтении, а при записи изменяется под воздействием луча лазера. В этом случае нужен специальный привод для чтения-записи и специальные чистые заготовки (болванки) дисков, также имеющие небольшую стоимость. Дисководы оптических дисков характеризуются скоростью чтения, записи и перезаписи. За единицу принимается скорость 150 КБ/с (скорость чтения первых CD). После величины скорости ставится значок “x”. Быстро распространяющаяся в настоящее время флэш-память как сменный носитель информации по функциям во многом аналогична оптическим дискам с той разницей, что она:
имеет значительно большую стоимость одного бита информации,
меньший объем,
более компактна,
не требует специального устройства (как дисковод).
Эти качества сделали ее удобной для переноса оперативной информации (тексты, задания , отчеты и т.д.), поэтому она в массовом применении вытеснила дискеты, при этом флэш-память имеет значительно большую надежность. В ЗУ важную роль играет вопрос достоверности хранимой информации, так как отдельные биты информации могут со временем изменять свое значение, то есть возникают ошибки. Причиной тому может быть, например, попадание микроскопической пылинки под головку дисковода, попадание альфа-частицы на запоминающий элемент ОЗУ и т.д. В данном случае предполагается временная ошибка в бите, а не постоянный дефект, который квалифицируется как устойчивый отказ. В последнем случае заменяют дефектный элемент, или целый сектор, или все устройство. Рассмотрим простой способ обнаружения ошибок – контроль четности (parity check), представленный ниже на рис. 15. Предположим, что в ЗУ записан
байт основной информации, его биты пронумерованы сверху справа налево от 0 до 7. Для конкретности взяты произвольные значения всех восьми бит. В любом одном бите может произойти ошибка (одиночная), на рис. 15 во 2-м бите вместо 1 оказался 0. Чтобы обнаружить факт одиночной ошибки к основной информации добавляется и записывается один контрольный бит, обозначенный КБ. Его значение выбирается таким, чтобы число единиц во всей группе бит (уже 9 бит) было нечетным. Тогда посчитав число единиц в каждом конкретном случае чтения группы бит, можно определить наличие ошибки. На рис. 15 число единиц в группе стало четным. Можно конечно заранее условиться наоборот, что число единиц в группе должно быть четным и исходя из этого определять значение контрольного бита. В случае ошибки чтение повторяется до тех пор, пока ошибка не исчезнет. Если она не исчезает, то имеет место устойчивый отказ.
7 6 5 4 3 2 1 0 КБ
1 0 0 1 0 1 1 0 1 нет ошибки

 основная
информация
основная
информация
7 6 5 4 3 2 1 0 КБ
1 0 0 1 0 0 1 0 1 ошибка во 2-м бите
(четвертом справа)
Рисунок 15. Контроль четности в байте
Есть более быстрый способ избавиться от ошибки – применить корректирующий код. В этом случае нужно определить, в каком бите произошла ошибка. Для этого выделяются отдельные группы бит основной информации и для каждой из них записывается свой контрольный бит. Ошибочный бит определяется по комбинации ошибочных и безошибочных групп. При коррекции ошибок приходится вводить больше служебной информации, однако это вполне приемлемо. Например, достаточно широко используется ОЗУ с коррекцией одиночных ошибок (ECC – Error Check and Correction). В накопителях применяется несколько иное правило определения контрольной информации – CRC (Cyclic Redunducy Check). По-прежнему берется блок информации определенного размера, но больше одного байта. В конце его записывается значение специального полинома, рассчитанного по значениям основной информации блока. В простейшем случае можно представить, что в конце блока записывается контрольная сумма. Рассмотренные запоминающие устройства ЭВМ можно расположить в некоторой последовательности по мере приближения к центральному процессору, в основном это однозначно связано с увеличением быстродействия, но и уменьшением объема. Как говорилось выше, существует иерархия ЗУ в ЭВМ, ее схема представлена на рис. 16, ниже, конкретные приведенные значения ориентировочные. Время доступа ОЗУ приведено для статической памяти, которая добавляется к динамической в качестве буфера (кэша). Сменные накопители, указанные в последних 3 строчках отклоняются от общей тенденции роста объема и снижения быстродействия из-за влияния функции сменности. В последней строке указаны накопители на магнитной ленте – стриммеры. Они были сравнительно мало распространены на наших ЭВМ, хотя магнитная лента в них очень широко когда-то использовалась. Для ЭВМ применяются специальные кассеты с магнитной лентой – картриджи большого объема информации с более широкой, чем в обычных кассетах, магнитной лентой. Стриммеры используются для архивирования информации, например на случай отказа жесткого диска. В настоящее время их функция выполняется чаще посредством CD-RW.
Накопители
Задержка-CAS (англ. column address strobe latency) — это время (в циклах) ожидания между запросом процессора на получение ячейки с информацией из памяти и временем, когдаоперативная память сделает первую ячейку доступной для чтения.
Латентность
Латентность является не менее важной характеристикой с точки зрения быстродействия подсистемы памяти, чем скорость «прокачки данных», но совершенно другой, по сути. Большая скорость обмена данными хороша тогда, когда их размер относительно велик, но если нам требуется «понемногу с разных адресов» — то на первый план выходит именно латентность. Что это такое? В общем случае — время, которое требуется для того, чтобы начать считывать информацию с определённого адреса. И действительно: с момента, когда процессор посылает контроллеру памяти команду на считывание (запись), и до момента, когда эта операция осуществляется, проходит определённое количество времени. Причём оно вовсе не равно времени, которое требуется на пересылку данных. Приняв команду на чтение или запись от процессора, контроллер памяти «указывает» ей, с каким адресом он желает работать. Доступ к любому произвольно взятому адресу не может быть осуществлён мгновенно, для этого требуется определённое время. Возникает задержка: адрес указан, но память ещё не готова предоставить к нему доступ. В общем случае, эту задержку и принято называть латентностью. У разных типов памяти она разная. Так, например, память типа DDR2 имеет в среднем гораздо большие задержки, чем DDR (при одинаковой частоте передачи данных). В результате, если данные в программе расположены «хаотично» и «небольшими кусками», скорость их считывания становится намного менее важной, чем скорость доступа к «началу куска», так как задержки при переходе на очередной адрес влияют на быстродействие системы намного сильнее, чем скорость считывания или записи. «Соревнование» между скоростью чтения (записи) и латентностью — одна из основных головных болей разработчиков современных систем: к сожалению, рост скорости чтения (записи), почти всегда приводит к увеличению латентности. Так, например, память типа SDR (PC66, PC100, PC133) обладает в среднем лучшей (меньшей) латентностью, чем DDR. В свою очередь, у DDR2 латентность ещё выше (то есть хуже), чем у DDR. Следует понимать, что «общая» латентность подсистемы памяти зависит не только от неё самой, но и от контроллера памяти и места его расположения — все эти факторы тоже влияют на задержку. Именно поэтому компания AMD в процессе разработки архитектуры AMD64 решила «одним махом» решить проблему высокой латентности, интегрировав контроллер прямо в процессор — чтобы максимально «сократить дистанцию» между процессорным ядром и модулями ОЗУ. Затея удалась, но дорогой ценой: теперь система на базе определённого CPU архитектуры AMD64 может работать только с той памятью, на которую рассчитан его контроллер. Наверное, именно поэтому компания Intel до сих пор не решилась на такой кардинальный шаг, предпочитая действовать традиционными методами: усовершенствуя контроллер памяти в чипсете и механизм Prefetch в процессоре (про него см. ниже).
В завершение, заметим, что понятия «скорость чтения / записи» и «латентность», в общем случае, применимы к любому типу памяти — в том числе не только к классической DRAM (SDR, Rambus, DDR, DDR2), но и к кэшу (см. ниже).
2. Механические характеристики электродвигателей (графики зависимости ω от М)
Двигатель постоянного тока (ДПТ)
 Рисунок
47. Электрическая машина постоянного
тока
Рисунок
47. Электрическая машина постоянного
тока
Первым был создан электродвигатель постоянного тока, в то время основным источником электроэнергии были гальванические батареи. Российский ученый немецкого происхождения Якоби первым построил практическую конструкцию такого двигателя в 1840 г. и установил его на лодку для привода гребного винта. Эта конструкция совершенствовалась, и получила вид, приведенный на рис. 47. На валу 1, который вращается в подшипниках 3, закреплен цилиндрический якорь 2 (ротор) из магнитного материала, на его поверхности в продольных пазах помещены проводники обмотки. На рис. 47 они представлены упрощенно в виде рамки провода, по которой идет ток I, на виде слева (расположенном справа на рисунке) этот ток изображен как “+”, уходящий от нас, и как “∙”, приходящий к нам. Если вращать ротор внешней силой по часовой стрелке со скоростью v проводника рамки, то проводник пересекает магнитный поток Ф. Магнитный поток создается электромагнитом статора 4 посредством обмоток 5, называемых обмотками возбуждения. По закону электромагнитной индукции, открытой Фарадеем в 1831 г., и известному правилу «правой руки», в проводе создается электродвижущая сила Е, создающая ток, имеющий направление, показанное на рис. 47. При этом по правилу «левой руки» этот ток одновременно создает силу F, направленную противоположно скорости v.
