

2. Акустическое оформление громкоговорителей (колонки)
Хотя все элементы звукового тракта влияют на качество звука, следует выделить громкоговоритель и его акустическое оформление (попросту ящик). Это называется колонкой. На рис.20 слева показана схема работы динамического громкоговорителя и, так называемое, акустическое короткое замыкание. Звуковые волны создаются колебаниями конической мембраны диффузора, приводимого в движение звуковой катушкой, по которой протекает переменный ток звуковой частоты. Этот ток описывается вышеприведенной суммой синусоид и поступает из усилителя. Катушка расположена в постоянном магнитном поле.
Билет 13
Датчики САУ (основные требования к ним, классификация, датчики приближения)
См. Билет 1
Сравнение кинематических пар вращательной и поступательной в управляемых механизмах (станки, роботы)
См Билет 12
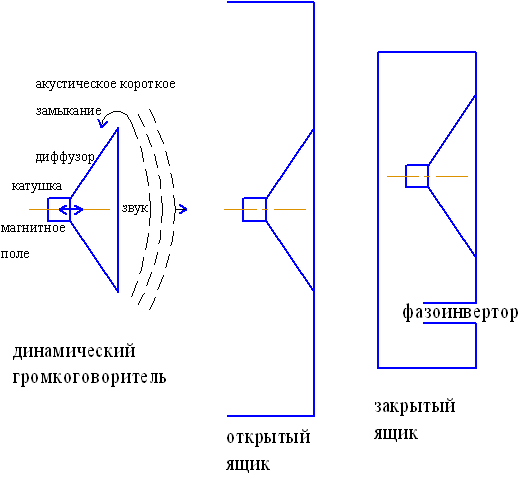
Рисунок 20. Громкоговоритель и его акустическое оформление
Движение диффузора вправо создает повышенное звуковое давление, распространяющееся в пространство правее громкоговорителя в виде звуковой волны. Однако слева от диффузора создается пониженное звуковое давление, куда легко переходит сжатый воздух справа, огибая край диффузора. Это явление по краям диффузора называется акустическим коротким замыканием, оно существенно снижает излучение звука громкоговорителем. Как показано в середине рис.20, для устранения акустического короткого замыкания громкоговоритель помещают в ящик. В этом случае путь воздуха, огибающего диффузор увеличивается в соответствии с размерами ящика. Чем больше ящик, тем лучше излучаются звуки, особенно низкие частоты. Здесь проявляется свойство волн огибать препятствия, соизмеримые с длиной волны. Например, на частоте 100 Гц длина звуковой волны (в воздухе) составит примерно 3 м (см. рис.17). Открытый ящик с размерами: 1х1,2х0,6 м практически хорошо излучает звук различных частот. Для уменьшения размеров ящика его закрывают, как показано на рис.20 справа, тогда воздух вовсе не может зайти с тыла диффузора. Однако при этом затрудняются колебания диффузора из-за сжатия воздуха в закрытом ящике. Поэтому в ящике устраивают небольшое отверстие с трубкой (фазоинвертор).
Зависимость коэффициента передачи сигнала от его частоты называется амплитудно-частотной характеристикой (АЧХ). Она позволяет более детально проанализировать качество акустической системы. На рис.21 приведен пример АЧХ для активных колонок (внутри колонки имеется усилитель) типа Defender Mercury 45 [8].
Краткие выводы из этого графика: неравномерность АЧХ составляет ±6 дБ (в 4 раза от середины по обе стороны) в диапазоне 50 - 27000 Гц. Следует отметить, что на частотах ниже 50 Гц коэффициент передачи существенно падает (завал низких частот), что соответствует общей проблеме на низких частотах.
