

2.6 Исследование движения робота
Рассмотрим
реализацию роботом одного прыжка под
углом 450
к горизонту при линии действия силы
F12,
проходящей через центр масс объекта,
![]() м.
По временным зависимостям рис.
8 – 12
можно выделить пять этапов движения
объекта: 1,4 – поворот относительно
неподвижной точки А,
2 – плоскопараллельное движение с
отрывом корпуса от поверхности под
действием силы F12,
3 – полет, 5 – статическое положение с
двумя точками опоры. Первые два этапа
происходят во время фазы разгона, третий
соответствует фазе полета, четвертый
и пятый – фазе приземления.
м.
По временным зависимостям рис.
8 – 12
можно выделить пять этапов движения
объекта: 1,4 – поворот относительно
неподвижной точки А,
2 – плоскопараллельное движение с
отрывом корпуса от поверхности под
действием силы F12,
3 – полет, 5 – статическое положение с
двумя точками опоры. Первые два этапа
происходят во время фазы разгона, третий
соответствует фазе полета, четвертый
и пятый – фазе приземления.
Рис.
8. Графики перемещений вдоль оси Ох:
![]() – С,
– С,
![]() – А1,
– А1,
![]() – А2,
– А2,
![]() – А3,
– А3,
![]() –
А4
–
А4
Рис. 9. Графики перемещений вдоль оси Оу: – С, – А1, – А2, – А3, – А4
Рис. 10. Графики угловых перемещения и скорости
Рис. 11. Графики нормальных реакций в опорных точках корпуса:
– А1, – А2, – А3, – А4
Рис. 12. Траектории движения точек робота:
– С, – А1, – А2, – А3, – А4
Привести графики для разных длин ноги и для разных значений силы
Для проектирования конструкции робота будем использовать результаты численного моделирования.
Длина полностью выдвинутой ноги – 0,15 м,
Сила, необходимая для реализации прыжка на высоту не менее 0,8 м, – 500 Н.
3 Расчетно-конструкторский раздел
Требуется разработать конструкцию ноги двуногого прыгающего робота, выполнить расчет приводов, обеспечивающих поворот звеньев ноги друг относительно друга и ноги относительно корпуса, а также привода линейного перемещения ноги.
3.1 Энергетический расчёт электроприводов
В соответствии с разрабатываемой конструкцией ноги прыгающего робота, описанной в п. 2.1, проведем расчет приводов, обеспечивающих ее позиционирование.
Энергетический расчет является важной частью процесса проектирования и направлен на рациональный выбор двигателя и преобразователя движения, которые обеспечивают заднные законы движения его выходного звена [2].
Чтобы узнать крутящий момент на валу электроприводов, необходимо рассчитать моменты инерции относительно осей их вращения.
3.1.1 Расчет электропривода поворота ноги относительно ступни
Схема для расчета привода, обеспечивающего поворот звеньев нога-стопа, показана на рисунке 3.1. Расчет будем проводить, исходя из того, что угловая скорость вращения звеньев друг относительно друга должна быть равной 45 град/с.
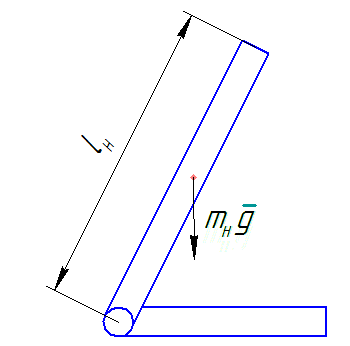
Рис. 5 Расчетная схема для выбора привода поворота ноги относительно ступни
Момент инерции для вала:
![]() ,
где
,
где
mН – масса ноги, кг;
LН – длина ноги, м.
Запишем выражение для определения выходного момента и подставим численные значения, получим:
![]()
где - угловое ускорение, рад/с2.
Отсюда найдем момент на валу двигателя:
![]()
Из полученных данных найдем выходную мощность привода:
![]()
Рассчитаем необходимую мощность двигателя:
![]()
Исходя из рассчитанной мощности, выберем электродвигатель RE 6 фирмы Maxon, мощность которого составляет 0,3 Вт.

Рис. 6 Двигатель фирмы Maxon
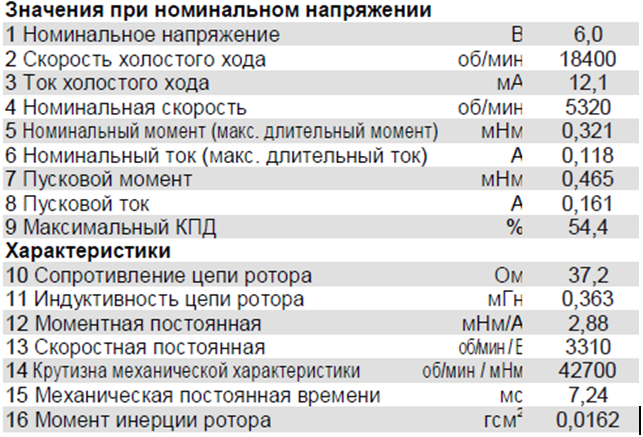
Рис. 7 Технические характеристики двигателя
Для
подбора редуктора к данному двигателю
нам необходимо перевести скорость
двигателя в рад/с:
![]() рад/с.
рад/с.
Рассчитаем передаточное отношение редуктора:
![]()
Из каталога был выбран редуктор планетарный редуктор GP 6 A, который совместим с двигателем, что обеспечивает простую сборку привода.
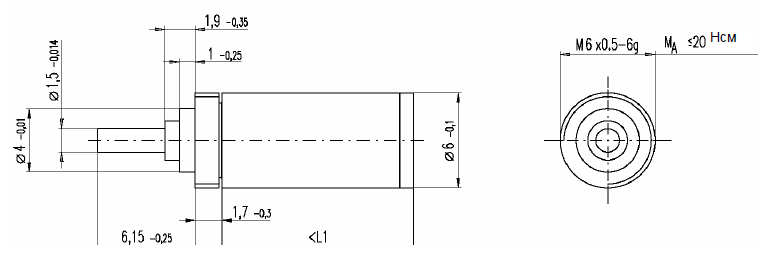
Рис. 8 Размеры редуктора
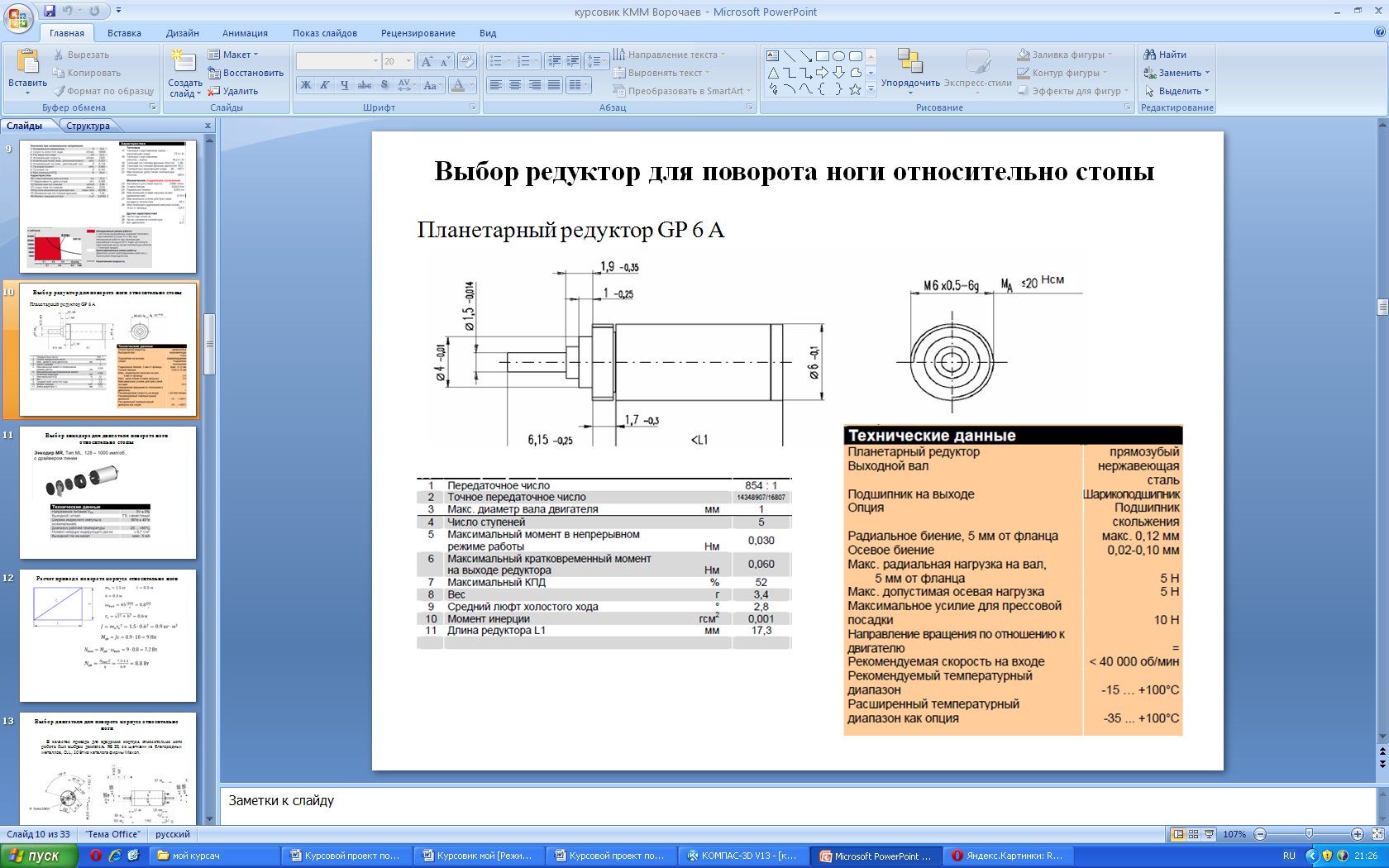
Рис. 9 Характеристики редуктора
Проверим выходной момент и угловую скорость полученного привода:
![]()
Данное значение полностью удовлетворяет требуемому.