

19. Кинематический анализ механизмов, суть и задачи анализа, термины: входное звено, закон движения, входная координата, передаточная функция
Кинем. анализ механизмов состоит в определении движения его звеньев по заданному движению начальных звеньев. (Известной считается кинематическая схема механизма)
Задачи:
Определение положений звеньев и траекторий отдельных точек звеньев
Определение линейных скоростей и ускорений точек и угловых скоростей и ускорений звеньев
Определение передаточных отношений между звеньями
Входное звено - звено, задающее движение всех остальных звеньев механизма (кривошип, ползун)
Входная координата – коорд., определяющая положение входного звена
Закон движения ( зависимость входной корд. от времени)

Передаточная ф-ция – матем. выражение, связывающее координаты входного и выходных звеньев


20.Кинематические характеристики механизмов: передаточное отношение, передаточное число (определения, обозначения, свойства)
Характер преобразования движения в механизме описывается передаточным отношением i (алгоритм преобразования движения в механизме)

Кинематические параметры:
i - передаточное отношение (ПО)
u – передаточное число (ПЧ)
Передаточное число показывает во сколько раз изменяется в механизме одноименный параметр движения
Свойства ПО:
При послед. соединении механизмов суммарное ПО равно произведению ПО отдельных механизмов

При передаточном движении в прямом и обратном направлении



Свойства ПЧ:
Зубчатая пара при внешнем зацеплении
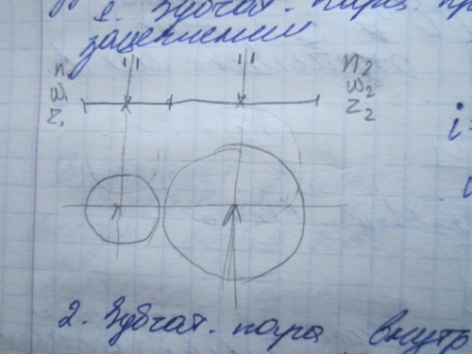