Билет 14
1. Таблица 2.1. Описание команд:
Команда |
Описание
|
GOREADY |
Выйти в исходное положение |
SPEED |
Скорость движения до следующего объявления |
GONEAR |
Передвигаться к точке на заданное расстояние от неё |
SPEEDNEXT |
Скорость следующей команды |
GOS |
Движение по прямой с максимальной точностью |
CLOSE |
Включить излучатель |
DELAY |
Задержка излучателя |
OPEN |
Отключение излучателя |
GO |
Движение по прямой |
END |
Конец программы |
2. Бесколлекторные двигатели постоянного тока
С появлением новых электронных элементов, новых магнитных материалов удалось создать бесколлекторный двигатель постоянного тока. Одну из его конструкций, широко применяемую в ЭВМ для привода вентиляторов и дисков, можно представить следующим образом по рис. 49. Для создания магнитного поля статора по рис. 47 используются постоянные магниты, а статор затем превращают в ротор, тогда к нему не нужно подводить ток. Соответственно якорь становится статором, к нему подводится ток без всяких скользящих контактов. Возможно, поэтому удобно использовать для таких двигателей термин “якорь”, а не “ротор”, как далее в электромашинах переменного тока. Переключение рамок обмотки якоря выполняют посредством полупроводниковых ключей, которые связаны с ротором через магнитное поле. Постоянные магниты ротора приводят в действие эти специальные полупроводниковые ключи посредством эффекта Холла, то есть они переключают цепь, используя магнитные сигналы. В другом варианте двигателя используют э.д.с., наводимую ротором в обмотках статора. Для упрощения конструкции применяют минимальное число рамок обмотки якоря – две. Внешний вид статора такого двигателя приведен на рис. 49 [1]. Можно представить, что снаружи на статор одет стакан ротора с постоянными магнитами, все это находится внутри крыльчатки вентилятора и вращается на валике, вставленном центр статора. Такие двигатели создают очень малые электромагнитные помехи. + Билет 2
Билет 12 1. Охлаждение ЭВМ Рассмотренные задачи терморегулирования относились к нагреванию объектов. Однако к терморегулированию относятся не менее распространенные задачи охлаждения многочисленных машин, в том числе и ЭВМ. Задачи охлаждения машин решались задолго до создания ЭВМ, например, охлаждение моторов, охлаждение электрических машин: генераторов, трансформаторов, двигателей, охлаждение электронных устройств и т.д. Здесь снова ставится задача обеспечить текущую температуру T(t) машины Тмин≤ T(t) ≤Тмак, либо ограничение только сверху T(t) ≤Тмак. Причина такого требования состоит в том, что машина работает наиболее эффективно при заданной температуре, либо может выйти из строя при более высокой температуре Как правило, машина нуждается в охлаждении только во включенном состоянии. После включения в рабочее состояние в ней начинает выделяться тепловая энергия, которая переходит в окружающую среду. Температура машины T(t) растет до тех пор, пока количество тепла, выделяемого в ней Wвх, не сравняется с количеством тепла, уходящего во вне Wвых = Wвх (тепловое равновесие). На рис.32 слева показан случай, когда тепловое равновесие достигается при температуре, меньшей максимально допустимого значения Тмак.
 Рисунок
32. Воздушное охлаждение электронных
элементов
Рисунок
32. Воздушное охлаждение электронных
элементов
Такая картина существовала в более ранних моделях центральных процессоров, когда было достаточно естественного охлаждения окружающим воздухом без вентиляторов. Однако количество тепла на единицу площади охлаждающей поверхности по мере роста производительности ЭВМ быстро увеличивалось. В настоящее время для охлаждения микросхемы процессора 1 обычно используется кулер (cooler), состоящий из радиатора 3 (heat sink) и вентилятора 4 (fan) на рис.32. Движущийся воздух 5 повышает интенсивность теплообмена, а у радиатора поверхность специально увеличена, например с помощью выступающих иголок, ребер или зубцов. Для улучшения теплового контакта между микросхемой 1 и радиатором 3 используется специальная теплопроводная паста 2 (обычно белого цвета, но более плотная, чем зубная паста). Если не используется специальное управление вентилятором, то температура изменяется в случае вентилятора так же, как на графике слева. Как правило, имеется некоторый запас по возможности охлаждения. Однако этот запас со временем может исчезнуть из-за ухудшения условий охлаждения, например, из-за осаждения пыли на радиаторе, которая изолирует его от окружающего воздуха, этот случай показан на рис.33. После этого ЦП перегревается и может временно отказать, либо вовсе выйти из строя. Для предотвращения таких событий