Если использовать данную машину как двигатель, то нужно создать с помощью внешнего источника напряжения U ток I в рамке провода, при этом создается сила F, которая поворачивает ротор и одновременно вал против часовой стрелки. Однако здесь возникает серьезная задача подвода электрического тока от неподвижного источника и проводов к вращающейся рамке. С этой целью пришлось установить для рамки два скользящих контакта, установленных на цилиндрическом коллекторе 6, а внешние проводники тока подключить к двум щеткам 7, прижатым к этим скользящим контактам. Токопроводящая рамка уходит из под щеток по мере поворота, но на ее место становится новая рамка и т.д. Можно сказать, что якорь сам себя гонит, подключая с помощью коллектора и щеток все новые рамки обмотки. Он ускоряет вращение, стремясь уравновесить приложенное извне напряжение U посредством создаваемой противо э.д.с. Е. Барабан коллектора полностью занят на все 360 0 контактами (ламелями) рамок обмотки якоря.
В идеальном случае для простоты не будем учитывать потери энергии на электрическом сопротивлении обмоток, коллектора со щетками и т.д. Тогда работа рассмотренного электродвигателя характеризуется зависимостями:
U = Е = k ∙ B ∙ l ∙ R ∙ ω (1)
где: U – напряжение на щетках двигателя, подводимое извне,
Е – противо э.д.с., создаваемая в обмотке якоря по закону электромагнитной индукции от движения проводника в магнитном поле,
k – постоянный коэффициент, характеризующий данный электродвигатель, учитывающий, например, количество витков обмоток,
B - значение индукции магнитного поля в зазоре между статором и якорем,
l - длина обмотки, якоря,
R – радиус обмотки якоря,
ω – угловая частота вращения якоря.
M = k ∙ I ∙ B ∙ l ∙ R (2)
где: M – момент на валу,
I – ток якоря.
По закону сохранения энергии в рассматриваемом идеальном случае подводимая электрическая мощность в установившемся режиме работы равна выходной механической мощности
P = U ∙ I = M ∙ ω (3)
Способность данной электромашины создавать электродвижущую силу используют для ее работы в качестве электрического генератора, а не только электродвигателя. Это соответствует общему принципу обратимости электрических машин.
В реальности при работе электромашин, как и других устройств, существуют потери энергии, что заставляет учитывать их к.п.д., он всегда меньше 1. В данном случае энергия теряется на сопротивлении электрических цепей r:
P потерь = I2 ∙ r (4)
Из соотношения (3) с учетом потерь (4) получается:
P = U ∙ I = Е ∙ I + I2 ∙ r (5)
Из соотношения (1) для двигателя получается:
U = Е + I ∙ r (6)
Для генератора получается:
U = Е - I ∙ r (7)
К сожалению, скользящие контакты щеток и коллектора порождают много проблем и являются слабым местом конструкции данной электрической машины:
трение изнашивает сравнительно мягкие токопроводящие щетки и коллектор,
искрение под щетками создает электромагнитные помехи и также ускоряет износ,
в процессе эксплуатации приходится чистить коллектор от частиц материала щеток (например, промывать ваткой, смоченной в бензине), а также заменять изношенные щетки.
Тем не менее, эта старейшая электромашина пока еще широко применяется и работает также на переменном токе, например в электроинструменте (дрели, дисковые пилы и т.д.). К ее достоинствам относится возможность достаточно просто изменять частоту вращения вала ω в зависимости от подаваемого напряжения U или индукции в зазоре B, которую можно изменять, изменяя ток возбуждения электромагнитов статора. Это вытекает из (1), из (2) следует, что можно изменять момент на валу М с помощью изменения тока I или индукции B. Это позволяет успешно их применять там, где нужен плавный запуск и регулирование частоты вращения (например, транспорт: трамвай, метро, лифт), где нужна большая частота вращения (электроинструмент: дрели, дисковые пилы и т.д.). Поскольку инструмент с такими двигателями очень распространен и работает на переменном токе, то название “двигатель постоянного тока” вызывает немало вопросов. В английской терминологии такой двигатель имеет название “brush motor – щеточный двигатель”, соответственно в русской терминологии имеется еще название “коллекторный двигатель”.
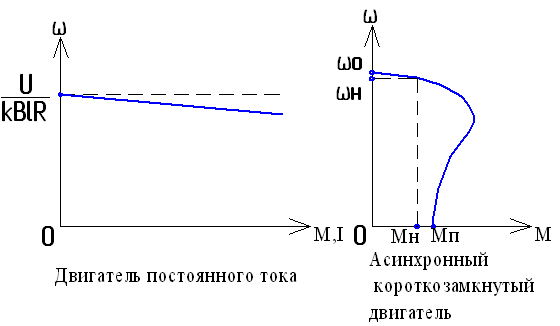
При сравнении свойств двигателей очень важной является «механическая характеристика» ω(М) - зависимость частоты вращения от момента на валу, создаваемого нагрузкой при постоянном напряжении на входе U, рис. 48. В идеальном случае, выражение (1), ω не зависит от М и определяется только напряжением на входе U=Е (противо э.д.с.). Однако в реальном случае по мере роста момента М будет расти ток I по (2), что приведет к росту потерь напряжения на сопротивлении r (7) и соответственно падению Е и падению ω из (1).
Рисунок 48. Механическая характеристика электродвигателей
Билет 8