Зубчатая пара внутреннего зацепления


Последовательное соединение зубчатых колес

4.Ступенчатое
соединение зубчатых колес
21-22.
21. Кинематика зубчатых передач, расчет кинематических характеристик.
22. Свойства передаточных чисел и передаточных отношений, их расчет при последовательном соединении передач.
Зубчатая
передача – это трехзвенный механизм,
в котором два подвижных звена являются
зубчатыми колесами, образующими между
собой высшую пару. Зубчатые передачи –
самый распространенный вид механических
передач.В зависимости от расположения
осей вращения колес различают следующие
виды зубчатых передач: 1) с параллельными
осями (цилиндрические); 2) с пересекающимися
осями (конические); 3) со скрещивающимися
осями (гипоидные). Цилиндрические
передачи относятся к плоским механизмам,
а конические и гипоидные – к
пространственным.Зубчатое колесо
передачи с меньшим числом зубьев
называется шестерней, а с большим числом
зубьев – колесом. Отношение числа зубьев
колеса (2)
к числу зубьев шестерни (1)
называется передаточным числом: .По
соотношению угловых скоростей ведущего
и ведомого
звень-ев зубчатые передачи делятся на:
а) понижающие (редукторы) и б) повышающие
(мультипликаторы). У понижающих передач
ведомое звено вращается с меньшей
скоростью, чем ведущее, а у повы-шающих
– наоборот.Основным кинематическим
параметром зубчатого механизма является
передаточное отношение.Передаточным
отношением
.По
соотношению угловых скоростей ведущего
и ведомого
звень-ев зубчатые передачи делятся на:
а) понижающие (редукторы) и б) повышающие
(мультипликаторы). У понижающих передач
ведомое звено вращается с меньшей
скоростью, чем ведущее, а у повы-шающих
– наоборот.Основным кинематическим
параметром зубчатого механизма является
передаточное отношение.Передаточным
отношением
 называется отношение угловой скорости
звена 1 (1)
к угловой скорости звена 2 (2).
называется отношение угловой скорости
звена 1 (1)
к угловой скорости звена 2 (2).
 или
или
 .Если
.Если
 и
и
 :
: и
и
 ,где
n1
и n2
– частота вращения, мин-1,
звена 1 звена 2.
,где
n1
и n2
– частота вращения, мин-1,
звена 1 звена 2.
Д ля
механизмов с параллельными осями
передаточное отношение считается
положительным при одинаковом направлении
угловых скоростей и отрицательным –
при противоположном.Для цилиндрической
передачи знак «плюс» соответствует
внутреннему зацеплению а «минус» –
внешнему.Передаточное отношение можно
представить в виде
ля
механизмов с параллельными осями
передаточное отношение считается
положительным при одинаковом направлении
угловых скоростей и отрицательным –
при противоположном.Для цилиндрической
передачи знак «плюс» соответствует
внутреннему зацеплению а «минус» –
внешнему.Передаточное отношение можно
представить в виде
 .
передаточное отношение многоступенчатой
передачи равно
произведению передаточных отношений
отдельных ступеней.Направление
вращения колес можно определить с
помощью стре-лок,
поставленных на схеме механизма.
Многоступенчатый
зубчатый механизм можно образовать
последовательным соединением колес.
Передаточное отношение червячной
передачи равно отношению числа зубьев
колеса к числу витков червяка:
.
передаточное отношение многоступенчатой
передачи равно
произведению передаточных отношений
отдельных ступеней.Направление
вращения колес можно определить с
помощью стре-лок,
поставленных на схеме механизма.
Многоступенчатый
зубчатый механизм можно образовать
последовательным соединением колес.
Передаточное отношение червячной
передачи равно отношению числа зубьев
колеса к числу витков червяка: ,где
2
– число зубьев червячного колеса; 1
– число витков червяка; n1
и n2
– частота вращения червяка и колеса,
мин-1.Знак
для общего передаточного отношения
ставят лишь в том случае, когда входной
и выходной валы вращаются относительно
осей, параллельных друг другу.
,где
2
– число зубьев червячного колеса; 1
– число витков червяка; n1
и n2
– частота вращения червяка и колеса,
мин-1.Знак
для общего передаточного отношения
ставят лишь в том случае, когда входной
и выходной валы вращаются относительно
осей, параллельных друг другу.
Планетарные и дифференциальные механизмы
В практике применяются зубчатые механизмы, имеющие колеса с подвижными геометрическими осями (сателлиты). Такие механизмы называются планетарными (если имеют одну степень свободы) или дифференциальными (если степень свободы равна двум).
Планетарные и дифференциальные механизмы позволяют получить более высокий кинематический эффект, более высокий кпд, более удобную компоновку. Дифференциальные механизмы позволяют также раскладывать одно движение на два или складывать два движения в одно.

а) б)
Рисунок 37
На рисунке 37 приведен пример дифференциального (рисунок 37 а) и планетарного механизмов (рисунок 37 б). В этих механизмах колесо "2" имеет подвижную геометрическую ось – это и есть сателлит.
Неподвижная геометрическая ось, вокруг которой движется ось сателлита, называется центральной осью. Колеса, геометрические оси которых совпадают с центральной, также называются центральными (на рисунке 37 колеса "1" и "3" – иногда такие колеса называют солнечными). Звено, соединяющее ось сателлитов с центральной осью, называется водилом ( водило обычно обозначается "H").
При кинематическом исследовании дифференциальных и планетарных механизмов применяется метод обращения движения (по-другому его называют методом остановки водила). Смысл этого метода заключается в том, что если всем звеньям системы добавить (с любым знаком) одну и ту же скорость, то характер относительного движения этих звеньев не изменится.
Передаточное
отношение планетарного механизма
определяется формулой Виллиса:
