

2. Синхронный двигатель (сравнение с асинхронным)
10.2.2. Асинхронный двигатель
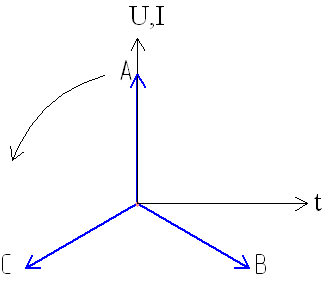
Наибольшее распространение в промышленности получил асинхронный двигатель переменного тока с короткозамкнутым ротором (squirrel-cage induction motor). Честь его изобретения принадлежит М. Доливо-Добровольскому в 1890 г. Такой двигатель имеет ряд достоинств: высокий к.п.д., высокую надежность, простоту конструкции, низкую стоимость. Его недостатки - сложность регулирования частоты вращения и большие пусковые токи. В настоящее время эти недостатки преодолены, благодаря современным электронным средствам коммутации и управления с помощью ЭВМ, удешевившим частотное управление приводом (рассматривается в дальнейшем). 3 фазы напряжения и тока, подаваемые по трем проводам. Изначально на электростанции турбогенераторы создают переменное напряжение, вращая электромагнит ротора внутри 3-х фазной обмотки статора. На рис. 52 внизу показаны различные положения вращающегося ротора (полюса магнита Ю и С в соответствии со стрелкой компаса) и соответственно значения каждой из 3-х фаз тока: I1, I2, I3. Для удобства представления каждая синусоида изображается вращающимся вектором, при этом она получается как проекция на вертикальную координатную ось. Эти 3 синусоиды принято изображать, как на рис.53, а фазы обозначать латинскими буквами А, В, С.
Рисунок 52. Получение 3-х фазного тока в генераторе
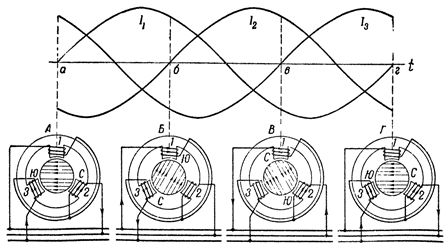
Рисунок 53. Трехфазная система напряжений и токов
Когда трехфазный ток попадает в аналогичную генератору трехфазную обмотку статора электродвигателя, то он также создает вращающееся магнитное поле. Но ротор двигателя построен совершенно иначе. У него изначально нет никаких магнитов, в роторе помещены короткозамкнутые толстые проводники.
При включении электродвигателя в сеть вращающееся магнитное поле пересекает проводники ротора, наводя (индуцируя) в них э.д.с. (отсюда англ. название “induction motor”). Эта э.д.с. вызывает токи, которые создают магнитный поток ротора, сцепляющийся с вращающимся полем статора, которое увлекает за собой ротор и он начинает вращаться. В первый момент пуска поле статора вращается относительно ротора с максимальной частотой ω0 = 2 π f, где: f – частота электросети, равная 50 Гц (в Европе). Постепенно ротор раскручивается, разница частот вращения ротора ω1 и поля статора: ω0 – ω1 уменьшается, но она не может сравняться с нулем. Причина здесь в том, что при нулевой разнице поле статора не будет пересекать проводники ротора, не будет токов ротора и не будет сцепления ротора с полем статора. Относительную разницу частот вращения ротора и поля статора принято называть “скольжением” s = (ω0 – ω1) / ω0; 1 ≥ s ≥0. В момент пуска асинхронный короткозамкнутый двигатель потребляет большой пусковой ток, при этом s = 1. Он похож на трансформатор, у которого накоротко замкнута вторичная обмотка, в которой течет большой ток короткого замыкания (соответственно в названии двигателя “короткозамкнутый ротор”). По мере раскручивания ротора, ток в нем уменьшается, уменьшается и ток статора, потребляемый от электросети.
Из-за больших бросков тока пуск асинхронного короткозамкнутого двигателя, особенно большой мощности, создает проблемы для другого оборудования, подключенного к сети, так как в сети падает напряжение. Применение частотного регулирования скорости двигателя снимает проблемы пуска. На рис.48 справа показана механическая характеристика асинхронного двигателя. В момент пуска при неподвижном роторе двигатель развивает пусковой момент Мп, показанный точкой на горизонтальной оси при ω = 0. Двигатель может раскручиваться, если момент сопротивления от нагрузки меньше Мп. На рис. 48 Мн обозначает номинальный момент нагрузки, на который рассчитан двигатель. Частота вращения растет и устанавливается в верхней точке на вертикали Мн, при этом существует некоторое скольжение. Если снять момент нагрузки М=0, то установится так называемый режим холостого хода, когда скольжение уменьшится почти до нуля, и ротор будет вращаться почти с максимальной частотой ω0.