предусматривается тепловая защита микросхемы процессора – датчик температуры, встроенный в микросхему, и контроллер определяют наступление условия T(t) >Тмак и прекращают работу микросхемы. Для надежности эта защита реализуется не программно, а аппаратно. Техническое обслуживание ЭВМ требует регулярной очистки радиаторов от пыли. Например, на практике был случай, когда радиатор ЦП Pentium 4 неплотно к нему прилегал, но это не было сначала известно. ПК нормально работал с программами Microsoft Office, с программой Solid Works, однако зависал после примерно минуты работы в Cosmos Works при анализе прочности конструкции, полученной в Solid Works. Можно заключить, что ПК нормально работал при малой нагрузке ЦП обычно в программах диалогового режима, когда большая часть времени тратится на чтение человеком-оператором информации с экрана и вводе информации с клавиатуры или мышью. При выполнении расчетов большого объема и непрерывной работе программы Cosmos Works ЦП максимально загружался и его температура быстро достигала Тмак, что приводило к его отключению тепловой защитой. После осмотра кулера ЦП он был плотно прижат к микросхеме ЦП с помощью зажима, ПК перестал зависать на всех программах. Самый мощный кулер ПК имеется на блоке питания, который обычно расположен в верхнем дальнем углу корпуса ПК. Охлаждающий воздух заходит в корпус спереди и вытягивается вентилятором блока питания с тыла вверху. Для улучшения доступа охлаждающего внешнего воздуха к микросхемам системной платы в корпусе устраиваются боковые окна. Отказ от плоских ленточных кабелей интерфейса АТА между дисками и системной платой в пользу круглых кабелей SATA также улучшил циркуляцию охлаждающего воздуха внутри корпуса ПК.
2.Управление движениями (motion control) Существует очень большое число технических устройств, где используются движения различных элементов, например транспортные устройства, станки и т.д. Область физики, рассматривающая эти вопросы – механика. В самой ЭВМ, несмотря на преобладание электроники, используются вращающиеся вентиляторы и диски, перемещаются головки дисков, в принтерах перемещается бумага и печатающая головка, в сканере перемещается сканирующая головка. Многими из этих движений нужно управлять по различным параметрам: координатам положения, скорости, ускорению. В настоящее время для управления применяют ЭВМ. Поскольку она хорошо выполняет вычисления, то используется аналитическая геометрия, которая предполагает изначально применение системы координат. Широко используется прямоугольная система координат и несколько меньше полярная система координат. С точки зрения теоретической механики прямоугольная система координат предполагает прямолинейные поступательные движения вдоль координатных осей. Полярная система предполагает прямолинейное поступательное движение вдоль радиуса-вектора и поворот радиуса-вектора вокруг начала координат. Согласно теории механизмов и машин прямолинейное поступательное движение выполняется с помощью поступательной кинематической пары, а поворот с помощью вращательной кинематической пары. Последняя имеет определенные преимущества по технической реализации:
она имеет малые размеры и в силу этого хорошо защищается от воздействий окружающей среды и хорошо смазывается,
для нее имеется широчайший ассортимент подшипников, двигателей, датчиков и других элементов,
трение качения значительно меньше трения скольжения.
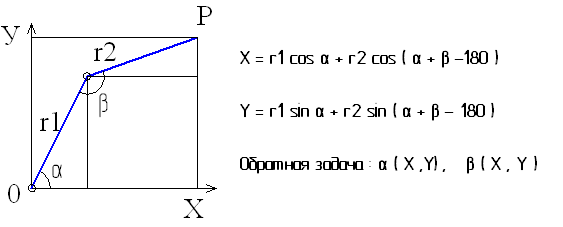
В живых организмах, прошедших проверку миллионами лет, природа использует исключительно шарниры, то есть вращательную пару. В техническом черчении используется прямоугольная система координат и соответственно в станочном оборудовании используется поступательная пара для перемещений инструмента относительно заготовки, как на рис.1. На нем изображена почти полная схема токарного станка, нужно только добавить перемещение резца по оси У. Однако непосредственно резание материала выполняется чаще с помощью вращения либо заготовки, как на рис.1, либо инструмента, например в сверлильных и фрезерных станках. В конструкциях промышленных роботов значительно шире используют вращательную пару, есть роботы построенные исключительно на таких парах, например промышленный робот РМ1. Во многом такие роботы копируют руку человека, в них используется так называемая «ангулярная система координат», показанная на рис. 42 упрощенно для плоскости. Стержень длиной r1 связан шарниром с неподвижным основанием в начале координат О. С другой стороны он связан шарниром со вторым стержнем длиной r2, на конце которого закреплен инструмент в точке Р.
