

12.Состав рабочей машины: звено, узел, механизм, привод.
Звено - одно или несколько неподвижных соединений твердого тела. Неподвижное звено-стойка.
Механизм - совокупность связанных между собой тел, имеющих определенные движения. Привод – совокупность устройств, предназначенных для приведения в действие машин. Состоит из двигателя, трансмиссии и системы управления.
13.Структурный анализ механизмов, звено, кинематическая цепь
Звено - одно или несколько неподвижных соединений твердого тела. Неподвижное звено-стойка.
Кинематическая пара - подвижное соединение 2х звеньев, налагающая ограничение на их перемещение.
Кинематическая цепь - совокупность кинематических пар.
14.Понятие степень свободы, число степеней свободы плоских и пространственных механизмов, подвижность механизмов.
Степени свободы — это совокупность независимых координат перемещения и/или вращения, полностью определяющая движение и/или положение тела или системы тел.
Число степеней свободы для пространственных и плоских механизмов:
W=6n-i* Pi=6n-5PV-4PIV-3PIII-2PII-1PI-
для
пространственных механизмов
Pi=6n-5PV-4PIV-3PIII-2PII-1PI-
для
пространственных механизмов
W=3n-𝛴Pi=3n-2PII-1PI-для плоского механизма
Подвижность(W) определяется числом степеней свободы твердого тела.
15.Структурный анализ плоского рычажного механизма, оценка его подвижности
Рычаг-твердое тело, имеющее неподвижную ось вращения, нагруженную силами, действующими в плоскости, перпендикулярной оси вращения.
Кривошип- звено, вращающееся вокруг неподвижной стойки (задает движение механизма)(W=1)
Шатун – звено, присоединенное к кривошипу и совершающее сложное плоское движение
Ползун – звено, совершающее поступательное движение
Кулиса – подвижное звено, по которому перемещается ползун
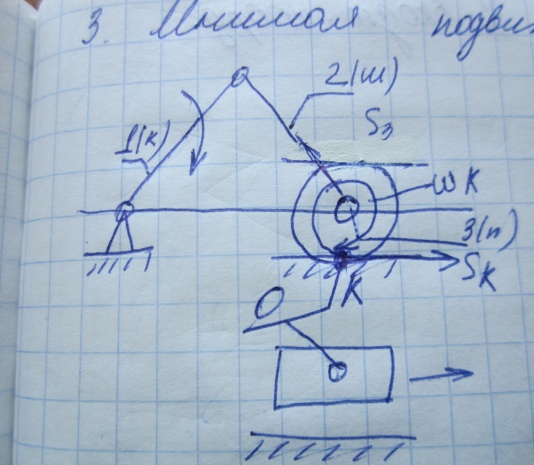
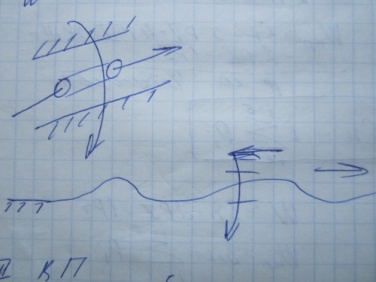
16. Структурный анализ пространственного рычажного механизма, оценка его подвижности.
Пространственные механизмы

Особенности при определении подвижности
Сдвоенная кинематическая пара


Избыточная связь

Мнимая подвижность

17. Схемы плоских шарнирно-стержневых механизмов, термины: кривошип, шатун, ползун, кулиса, коромысло.
Кривошип- звено, вращающееся вокруг неподвижной стойки (задает движение механизма)

Шатун – звено, присоединенное к кривошипу и совершающее сложное плоское движение

Ползун – звено, совершающее поступательное движение

Кулиса – подвижное звено, по которому перемещается ползун

Коромысло - ??????
18. Понятие «кинематическая пара», виды кинематических пар, их условное изображение
Кинематическая пара - подвижное соединение 2х звеньев, налагающая ограничение на их перемещение.
VI класс (нет пары)
S=6, W=0
V класс: (поступательная пара, вращательная пара)
S=5, W=1
1)

2)


IV класс: (цилиндрическая пара, винтовая пара)
S=4, W=2
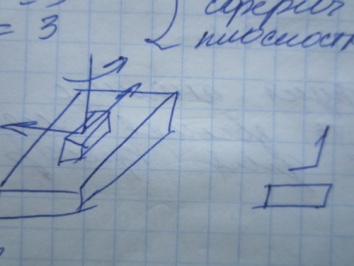
III класс: (сферическая пара, плоскостная пара)
S=3, W=3
II класс: Цилиндрическая плоскость
S=2, W=4

Классификация КП
W S Класс-ция КП
6 0 нет пары - I класс
5 1 II класс
4 2 III класс
3 3 IV класс
2 4 V класс
0 6 VI класс (нет пары)
I класс: нет пары S=1, W=5