10.2.3. Синхронный двигатель
По принципу обратимости электрических машин данный двигатель имеет то же устройство, что и синхронный генератор переменного тока на рис.52. У него такая же обмотка статора, как и у асинхронного двигателя, но ротор обычно представляет собой постоянный магнит, который жестко притягивается к вращающемуся полю статора без всякого скольжения. Частота его вращения ω0 = 2 π f независимо от момента нагрузки, поэтому он называется синхронным. Это ценно для системы управления, однако у него очень малый пусковой момент, значительно меньше, чем у асинхронного, поэтому в его роторе помещают часто еще и короткозамкнутую обмотку. Таким образом, он становится также и асинхронным при пуске.
Билет 3
1. Контроллер памяти, шина процессора
Контроллер памяти — цифровая схема, управляющая потоком данных к и от оперативной памяти. Может представлять собой отдельную микросхему или быть интегрирована в более сложную микросхему, например, в северный мост, микропроцессор или систему на кристалле.
Контроллер памяти содержит логические цепи, необходимые для проведения операций чтения и записи в DRAM, а также для обновления хранимых в DRAM данных. Без периодических обновлений чипы памяти DRAM теряют информацию, так как разряжаются токами утечки конденсаторы, хранящие биты. Типичное время надежного хранения информации составляет доли секунды, но не менее 64 миллисекунд согласно стандартам JEDEC. На более длительных периодах времени информация сохраняется лишь частично.
DRAM (Dynamic random access memory, Динамическая память с произвольным доступом) — тип энергозависимой полупроводниковой памяти спроизвольным доступом; DRAM широко используемая в качестве оперативной памяти современных компьютеров, а также в качестве постоянного хранилища информации в системах, требовательных к задержкам.
Физически DRAM состоит из ячеек, созданных в полупроводниковом материале, в каждой из которых можно хранить определённый объём данных, строку от 1 до 4 бит. Совокупность ячеек такой памяти образуют условный «прямоугольник», состоящий из определённого количества строк и столбцов. Один такой «прямоугольник» называется страницей, а совокупность страниц называется банком. Весь набор ячеек условно делится на несколько областей.
Как запоминающее устройство, DRAM представляет собой модуль памяти различных конструктивов, состоящий из электрической платы, на которой расположены микросхемы памяти и разъёма, необходимого для подключения модуля к материнской плате.
В большинстве современных x86-систем (то есть компьютеров на базе x86-процессоров), процессор как устройство к памяти обращаться вообще не может, так как не имеет в своем составе соответствующих узлов. Поэтому он обращается к «промежуточному» специализированному устройству, называемому контроллером памяти, а уже тот, в свою очередь — к микросхемам ОЗУ, размещенным на модулях памяти. Модули вы наверняка видели — это такие длинные узкие текстолитовые «планочки» (фактически — небольшие платы) с некоторым количеством микросхем на них, вставляемые в специальные разъемы на системной плате. Роль контроллера ОЗУ, таким образом, проста: он служит своего рода «мостом»* между памятью и использующими ее устройствами (кстати, к ним относится не только процессор, но об этом — чуть позже). Как правило, контроллер памяти входит в состав чипсета — набора микросхем, являющегося основой системной платы. От быстродействия контроллера во многом зависит скорость обмена данными между процессором и памятью, это один из важнейших компонентов, влияющих на общую производительность компьютера.
* — кстати, контроллер памяти физически находится в микросхеме чипсета, традиционно называемой «северным мостом».
Процессорная шина
Любой процессор обязательно оснащён процессорной шиной, которую в среде x86 CPU принято называть FSB (Front Side Bus). Эта шина служит каналом связи между процессором и всеми остальными устройствами в компьютере: памятью, видеокартой, жёстким диском, и так далее. Впрочем, как мы уже знаем из предыдущего раздела, между собственно памятью и процессором находится контроллер памяти. Соответственно: процессор посредством FSB связывается с контроллером памяти, а уже тот, в свою очередь, по специальной шине (назовём её, не мудрствуя лукаво, «шиной памяти») — с модулями ОЗУ на плате. Однако, повторимся: поскольку «внешняя» шина у классического x86 CPU всего одна, она используется не только для работы с памятью, но и для общения процессора со всеми остальными устройствами