 Рисунок
42. Ангулярная система координат на
плоскости.
Рисунок
42. Ангулярная система координат на
плоскости.
Для управления движением точки Р нужно определять значения углов α и β в зависимости от прямоугольных координат Х и У. Эта обратная задача, как показано на рис. 42, требует значительных вычислений с обратными тригонометрическими функциями и может быть выполнена с большой скоростью только на ЭВМ. Если вспомнить историю, то первая ЭВМ была как раз предназначена для подобной задачи – вычисления углов при артиллерийской стрельбе [1]. Именно наличие ЭВМ позволило использовать в современных машинах ангулярную систему координат и вращательные пары при автоматическом управлении. В промышленных роботах шарниры поворота с управляемыми углами называют осями. В роботе РМ1 имеется 6 осей, что создает представление об объеме необходимых вычислений при управлении им. При этом время, отводимое на эти вычисления очень мало, так как нужно успеть вычислить углы для каждой следующей точки Р при быстром перемещении инструмента по прямой или более сложной линии. Хотя и станки, и промышленные роботы нуждаются в автоматическом управлении движениями, имеется значительная разница в режиме их работы. В станках нужно выполнять траекторию движения с очень большой точностью, отклонения не должны превышать сотых долей миллиметра или даже меньше, так как это определяет точность обработки. В то же самое время усилия, прикладываемые к инструменту, могут составлять тысячи ньютонов (сотни килограммов), что может привести к значительным упругим деформациям конструкции станка, поэтому она должна быть очень жесткой (минимальные деформации под нагрузкой). По этой причине станки делаются массивными, в них стараются избегать консолей, тогда как в промышленных роботах используется обычно консольная конструкция. Отсюда можно сделать вывод, что роботы пока не годятся для выполнения очень точных движений при больших нагрузках на инструмент. Задача выполнения точных движений под большой нагрузкой в станках отчасти облегчается тем, что эти движения выполняются со сравнительно небольшой скоростью (минутная подача). Формулы механики, описывающие прямолинейное поступательное и поворотное (вращательное) движения имеют большое сходство, как показано в таблице.
Таблица 2 Формулы для прямолинейного и вращательного движений
Прямолинейное движение |
Вращение |
||
Путь |
S |
Угол поворота |
φ=S/R, где R-радиус |
Скорость |
V=S/t, где t-время |
Угловая частота вращения |
ω=φ/t |
Ускорение |
a=V/t |
Угловое ускорение |
ψ=ω/t |
Сила |
F |
Момент вращения |
M=F∙R |
Масса |
m |
Момент инерции |
J=m∙R2 |
Второй закон Ньютона |
F=m∙a |
Второй закон Ньютона |
M=J∙ψ |
Кинетическая энергия |
W=m∙V2/2 |
Кинетическая энергия |
W=J∙ω2 /2 |
Рассмотрим простую задачу перемещения тела массой m из точки 0 в точку у , как показано на графике рис. 43 . Трение для простоты не учитывается. По горизонтали задано время t, по вертикали заданы: пройденный путь S, скорость V, ускорение a. Можно выделить 3 интервала времени:
Разгон, 0-А, t1, на массу m действует сила F, создавая ускорение a = F/m , скорость растет до значения V = a∙t1, пройден путь S1 = a∙t12 /2, затрачена энергия W = m∙V2/2.
Равномерное движение, А-В, t2, сила F=0, поэтому ускорение a = 0, скорость постоянна, пройден путь S2 = V∙ t2.
Торможение, В-С, t3, действует сила торможения в обратном направлении -F , замедление –a до остановки V =0, пройден путь S3 = a∙t32 /2, выделена энергия W = m∙V2/2 .
Рисунок 43. Движение массы между двумя точками
 Такой
график движения широко распространен,
например, в станках, роботах, на железной
дороге, в метро, в лифте и т.д., при желании
это можно наблюдать. Такой же график
движения можно выполнить при повороте
(вращении на много оборотов), реально
это происходит с колесами транспорта.
Здесь можно отметить, что с целью
экономии энергии выделяемая при
торможении энергия может выть возвращена
в электросеть (называется «рекуперативное
торможение»), в автомобильных двигателях
внутреннего сгорания пока это невозможно,
энергия греет тормоза.
Такой
график движения широко распространен,
например, в станках, роботах, на железной
дороге, в метро, в лифте и т.д., при желании
это можно наблюдать. Такой же график
движения можно выполнить при повороте
(вращении на много оборотов), реально
это происходит с колесами транспорта.
Здесь можно отметить, что с целью
экономии энергии выделяемая при
торможении энергия может выть возвращена
в электросеть (называется «рекуперативное
торможение»), в автомобильных двигателях
внутреннего сгорания пока это невозможно,
энергия греет тормоза.
Выполнение указанного на рис. 43 движения характеризуется следующими параметрами:
общим затраченным временем
общей затраченной энергией
средней скоростью движения
скоростью равномерного движения в среднем участке
отклонением точки останова от заданного значения, называемой точностью останова (правильнее было бы «неточностью останова»).
Иногда ставится задача минимизации одного из параметров при ограничениях на другие параметры: например, минимизировать затраченное время (п.1) при отклонении (5) не более заданного значения. Практическое решение подобных задач часто осложняется такими условиями, как случайные помехи, называемыми иногда «возмущениями», например, перемещения в условиях вибрации, толчков, изменений температуры и т.д. Один из ярких примеров возмущений – качка судна во время волнения при стрельбе из орудий. Следует отметить, что уменьшение влияния возмущений является основной задачей систем управления с отрицательной обратной связью. В принципе, отрицательная обратная связь ослабляет всякие отклонения от цели, так как усиленное рассогласование действует на объект управления, возвращая его в заданное состояние. Рассмотренная ранее схема управления ПИД для нагревателя служит для решения указанной задачи минимизации времени при заданной точности. То же самое применимо к управлению движениями объектов. Минимизация времени движения предполагает увеличение скорости движения и соответственно ускорений и усилий при заданной массе объекта. Это требует увеличения мощности исполнительных элементов, а она, как правило, ограничена. Это касается не только разгона, но и торможения, когда нужно убрать кинетическую энергию, сообщенную объекту при разгоне. При недостаточной мощности торможения объект в силу инерции перебегает дальше заданной точки останова. Чтобы исключить или уменьшить перебег, нужно правильно выбрать начало торможения.
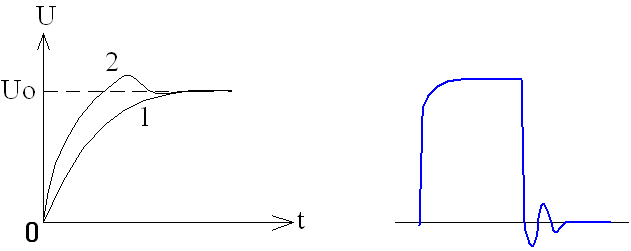
Рисунок 44. Завершение движения.
На рис.44 слева показано 2 случая завершения движения: 1 – плавный подход к заданному значению Uo (асимптотический), 2 – колебательный. Второй происходит быстрее, но за счет инерции возникает перебег, который нужно исправлять и возвращаться назад и т.д. Справа показана типичная форма импульсов цифрового электронного устройства.
Эти правила мы знаем и чувствуем с раннего возраста, однако у человека может не хватить скорости реакции, тогда как автоматические устройства, в том числе с управляющими ЭВМ успевают решать задачи. Кроме того, они работают точнее, благодаря применению математических методов расчета, управляющих устройств, построенных на их основе, и управляющих ЭВМ, в программах которых учтены различные факторы.
Билет 15